Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Tadahiro Taniguchi
PPTX, PDF
3,715 views
人工知能概論 15
Visit http://ai.tanichu.com/
Education
◦
Read more
8
Save
Share
Embed
Embed presentation
Download
Downloaded 63 times
1
/ 50
2
/ 50
3
/ 50
4
/ 50
5
/ 50
6
/ 50
7
/ 50
8
/ 50
9
/ 50
10
/ 50
11
/ 50
12
/ 50
13
/ 50
14
/ 50
15
/ 50
16
/ 50
17
/ 50
18
/ 50
19
/ 50
20
/ 50
21
/ 50
22
/ 50
23
/ 50
24
/ 50
25
/ 50
26
/ 50
27
/ 50
28
/ 50
29
/ 50
30
/ 50
31
/ 50
32
/ 50
33
/ 50
34
/ 50
35
/ 50
36
/ 50
37
/ 50
38
/ 50
39
/ 50
40
/ 50
41
/ 50
42
/ 50
43
/ 50
44
/ 50
45
/ 50
46
/ 50
47
/ 50
48
/ 50
49
/ 50
50
/ 50
More Related Content
PPTX
人工知能概論 8
by
Tadahiro Taniguchi
PPTX
人工知能概論 6
by
Tadahiro Taniguchi
PPTX
人工知能概論 11
by
Tadahiro Taniguchi
PPTX
人工知能概論 2
by
Tadahiro Taniguchi
PPTX
人工知能概論 4
by
Tadahiro Taniguchi
PPTX
人工知能概論 5
by
Tadahiro Taniguchi
PPTX
イラストで学ぶ人工知能概論 9
by
Tadahiro Taniguchi
PPTX
人工知能概論 7
by
Tadahiro Taniguchi
人工知能概論 8
by
Tadahiro Taniguchi
人工知能概論 6
by
Tadahiro Taniguchi
人工知能概論 11
by
Tadahiro Taniguchi
人工知能概論 2
by
Tadahiro Taniguchi
人工知能概論 4
by
Tadahiro Taniguchi
人工知能概論 5
by
Tadahiro Taniguchi
イラストで学ぶ人工知能概論 9
by
Tadahiro Taniguchi
人工知能概論 7
by
Tadahiro Taniguchi
What's hot
PPTX
人工知能概論 1
by
Tadahiro Taniguchi
PDF
駒場学部講義2018 「意識の神経科学と自由エネルギー原理」講義スライド
by
Masatoshi Yoshida
PPTX
人工知能概論 14
by
Tadahiro Taniguchi
PDF
CVIM#11 3. 最小化のための数値計算
by
sleepy_yoshi
PPTX
【DL輪読会】Prompting Decision Transformer for Few-Shot Policy Generalization
by
Deep Learning JP
PDF
機械学習の理論と実践
by
Preferred Networks
PPTX
人工知能概論 10
by
Tadahiro Taniguchi
PPTX
人工知能概論 12
by
Tadahiro Taniguchi
PDF
#FTMA15 第二回課題 鬼コースサーベイ
by
Yoichi Ochiai
PDF
データ解析13 線形判別分析
by
Hirotaka Hachiya
PDF
記号創発ロボティクスの狙い
by
Tadahiro Taniguchi
PDF
ICLR2019 読み会in京都 ICLRから読み取るFeature Disentangleの研究動向
by
Yamato OKAMOTO
PPTX
DLゼミ: Ego-Body Pose Estimation via Ego-Head Pose Estimation
by
harmonylab
PPTX
強化学習アルゴリズムPPOの解説と実験
by
克海 納谷
PPTX
人工知能概論 13
by
Tadahiro Taniguchi
PDF
解説#78 誤差逆伝播
by
Ruo Ando
PDF
第7回WBAシンポジウム:予測符号化モデルとしての 深層予測学習とロボット知能化
by
The Whole Brain Architecture Initiative
PDF
KJ法のW型問題解決モデルとU理論、それぞれの問題意識 加筆版
by
nishio
PPTX
人工知能概論 3
by
Tadahiro Taniguchi
PDF
画像生成・生成モデル メタサーベイ
by
cvpaper. challenge
人工知能概論 1
by
Tadahiro Taniguchi
駒場学部講義2018 「意識の神経科学と自由エネルギー原理」講義スライド
by
Masatoshi Yoshida
人工知能概論 14
by
Tadahiro Taniguchi
CVIM#11 3. 最小化のための数値計算
by
sleepy_yoshi
【DL輪読会】Prompting Decision Transformer for Few-Shot Policy Generalization
by
Deep Learning JP
機械学習の理論と実践
by
Preferred Networks
人工知能概論 10
by
Tadahiro Taniguchi
人工知能概論 12
by
Tadahiro Taniguchi
#FTMA15 第二回課題 鬼コースサーベイ
by
Yoichi Ochiai
データ解析13 線形判別分析
by
Hirotaka Hachiya
記号創発ロボティクスの狙い
by
Tadahiro Taniguchi
ICLR2019 読み会in京都 ICLRから読み取るFeature Disentangleの研究動向
by
Yamato OKAMOTO
DLゼミ: Ego-Body Pose Estimation via Ego-Head Pose Estimation
by
harmonylab
強化学習アルゴリズムPPOの解説と実験
by
克海 納谷
人工知能概論 13
by
Tadahiro Taniguchi
解説#78 誤差逆伝播
by
Ruo Ando
第7回WBAシンポジウム:予測符号化モデルとしての 深層予測学習とロボット知能化
by
The Whole Brain Architecture Initiative
KJ法のW型問題解決モデルとU理論、それぞれの問題意識 加筆版
by
nishio
人工知能概論 3
by
Tadahiro Taniguchi
画像生成・生成モデル メタサーベイ
by
cvpaper. challenge
Viewers also liked
PDF
ビブリオバトルにおける コミュニティ形成のダイナミクス
by
Tadahiro Taniguchi
PPTX
Rで学ぶデータサイエンス第13章(ミニマックス確率マシン)
by
Daisuke Yoneoka
PDF
コミュニケーション場のメカニズムデザイン 自律性を活かす記号過程のための制度設計
by
Tadahiro Taniguchi
PDF
Symbol emergence in robotics @ Shonan meeting 2013/11/13
by
Tadahiro Taniguchi
PDF
Os 12 記号創発ロボティクス / OS趣旨説明@JSAI2015
by
Tadahiro Taniguchi
PDF
Nonparametric Bayesian Word Discovery for Symbol Emergence in Robotics
by
Tadahiro Taniguchi
ビブリオバトルにおける コミュニティ形成のダイナミクス
by
Tadahiro Taniguchi
Rで学ぶデータサイエンス第13章(ミニマックス確率マシン)
by
Daisuke Yoneoka
コミュニケーション場のメカニズムデザイン 自律性を活かす記号過程のための制度設計
by
Tadahiro Taniguchi
Symbol emergence in robotics @ Shonan meeting 2013/11/13
by
Tadahiro Taniguchi
Os 12 記号創発ロボティクス / OS趣旨説明@JSAI2015
by
Tadahiro Taniguchi
Nonparametric Bayesian Word Discovery for Symbol Emergence in Robotics
by
Tadahiro Taniguchi
Similar to 人工知能概論 15
PDF
記号を用いたコミュニケーションを実現するために何が必要か?― 記号創発ロボティクスの 視点から ―
by
Tadahiro Taniguchi
PDF
Facebookの人工知能アルゴリズム「memory networks」について調べてみた
by
株式会社メタップスホールディングス
PPTX
LLM は言葉の意味を理解しているのか?
by
Hide Koba
PPTX
人工知能の可能性と限界
by
Youichiro Miyake
PDF
知能とは何か-AIを巡る20の質問, 岡夏樹
by
KIT Cognitive Interaction Design
PPTX
汎用人工知能について(2015-12)
by
Naoya Arakawa
PDF
Seeing Unseens with Machine Learning -- 見えていないものを見出す機械学習
by
Tatsuya Shirakawa
PDF
ロボットによる一般問題解決
by
SOINN Inc.
