DevoxxFR 2024 Reproducible Builds with Apache Maven
Point-Of-Interest Visualization (LBS 2009)
1. Strategies for Visualizing Points-of-Interest of 3D Virtual Environments on Mobile Devices Matthias Trapp, Lars Schneider, Norman Holz, Jürgen DöllnerHasso-Plattner-Institute, University of Potsdam, Germany
2. 3D virtual environments (3DVE) goes mobile: Nurminen did that before (2006) but: new advances in mobile graphics hardware hardware accelerated 3D rendering is available experiments with high-order visualization determine current device limitations ! 3D visualization of points-of-interests (POIs): facilitate navigation & exploration in 3DVE involves per-frame geometry management and rendering applications: augmented reality, pedestrian navigation ? motivation 2 :: LBS 2009 :: Strategies for Visualizing Points-of-Interest of 3D Virtual Environments on Mobile Devices :: Matthias Trapp ::
3. :: LBS 2009 :: Strategies for Visualizing Points-of-Interest of 3D Virtual Environments on Mobile Devices :: Matthias Trapp :: 3 result preview 3D halo circle 3D halo projection
4. challenges & problem statement 3D visualization of point-of-interests 3D halo projection & 3D circle approach occlusion management implementation overview discussion & conclusions & future work agenda 4 :: LBS 2009 :: Strategies for Visualizing Points-of-Interest of 3D Virtual Environments on Mobile Devices :: Matthias Trapp ::
5. adaptation of 2D halo approach [Baudisch 2003]: direction ? distance ? 3D virtual environments exhibit: varying perspectives object occlusion amount of geometry and texture (more) complex interaction scene management on mobile devices: real-time rendering constraints limited device capabilities (e.g. memory, screen size, …) challenges & problems 5 :: LBS 2009 :: Strategies for Visualizing Points-of-Interest of 3D Virtual Environments on Mobile Devices :: Matthias Trapp ::
6. point-of-interest (POI) / waypoint: useful or interesting point location usually specified in 2D coordinates objects-of-interest: 3D shape that represents important building can have multiple POIs (entrances, offices…) can be (partially) outside/inside view frustum main problem: POI visualization depend on user perspective (virtual camera) 3D geometry of objects and scene points-of-interest & 3D visualization 6 :: LBS 2009 :: Strategies for Visualizing Points-of-Interest of 3D Virtual Environments on Mobile Devices :: Matthias Trapp ::
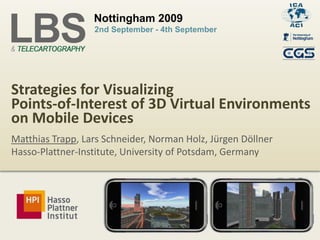
7. A: high perspective + vertical extend of building B: low perspective + vertical extend of building C: low perspective + horizontal extend of building points-of-interest & 3D visualization 7 :: LBS 2009 :: Strategies for Visualizing Points-of-Interest of 3D Virtual Environments on Mobile Devices :: Matthias Trapp ::
8. δ: compute cloud-of-interest (COIObject) for an object (set of suitable POI for visualization) σ: select ARP that represents a POI according to… object‘s shape current setting of the virtual camera use selected ARP for visualization/rendering appropriate representation point (ARP) 8 :: LBS 2009 :: Strategies for Visualizing Points-of-Interest of 3D Virtual Environments on Mobile Devices :: Matthias Trapp ::
9. 2D approaches to estimate direction & distance: halos, scaled arrows, stretched arrows experiments with four 3D approaches: 3D halo spheres (worldspace) 3D halo billboards (worldspace) 3D halo projection (screenspace) 3D halo circles (worldspace) :: LBS 2009 :: Strategies for Visualizing Points-of-Interest of 3D Virtual Environments on Mobile Devices :: Matthias Trapp :: 9 3D visualization of off-screen point-of-interests
10. :: LBS 2009 :: Strategies for Visualizing Points-of-Interest of 3D Virtual Environments on Mobile Devices :: Matthias Trapp :: 10 3D halo projection :: conceptual overview
11. :: LBS 2009 :: Strategies for Visualizing Points-of-Interest of 3D Virtual Environments on Mobile Devices :: Matthias Trapp :: 11 3D halo projection - results
12. halo projection - results 12 :: LBS 2009 :: Strategies for Visualizing Points-of-Interest of 3D Virtual Environments on Mobile Devices :: Matthias Trapp ::
13. :: LBS 2009 :: Strategies for Visualizing Points-of-Interest of 3D Virtual Environments on Mobile Devices :: Matthias Trapp :: 13 3D halo circle :: conceptual overview
14. 3D halo circle :: results 14 :: LBS 2009 :: Strategies for Visualizing Points-of-Interest of 3D Virtual Environments on Mobile Devices :: Matthias Trapp ::
15. :: LBS 2009 :: Strategies for Visualizing Points-of-Interest of 3D Virtual Environments on Mobile Devices :: Matthias Trapp :: 15 3D halo circle :: results D
16. prevent points-of-interest (targets) from being occluded by unimportant scene objects (distractors) occlusion management for points-of-interests 16 :: LBS 2009 :: Strategies for Visualizing Points-of-Interest of 3D Virtual Environments on Mobile Devices :: Matthias Trapp :: [Elmqvist 2008]
17. primary purpose: object discovery single view paradigm object-space solution environment properties: high object density, but low object complexity proximity object interaction: we choose virtual X-ray pattern :: LBS 2009 :: Strategies for Visualizing Points-of-Interest of 3D Virtual Environments on Mobile Devices :: Matthias Trapp :: 17 occlusion management for points-of-interests [Elmqvist 2008]
18. omit rendering visual representation of distractor buildings problem: noα-channel no alpha blending wire-frame style no management 18 :: LBS 2009 :: Strategies for Visualizing Points-of-Interest of 3D Virtual Environments on Mobile Devices :: Matthias Trapp ::