PPTX
survey on math transformer 2023 0628 sato
by
satoyuta0112
PDF
出版記念イベント「なぜ人工知能は人と会話ができるか?」講演資料
by
Youichiro Miyake
PDF
人工知能が啓く教育の可能性
by
Youichiro Miyake
PPTX
「なぜ人工知能は人と会話ができるか?」図
by
Youichiro Miyake
PDF
東京大学 経済学部講義 前半
by
Youichiro Miyake
PDF
人工知能をビジネスに活かす
by
Akira Shibata
PDF
人工知能技術の現状-今後の見通し-社会へのインパクト-岡夏樹
by
KIT Cognitive Interaction Design
PPTX
Neural Concept Network v0.2 (ja)
by
AkihiroYamamoto
PDF
Linguistic Knowledge as Memory for Recurrent Neural Networks_論文紹介
by
Masayoshi Kondo
PDF
Grammatical inference メモ 1
by
Keisuke OTAKI
PDF
Webマイニングと情報論的学習理論
by
Hiroshi Ono
PDF
Webマイニングと情報論的学習理論
by
Hiroshi Ono
記号を用いたコミュニケーションを実現するために何が必要か?― 記号創発ロボティクスの 視点から ―
by
Tadahiro Taniguchi
Facebookの人工知能アルゴリズム「memory networks」について調べてみた
by
株式会社メタップスホールディングス
LLM は言葉の意味を理解しているのか?
by
Hide Koba
人工知能の可能性と限界
by
Youichiro Miyake
知能とは何か-AIを巡る20の質問, 岡夏樹
by
KIT Cognitive Interaction Design
汎用人工知能について(2015-12)
by
Naoya Arakawa
Seeing Unseens with Machine Learning -- 見えていないものを見出す機械学習
by
Tatsuya Shirakawa
ロボットによる一般問題解決
by
SOINN Inc.
survey on math transformer 2023 0628 sato
by
satoyuta0112
出版記念イベント「なぜ人工知能は人と会話ができるか?」講演資料
by
Youichiro Miyake
人工知能が啓く教育の可能性
by
Youichiro Miyake
「なぜ人工知能は人と会話ができるか?」図
by
Youichiro Miyake
東京大学 経済学部講義 前半
by
Youichiro Miyake
人工知能をビジネスに活かす
by
Akira Shibata
人工知能技術の現状-今後の見通し-社会へのインパクト-岡夏樹
by
KIT Cognitive Interaction Design
Neural Concept Network v0.2 (ja)
by
AkihiroYamamoto
Linguistic Knowledge as Memory for Recurrent Neural Networks_論文紹介
by
Masayoshi Kondo
Grammatical inference メモ 1
by
Keisuke OTAKI
Webマイニングと情報論的学習理論
by
Hiroshi Ono
Webマイニングと情報論的学習理論
by
Hiroshi Ono
More from Tadahiro Taniguchi
PDF
Sci13 招待講演
by
Tadahiro Taniguchi
PDF
「知」の循環と拡張を加速する対話空間のメカニズムデザイン(JST未来社会創造事業)
by
Tadahiro Taniguchi
PDF
Semantic Segmentation of Driving Behavior Data: Double Articulation Analyzer ...
by
Tadahiro Taniguchi
PDF
Symbol Emergence in Robotics: Language Acquisition via Real-world Sensorimoto...
by
Tadahiro Taniguchi
PDF
2013年度 創発システム研究室 3回生配属ガイダンス資料
by
Tadahiro Taniguchi
PPTX
「ビブリオバトルのすすめかた」@教員向け言語能力向上研修会(書評合戦)
by
Tadahiro Taniguchi
PPTX
AML-dynamics ライスボールセミナー
by
Tadahiro Taniguchi
PDF
Designing wisdom through the web
by
Tadahiro Taniguchi
PDF
電子情報通信学会 2012年総合大会 電力問題へのさまざまなアプローチ「人工知能的アプローチ」 講演資料
by
Tadahiro Taniguchi
PPTX
ビブリオバトル2013 普及四年目のアレグレット
by
Tadahiro Taniguchi
Sci13 招待講演
by
Tadahiro Taniguchi
「知」の循環と拡張を加速する対話空間のメカニズムデザイン(JST未来社会創造事業)
by
Tadahiro Taniguchi
Semantic Segmentation of Driving Behavior Data: Double Articulation Analyzer ...
by
Tadahiro Taniguchi
Symbol Emergence in Robotics: Language Acquisition via Real-world Sensorimoto...
by
Tadahiro Taniguchi
2013年度 創発システム研究室 3回生配属ガイダンス資料
by
Tadahiro Taniguchi
「ビブリオバトルのすすめかた」@教員向け言語能力向上研修会(書評合戦)
by
Tadahiro Taniguchi
AML-dynamics ライスボールセミナー
by
Tadahiro Taniguchi
Designing wisdom through the web
by
Tadahiro Taniguchi
電子情報通信学会 2012年総合大会 電力問題へのさまざまなアプローチ「人工知能的アプローチ」 講演資料
by
Tadahiro Taniguchi
ビブリオバトル2013 普及四年目のアレグレット
by
Tadahiro Taniguchi
人工知能概論 15
1.
立命館大学 情報理工学部 知能情報学科 谷口忠大
2.
Information このスライドは「イラ ストで学ぶ人工知能概 論」を講義で活用した り,勉強会で利用した りするために提供され ているスライドです.
「イラストで学ぶ人工 知能概論」をご購入頂 けていない方は,必ず ご購入いただいてから ご利用ください.
3.
STORY まとめ ホイールダック2号は地図を持って,ダンジョンに突入 した.ホイールダック2号は宝箱を見つけ,敵をかわし, 扉を見つけて次の階,次の階へと進んでいった.ときに は道に迷うこともあった.しかし,ついにホイールダッ ク2号は迷路を抜けてスフィンクスに対峙した.
スフィンクスはホイールダック2号に謎かけを行った. ホイールダック2号は自らに備え付けられた自然言語処 理能力,論理的思考力をフル回転させて,それに答えた. スフィンクスは驚き,岩の台座から飛び降りて,海に 落ちて死んでいった. ホイールダック2号の戦いは終わった. ホイールダック2号は沈みゆく夕日を見ながら,自ら に優れた知能を授けてくれた開発者に感謝の気持ちを抱 くのであった.
4.
仮定 まとめ さて,結局,ホイールダック2号はどれだけのこと を仮定していたでしょうか.
それらの仮定はどうやったら外せるでしょうか.
5.
Contents 15.1 ホイールダック2号の冒険:総集編
15.2 身体の知 15.3 記号の知 15.4 人工知能と未来
6.
リプレイ:探索 ホイールダック2号は地図を持って,洞窟に突入し た. まずは,とにかくアイテムの入った宝箱を見つけな ければならない.ホイールダック2号は解探索の手 法を用いて,迷路の1階をくまなく探した.アイテ ムを見つけたホイールダック2号は最短経路探索を 用いてゴールに向かった.
途中,敵と遭遇することもあったがミニマックス戦 略を用いて自らの被害は最小に留めた.
7.
リプレイ:多段決定 2階は時間的に変化する通路があり,また,時間と ともにダメージを受ける環境だった.何よりも急い で宝箱を探してゴールする必要がある.ホイール ダック2号は動的計画法を用いてゴールまでを駆け 抜けた. 3階には地図が無かった.試行錯誤しか無い.何度も 失敗したが,強化学習により,徐々にゴールに近づ けるようになり,3階もクリアすることができた.
8.
リプレイ:位置推定 何かの拍子に,自分の位置がわからなくなってしま うと,いくら地図があったからといって,どうしよ うもない. ホイールダック2
号は過去に見てきた周囲の情報と 自らの行動履歴の情報をベイズフィルタにより統合 することにより,自らの地図上の位置を推定するこ とができた. 実際には粒子フィルタとして実装された.
9.
リプレイ:学習と認識 この間,宝箱やゴールの認識にはクラスタリングに もとづいて得られた概念が用いられた.また,宝箱 の中には微妙に形が違う「罠」の入った宝箱もあっ たが,これはパターン認識技術を用いて判別した.
10.
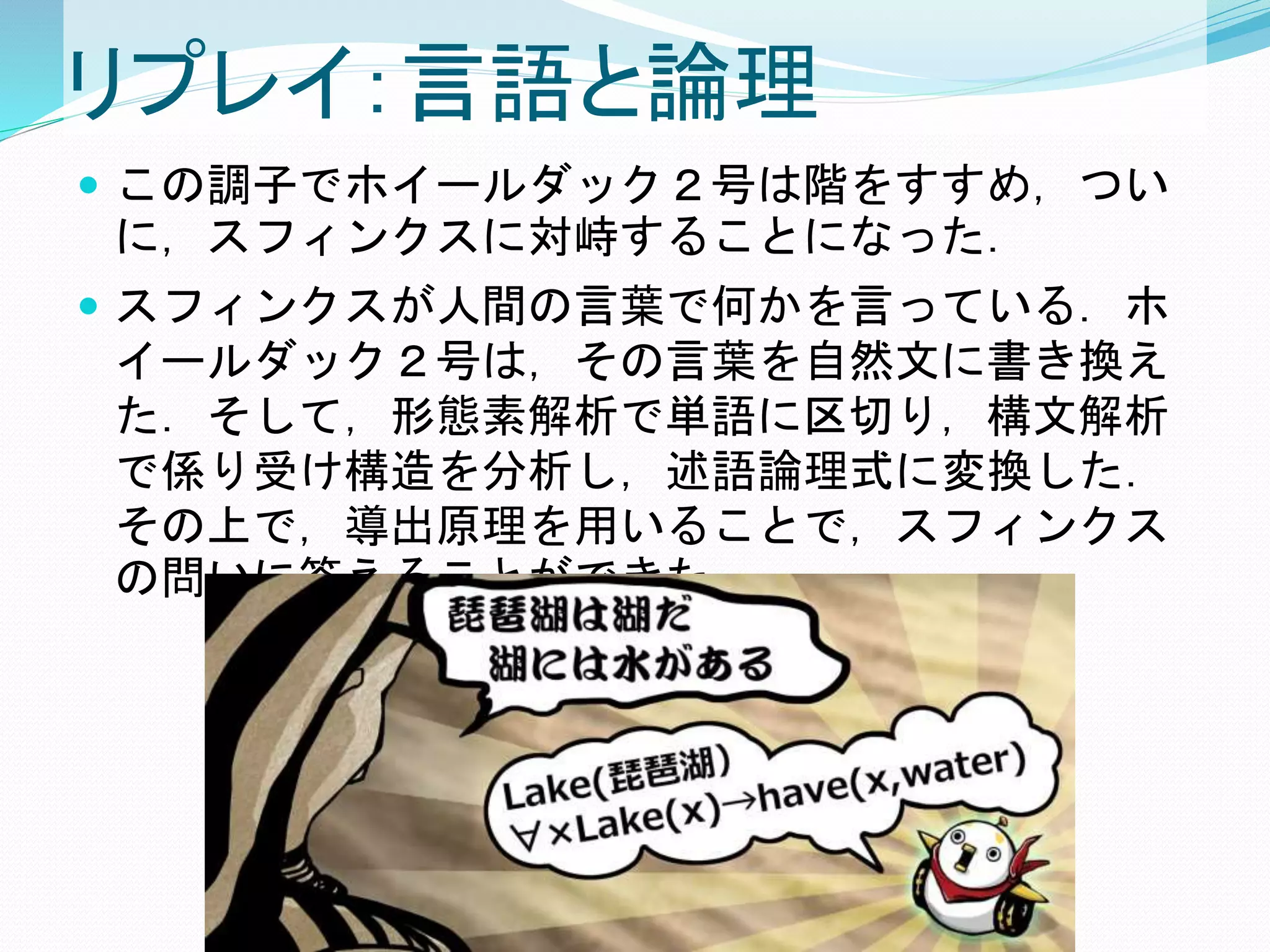
リプレイ:言語と論理 この調子でホイールダック2号は階をすすめ,つい に,スフィンクスに対峙することになった. スフィンクスが人間の言葉で何かを言っている.ホ イールダック2号は,その言葉を自然文に書き換え た.そして,形態素解析で単語に区切り,構文解析 で係り受け構造を分析し,述語論理式に変換した. その上で,導出原理を用いることで,スフィンクス の問いに答えることができた.
11.
リプレイ:ラストバトル スフィンクスは驚き,岩の台座から飛び降りて,海 に落ちて死んだ. ホイールダック2号は見事自らの知能で,スフィン クスに打ち勝ったのである.
おめでとうホイールダック2号!
12.
15.1.2 「仮定」と人工知能の開発 さて,結局,ホイールダック2号はどれだけのこと を仮定していたでしょうか?
それらの仮定はどうやったら外せるでしょうか? ex. 地図の存在->SLAM, 辞書の存在->教師なし言語獲 得, 離散的状態空間の存在 -> 連続空間への拡張,記 号化 「何かを仮定して,何かを作る.」 これこそ工学の本質. そして,仮定を外していく度に, 知能に近づいていける. SLAM = Simultaneous Localization and Mapping (地図と自己位置の同時推定)
13.
Contents 15.1 ホイールダック2号の冒険:総集編
15.2 身体の知 15.3 記号の知 15.4 人工知能と未来
14.
1960-70年代のGOFAI研究への批判 GOFAI Good
Old Fashioned AI (古き良き時代のAI) 述語論理,意味ネットワーク,プロダクションシス テム,エキスパートシステム,and so on. 現実世界に繋がっていない「記号システム」の中で の情報処理を主な問題としていた. 頭でっかちなAI ※知能における身体の意義を軽視してきた.
15.
15.2.1 物理記号システム仮説 とプロダクションシステム プロダクションシステム
手続き的知識の表現法 外界を記号表現し,if-thenルールを適用していくこと で,問題解決を図る. 実世界で機敏に動けなかった.
16.
ロドニー・ブルックスのNewAI 1986年の論文を皮切りとして、彼のロボッ ト工学関連の業績は学界に多大な影響を与 え、人工知能の研究の方向性にも影響を与 えた。 彼は、ゴットロープ・フレーゲに端を発す るアラン・チューリング以来の記号処理ア プローチによる知的機械の実現には強く反 対の立場をとっている。
代わりにブルックスは生物学に発想を求め たロボット的アーキテクチャ(サブサンプ ション・アーキテクチャ)を提唱した。 ブルックスの知能ロボッ ト論―なぜMITのロボット は前進し続けるのか?
17.
現実は動的であり 不確実であり多様である. 表象主義のアプローチで作ら れたロボットは,現実では上 手く動かなかった. 扉,ブロック,壁・・・・ production rule
-> 前進 その結果,扉までの距離が変化 扉,ブロック,壁・・・・人・・・ ・・・あれ? 完全に世界を記述する.できるという視点が不完全. 遅い
18.
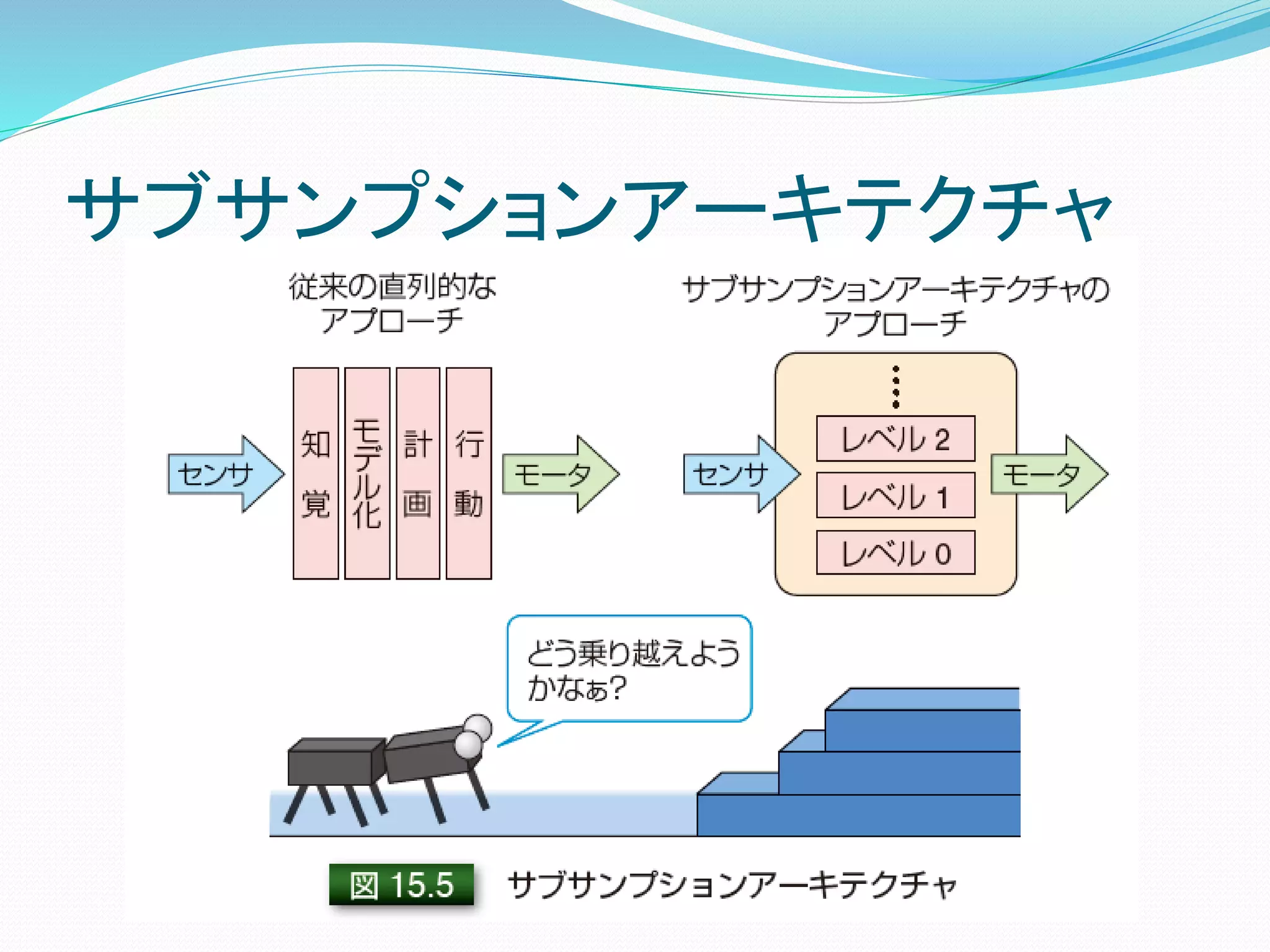
サブサンプションアーキテクチャ
19.