19. results :: occlusion management + POI visualization 19 :: LBS 2009 :: Strategies for Visualizing Points-of-Interest of 3D Virtual Environments on Mobile Devices :: Matthias Trapp ::
20. target platform for proof-of-concept implementation: iPhone 3D & iPod Touch (not limited to) dedicated GPU (PowerVR MBX Lite 3D) 128 MB RAM ( ~ 11 MB video RAM) APIs: Apple iPhone SDK developed a custom light-weight scene graph API based on OpenGL ES 1.1 (now 2.0 available) per-object view-frustum culling implementation :: overview 20 :: LBS 2009 :: Strategies for Visualizing Points-of-Interest of 3D Virtual Environments on Mobile Devices :: Matthias Trapp ::
21. implementation :: rendering at a glance 21 :: LBS 2009 :: Strategies for Visualizing Points-of-Interest of 3D Virtual Environments on Mobile Devices :: Matthias Trapp ::
22. two test data sets (medium/large) 41,032 / 56,654 vertices 624 / 5924 objects ~4/8 MB texture data performance results: implementation :: performance evaluation 22 :: LBS 2009 :: Strategies for Visualizing Points-of-Interest of 3D Virtual Environments on Mobile Devices :: Matthias Trapp ::
23. both approaches: enable distance & direction estimation exhibit visual cluttering for multiple POI but require user evaluation 3D halo projection approach: problem: POIs behind the virtual camera 3D halo circle approach : estimation becomes harder for POIs farther away open issues for occlusion management: landmark-landmark occlusion :: LBS 2009 :: Strategies for Visualizing Points-of-Interest of 3D Virtual Environments on Mobile Devices :: Matthias Trapp :: 23 discussion
24. wrap-up: approaches for 3D POI visualization rendering of simple 3D GeoVE on mobile devices limited device capabilities (memory, cpu, gpu, battery) future work: reduction of visual cluttering semi-transparent occlusion style discuss possible advantages of a POI service conclusions & future work 24 :: LBS 2009 :: Strategies for Visualizing Points-of-Interest of 3D Virtual Environments on Mobile Devices :: Matthias Trapp ::
25. thank you for your attention… questions ? Contact: Matthias Trapp matthias.trapp@hpi.uni-potsdam.de Lars Schneider lars.schneider@students.hpi.uni-potsdam.de Norman Holz norman.holz@students.hpi.uni-potsdam.de JürgenDöllner juergen.doellner@hpi.uni-potsdam.de Computer Graphics System Group www.hpi.uni-potsdam.de/3d Researchgroup 3D-Geoinformation www.3dgi.de 25 :: LBS 2009 :: Strategies for Visualizing Points-of-Interest of 3D Virtual Environments on Mobile Devices :: Matthias Trapp ::
Editor's Notes
Hello everyone and thank you very much for the introduction.Now I‘d like to presents the results of two master students, [CLICK]
Themainmotivationforourwork was to examinethe power of todays mobile devicesusingtheexample of an 3D virtualenvironment.We‘vedonethisusing a simple example of a high-ordervisualizationapproach: thevisualization of 3D points of interests.Thismeansnotonlyrendering a specificscene.
This talk mainly deal with two approaches for visualizing points-of-interests which can be located on- and offscreen.One approach is called 3D halo circle and the other 3D halo projection depicted here.We combined both approaches with a simple form of active occlusion management.[CLICK]
Before I proceed I‘d like to give a brief overview of this talk.At first, I present the problems and challenges to visualize points-of-interest in 3D geovirtual environments on mobile devices.Then I present two approaches that can accomplish this task in combination with a simple form of occlusion management.After that, I briefly describe our implementation before I discuss our approaches and conclude this talk.[CLICK]
The resulting images of this rendering can look as depicted here:Screenshot A shows the visualization of 3 points-of-interest which are located outside the current view frustum.Screenshot B shows this visualization of a point-of-interest that is on the screen and a point-of-interest that is located in the left half space behind the camera.[CLICK]
Again, I‘dliketoreferetothepaperformoredetails on that.[CLICK]
Thisvideodemonstratethedirectapplicationofthecirclevisualizationto a virtual 3D city model.Youcanrecognizetwomajorissuesatthispoint:1.2.[CLICK]
Zusammenspiel von occlusionmanagementandpoivisualization
After the main concepts are explained, I‘d like to drop some lines on the implementation.As target platform we choose Apples iPhone and iPod touch because they were available at this time.It provides a dedicated GPU with around 11 MB video memory out of 128 MB main memory.For software development Apples SDK was used, to develop a rudimentary scene graph system which is based on OpenGL 1.1.For optimizing the rendering speed, the scene graph API provides per-object view-frustum culling.[CLICK]
Let me give a brief overview of the rendering processthta is displayed here in pseudo code.The following code is executed on a per-frame basis.For each object to render, we first distinguish between visible and invisible objects.The, given all POI; occlusion management is applied to object.[CLICK]If the object is categorized as occluder, the rendering mode is changed (here: to wireframe)In the case that a object is not visible but classified as POI, [CLICK]We select the characteristic sigma and delta function and determine the ARP.Finally, we render the proxy object (projected or circle halo).
Totestourprototypicalimplementationweusetwo different synthetictestdatasets.
Thank you very much for your attention.I‘d like to welcome any questions you may have on this topic.