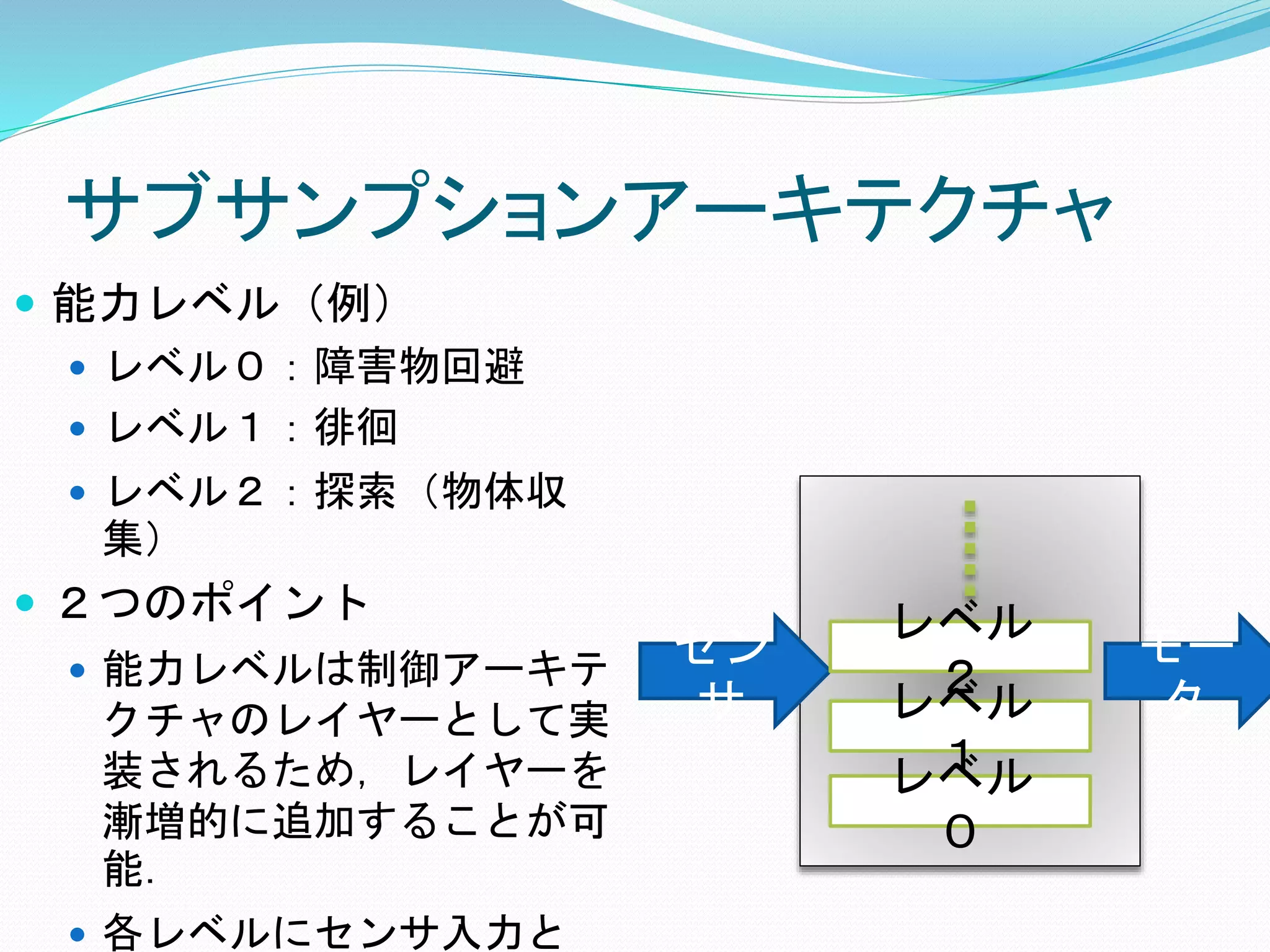
サブサンプションアーキテクチャ 能力レベル(例) レベル0:障害物回避
レベル1:徘徊 レベル2:探索(物体収 集) 2つのポイント 能力レベルは制御アーキテ クチャのレイヤーとして実 装されるため,レイヤーを 漸増的に追加することが可 能. 各レベルにセンサ入力と セン サ モー タ レベル 0 レベル 1 レベル 2
20.
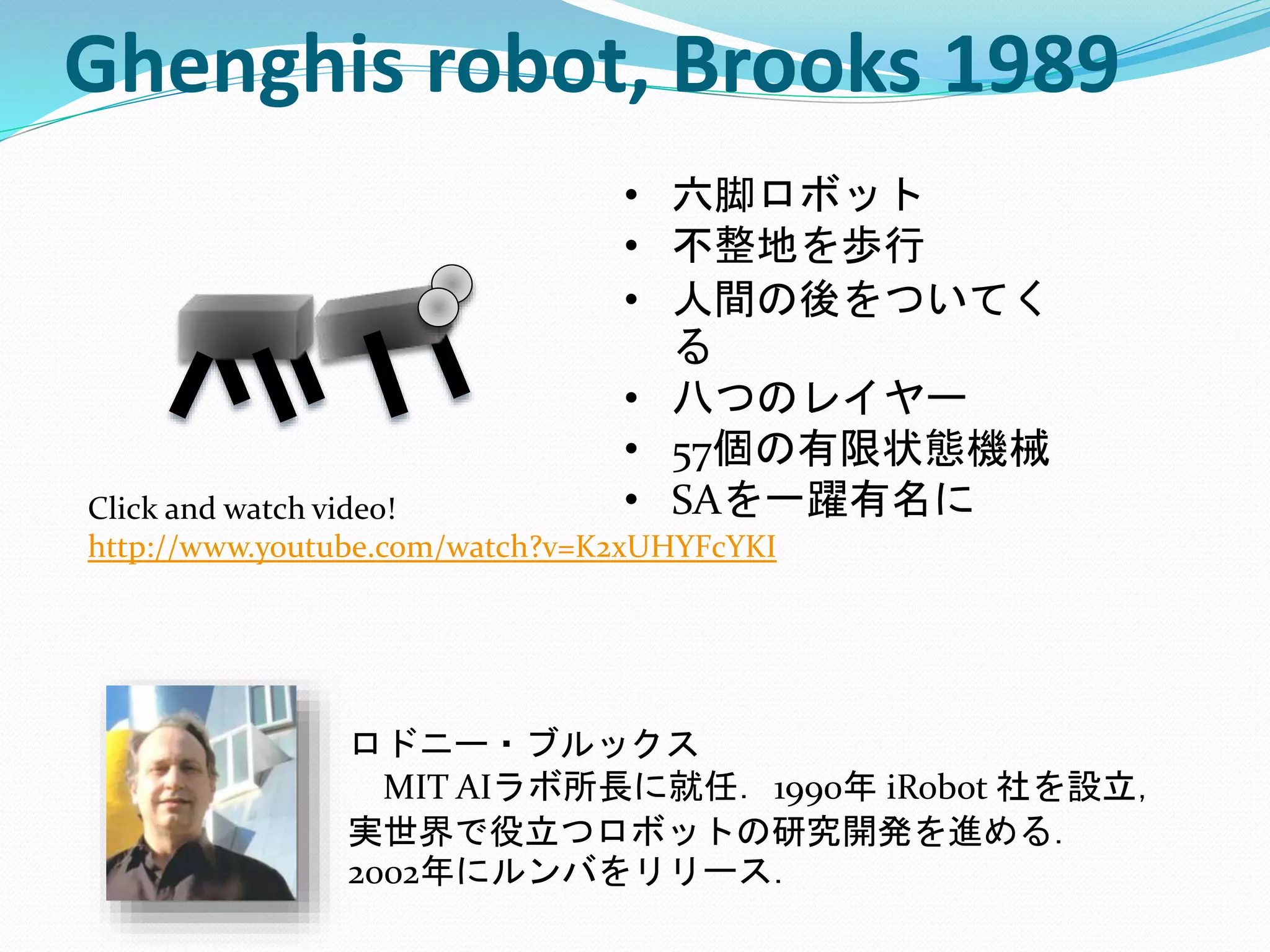
Ghenghis robot, Brooks
1989 Click and watch video! http://www.youtube.com/watch?v=K2xUHYFcYKI • 六脚ロボット • 不整地を歩行 • 人間の後をついてく る • 八つのレイヤー • 57個の有限状態機械 • SAを一躍有名に ロドニー・ブルックス MIT AIラボ所長に就任.1990年 iRobot 社を設立, 実世界で役立つロボットの研究開発を進める. 2002年にルンバをリリース.
21.
演習15-1 人間を他の動物と分かつもの 以下の内,人間と他の動物種を区別するものと して,最も「適当でない」とものはどれか? 1.
言語を操る能力 2. お金を扱う能力 3. 宗教を持つ能力 4. 二足歩行する能力
22.
受動歩行機械 受動歩行機械 適切な身体さえもてば, 機械は歩行を行うこと ができる.
CPUもモータも必要な い. VIDEO https://www.youtube.c om/watch?v=m14J1_pP yEs
23.
人工生命 進化の計算モデル 人工生命の研究では遺伝的アルゴリズム,遺伝的プロ グラミングをはじめとする進化をモデル化する手法が 考案され,生物的な振る舞いを創発的に生みだしうる ことを示した.
カール・シムズの仮想生命 Karl Sims - Evolved Virtual Creatures, Evolution Simulation, 1994 https://www.youtube.com/watch?v=JBgG_VSP7f8 仮想生命は環境との相互作用を通して,徐々に環境に 適した身体と行動方策を獲得していった.
24.
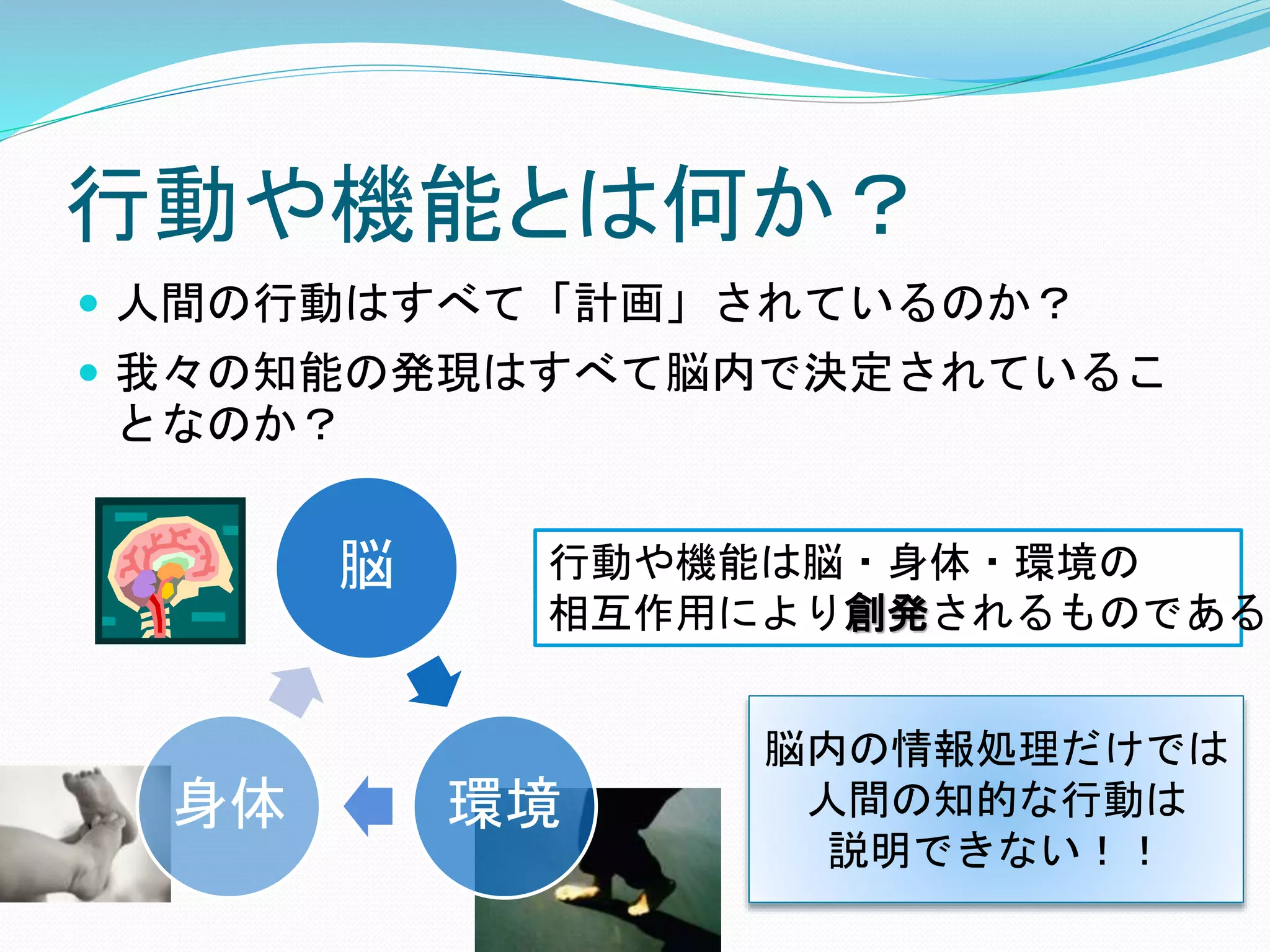
行動や機能とは何か? 人間の行動はすべて「計画」されているのか? 我々の知能の発現はすべて脳内で決定されているこ となのか? 脳 環境身体 行動や機能は脳・身体・環境の 相互作用により創発されるものである. 脳内の情報処理だけでは 人間の知的な行動は 説明できない!!
25.
演習15-2 脳,身体,環境の相互作用からの行動・機能の創発 の事例として最も不適切なものを選べ. ① プロダクションシステムにおける問題解決 ②
人間が物体を把持する動作 ③ 二足歩行動作 ④ 強化学習を用いた起き上がり挙動の学習
26.
Contents 15.1 ホイールダック2号の冒険:総集編
15.2 身体の知 15.3 記号の知 15.4 人工知能と未来
27.
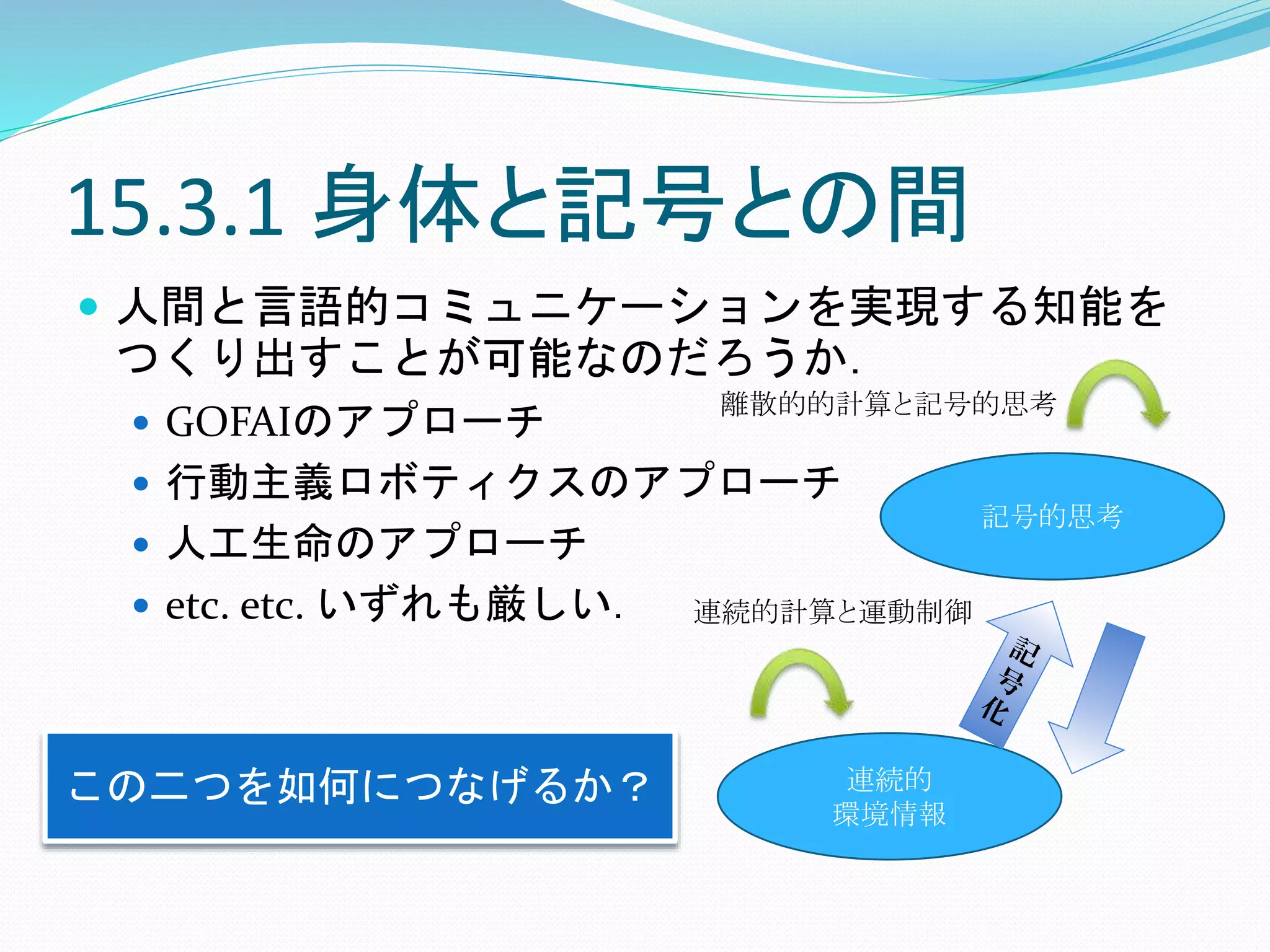
15.3.1 身体と記号との間 人間と言語的コミュニケーションを実現する知能を つくり出すことが可能なのだろうか.
GOFAIのアプローチ 行動主義ロボティクスのアプローチ 人工生命のアプローチ etc. etc. いずれも厳しい. この二つを如何につなげるか? 連続的 環境情報 記号的思考 連続的計算と運動制御 離散的的計算と記号的思考
28.
知識の表現形式 単語の意味の表現形式 前節までの自然言語処理での解析は主に文の構造,文 法に関するものであり,単語の意味に触れるものでは ない.
それぞれの単語が何の意味を持つものなのか,これを 理解するために,私達は辞書を使うが,それに相当す るものとして意味ネットワークなどの手法がある. 知識のタイプ 手続き的知識 (procedural knowledge) 「もし~であれば,~である」というように問題解決の手 続きを記述した知識. Howに対応. プロダクションシステムなどで表現 宣言的知識 (declarative knowledge) 「・・・である」というように,ある事象を宣言的に記述 した知識.Whatに対応.
29.
15.3.2 意味ネットワークとフレーム理論 意味ネットワーク(semantic
network) 知識を概念(concept)とそれらを結ぶ関係(relation) で記述することによって表現する. 概念はその性質を示す属性情報を持ち,属性は具体 的な値をとることにより,概念が実体(instance)とし て存在する.
30.
階層構造(hierarchy) 概念の階層構造を表現するために,以下のような関 係が用いられる. is_a:
上位-下位の関係を表現 上位概念の持つ性質は基本的には下位概念にも受け継がれ るという性質の継承を持つ. ex) 「動物」は「鳥」の上位概念 has_a: 部分-全体の関係を表現 概念を構成する要素とその概念との関係を示す.性質の継 承は存在しない. ex) 「手」は「人」の部分である.
31.
意味ネットワークにおける継承 田中は二足歩行する. 手は透明・・・・ではない. 人間 サラリーマ ン 田中
山本 経営者 手 指 島本 has-a has-a is-a is-a is-a is-a is-a 二足歩行 do 爪 has-a color 透明
32.
意味ネットワークの特徴 利点 有向グラフによるネットワーク表示により視覚的に知識を 表現することができるため,人が直感的に理解しやすい.
知識の追加・変更が比較的容易である. 概念の階層関係を定義することにより,概念が持つ属性の 継承を階層関係において実現することができ,複雑な知識 の構造化を実現できる. 欠点 推論規則を対象領域ごとに用意する必要がある. 知識の量が多くなると管理が難しくなる. 概念や関係の定義が任意であり,知識表現としての統一性 が保証されない. フレーム表現やオントロジーなどが開発されたが根本的にはよく似て いる
33.
演習15-3 意味ネットワーク 以下の知識を意味ネットワークで表現せよ.
関係としてはis_a関係,has_a関係,do関係を用いよ. 「鳥は飛ぶ」 「鳥は動物である」 「カモメは鳥である」 「ニワトリは鳥である」 「人間は動物である」 「人間は足を持つ」 「山田は人間である」 「人間は歩く」
34.
15.3.3 記号接地問題と「認知的な閉じ」 記号接地問題
記号システム内のシンボルがどのようにして実世界の 意味と結びつけられるかという問題.ハルナド (Harnad)によって1990年の論文で命名された。 ペンギン・・・??
35.
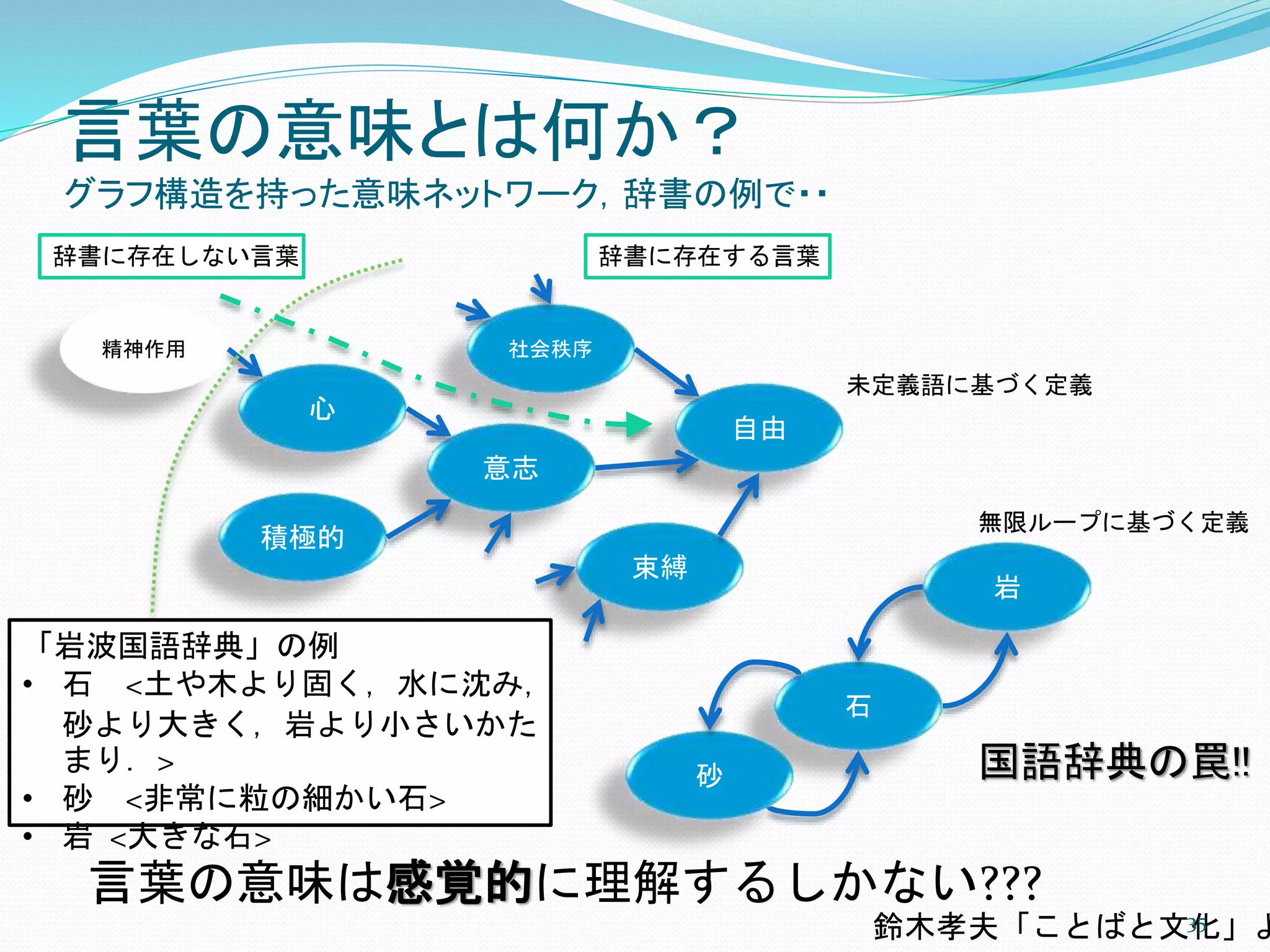
言葉の意味とは何か? グラフ構造を持った意味ネットワーク,辞書の例で・・ 自由 束縛 意志 社会秩序 心 積極的 精神作用 辞書に存在しない言葉 辞書に存在する言葉 石 砂 岩 未定義語に基づく定義 無限ループに基づく定義 言葉の意味は感覚的に理解するしかない??? 国語辞典の罠!! 「岩波国語辞典」の例 • 石
<土や木より固く,水に沈み, 砂より大きく,岩より小さいかた まり.> • 砂 <非常に粒の細かい石> • 岩 <大きな石> 鈴木孝夫「ことばと文化」よ35
36.
15.3.4 マルチモーダルカテゴリゼーション 視覚・聴覚・触覚情報を用いた物体のカテゴリ ゼーションが提案されている.
確率モデルLatent Dirichlet Allocation (LDA)の拡張 教師なしでカテゴリ分類し物体概念を形成 マルチモーダル情報を分類する事で人の感覚に即した 物体概念が形成可能 ぬいぐるみ、マラカス、ボール、etc… 物体カテゴリ 長井隆行, 中村友昭:マルチモーダルカテゴリゼーション —経験を通して概念を形成し言葉の意味を理解 するロボットの実現に向けて,人工知能学会誌,27(2012)555-562.
37.
ロボットによるカテゴリ形成実験[Nakamura ‘11] マルチモーダル情報は 全てロボットにより取得 見 る 握 る 振 る •
視覚情報 PCA SIFT (36次元) 500次元のHG • 聴覚情報 MFCC (13次元) 50次元のHG • 触覚情報 センサー値の変化情報(2次元) 15次元HG Tomoaki Nakamura, Takayuki Nagai, and Naoto Iwahashi, "Multimodal Categorization by Hierarchical Dirichlet Process", IROS2011, pp.1520-1525
38.
実験結果 ぬいぐるみ 野菜のおもちゃ 鈴入り人形 マラカス
スポンジボール ガラガラ カップ 積み木 ペットボトル ゴム製人形 マルチモーダルな情報の統合によって 多くの被験者と同様なカテゴリ分類を自動的に形成した. ロボットが「感覚的」に物体概念を獲得した?
39.
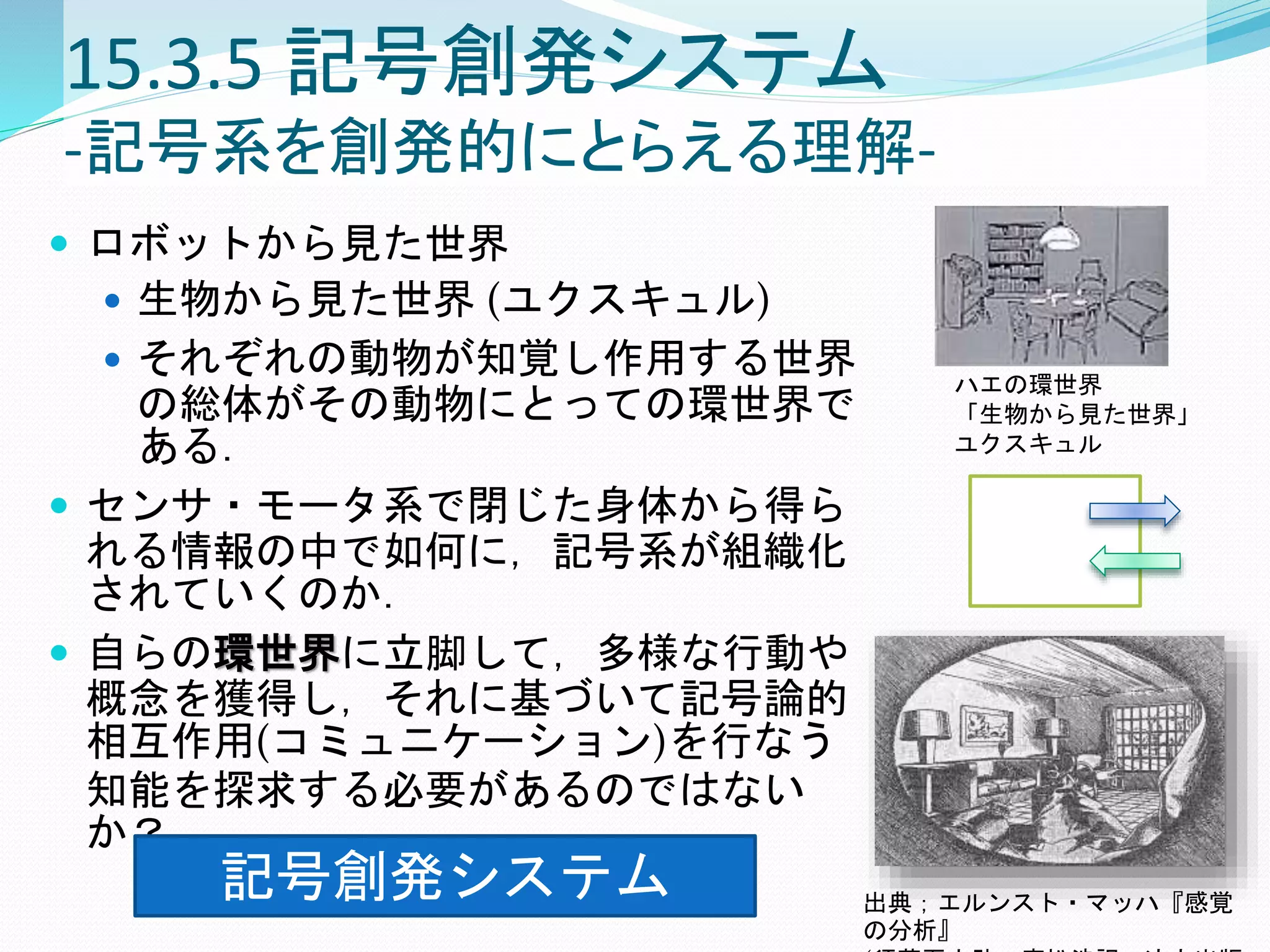
15.3.5 記号創発システム -記号系を創発的にとらえる理解- ロボットから見た世界
生物から見た世界 (ユクスキュル) それぞれの動物が知覚し作用する世界 の総体がその動物にとっての環世界で ある. センサ・モータ系で閉じた身体から得ら れる情報の中で如何に,記号系が組織化 されていくのか. 自らの環世界に立脚して,多様な行動や 概念を獲得し,それに基づいて記号論的 相互作用(コミュニケーション)を行なう 知能を探求する必要があるのではない か? 出典;エルンスト・マッハ『感覚 の分析』 ハエの環世界 「生物から見た世界」 ユクスキュル 記号創発システム
40.
記号創発ロボティクス 人工知能学会誌 特集号 2012/11
「記号創発ロボティクス」 の扉絵
41.
Contents 15.1 ホイールダック2号の冒険:総集編
15.2 身体の知 15.3 記号の知 15.4 人工知能と未来
42.
人工知能・ロボット研究者の 二つの立場 工学重視 人間理解重視 ・ とにかく憧れのロボットを作りたい. ・
便利な機械を作りたい. ・ 人工知能は使えてナンボ! ・ 人間の知能を理解したい. ・ ロボットを作るのはその検討のた ・ 人間や動物を模倣できてナンボ! 構成論的アプローチしばしば同じで,しばしば違う
43.
発達する知能 環境に適応し多様な概念や行動を獲得する知能 人間は生まれた時,未分 化な認識世界の中で活動 を始める. 環境適応の中で様々な概 念や行動を獲得していく.
そして言語を用いたコ ミュニケーションをも可 能にする. その構造,計算論的プロ セスを知りたい.
44.
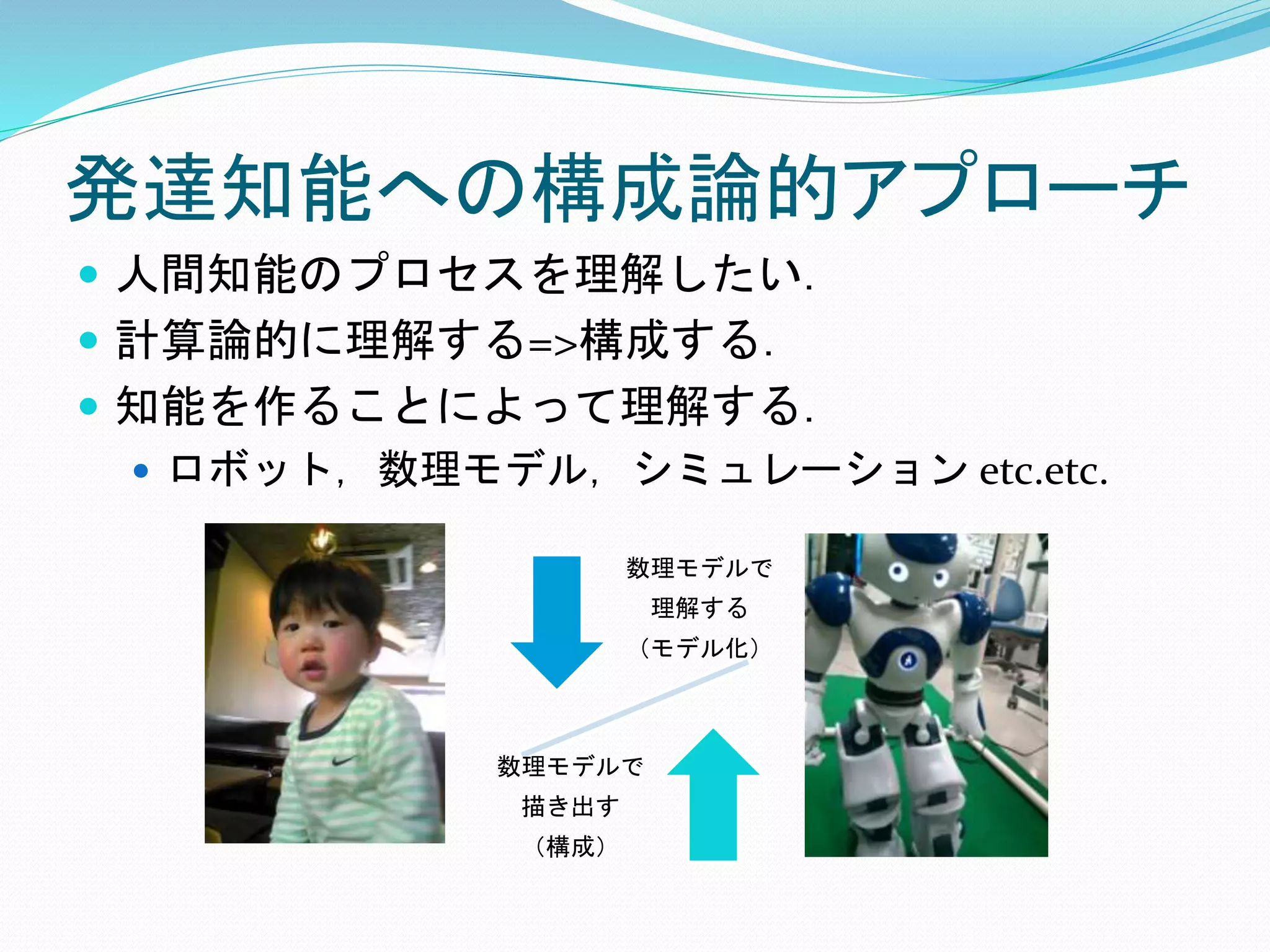
発達知能への構成論的アプローチ 人間知能のプロセスを理解したい. 計算論的に理解する=>構成する.
知能を作ることによって理解する. ロボット,数理モデル,シミュレーション etc.etc. 数理モデルで 理解する (モデル化) 数理モデルで 描き出す (構成)
45.
構成論的アプローチとは? 実際の車を分解してみる? ミニチュアモデル ラジコンでも作ってみる? 「知能」の仕組みを 理解したい 「クルマ」の仕組みを 理解したい •
実際の人間で実験してみる? • 同じ事できるロボットでも 作ってみる? 人工知能研究は「便利なものを作る」ためだけのもの じゃない
46.
15.4.2 自律的な知能と道具としての知能 自律的な知能 道具としての知能
自律的な存在としての知的 さ 「2歳児スゴイ!」 「人間はこういうふうに知 識獲得しているはずだ!」 利用価値のある知的さ 「便利!」 「これは製品化できる!」
47.
演習15-4 構成論的アプローチ 構成論的アプローチの説明として最も不適切なもの を選べ. ①
人間の知能を知るためにロボットをつくる. ② 人間の行う行動の一つを可能にするプログラムを作 成すること. ③ 構成することにのみ関心を持つ.人間の知能との関 係性を考えることは研究の態度を不純にするために, 望まれない. ④ 人工知能の研究のみでとられるアプローチではなく, 広く他の領域でも扱われることがある.
48.
15.4.3 これから 学ぶ上で
境界を一切気にせずに境界を超えて学びを進めること こそ,人工知能に関する学びの本質である. 21世紀:不確実性,言語を操る情報技術の進展 現実の知能が扱う程度に複雑な大量データ (Big Data ??) WEB, クラウド,安価なセンサ,広大なメモリ空間,計算資 源 確率的情報処理の進化: ベイズ理論(グラフィカルモデル,ノンパラメトリックベ イズ理論),マルコフ連鎖モンテカルロ法,など 安価で統合的なオープンソース知能情報処理環境の充 実
49.
まとめ 人工知能の学習および研究における「仮定」の重要性につ いて学んだ. プロダクションシステムの概要について学んだ.
サブサンプションアーキテクチャと受動歩行機械,人工生 命における身体の進化について紹介し,知能における身体 の重要性について学んだ. 意味ネットワークによる記号の意味定義の方法について学 んだ. 「自律的な知能」の実現と「道具としての知能」の実現と いう人工知能研究における二つの方向性について理解した.
50.
おつかれさまでした. “When will they
come??? It depends on all of you!!!!” 「彼らは何時やってくるのだろう? それは,人工知能を学んだ 君たち次第だ」 谷口忠大「記号創発ロボティクス」 (講談社メチエ)2014
Download





















![ロボットによるカテゴリ形成実験[Nakamura ‘11]
マルチモーダル情報は
全てロボットにより取得
見
る
握
る
振
る
• 視覚情報 PCA SIFT (36次元) 500次元のHG
• 聴覚情報 MFCC (13次元) 50次元のHG
• 触覚情報 センサー値の変化情報(2次元) 15次元HG
Tomoaki Nakamura, Takayuki Nagai, and Naoto Iwahashi, "Multimodal Categorization by
Hierarchical Dirichlet Process", IROS2011, pp.1520-1525](https://image.slidesharecdn.com/15-150410110947-conversion-gate01/75/15-37-2048.jpg)