13
4方向に力を加えた場合の評価実験結果
全被験者における平均推定誤差
軸方向 指の姿勢情報考慮有 指の姿勢情報考慮無
x0.661N 0.865N
y 1.002N 1.077N
z 1.071N 1.294N
ある被験者における3次元接触力推定結果
平均推定誤差の数値比較
0
0.5
1
1.5
2
X Axis Y Axis Z Axis
MeanError[N]
Pressure Direction
Estimated by our method
Estimated only by skin deformation
p<0.05
p<0.05
p<0.05
14.
14
4方向に力を加えた場合の評価実験結果
全被験者における平均推定誤差
軸方向 指の姿勢情報考慮有 指の姿勢情報考慮無
x0.661N 0.865N
y 1.002N 1.077N
z 1.071N 1.294N
ある被験者における3次元接触力推定結果
0
0.5
1
1.5
2
X Axis Y Axis Z Axis
MeanError[N]
Pressure Direction
Estimated by our method
Estimated only by skin deformation
平均推定誤差の数値比較
15.
15
ランダムに力を加えた場合の評価実験結果
全被験者における平均推定誤差 ある被験者における3次元接触力推定結果
軸方向 指の姿勢情報考慮有指の姿勢情報考慮無
x 0.657N 0.847N
y 0.943N 1.050N
z 1.179N 1.411N
平均推定誤差の数値比較
0
0.5
1
1.5
2
X Axis Y Axis Z Axis
MeanError[N]
Pressure Direction
Estimated by our method
Estimated only by skin deformation
p<0.05
p<0.05
p<0.05

![• 物体に触れた際の指先接触
力の計測
• 製品の指動作におけるユー
ザビリティ評価に応用
• 日用品の持ち方
• ボタン操作
• スクリーン操作
• スポーツ分野での技術指導
• ボールの持ち方
• ラケットの握り方
2
[1] https://www.chaku2.jp/contents/wp-content/uploads/2018/01/No-10.jpg(2018/8/23閲覧)
[2] http://torendo.org/wp-content/uploads/2013/10/2si-mu.jpg?75ff01(2018/0906閲覧)
背景:指先の接触力測定
製品に対する指動作[1]
スポーツ分野での指動作[2]](https://image.slidesharecdn.com/vrsjac2018touchlog-forslideshare-181119112805/85/23-2-320.jpg)
![• 接触面にセンサをつけることで接触力を計測
• 測定する対象ごとに取り付ける手間
• 対象と指の間にセンサをつけることによる触感の変化
3
従来手法:接触面にセンサを配置
[3] https://www.nitta.co.jp/product/sensor/conformat/ (2018/9/6閲覧)
[4] https://www.nitta.co.jp/product/sensor/4256e/(2018/9/6閲覧)
接触対象物にセンサを設置する計測[3] 指にセンサを設置する計測[4]](https://image.slidesharecdn.com/vrsjac2018touchlog-forslideshare-181119112805/85/23-3-320.jpg)
![接触力の急激な変化に弱い
4
従来手法:指先の変化を計測
爪色を計測する手法[5] 指腹の変形を計測する手法[6]
[5] Mascaro, S. and Asada, H.: Finger Posture and Shear Force Measurement using Fingernail Sensors: Initial Experimentation. IEEE International Conference on
Robotics & Automation. 2001.
[6] 中谷正史,川副智行.触感の感性評価ツール:ウェアラブル触動作センサ HapLog.日本ロボット学会誌,Vol.30,No. 5,pp. 499-501,2012.
• 指先の変化を計測することで接触力を推定
• 対象と指の間には何も存在しないため,触感は変化しない.
• 対象ごとに取り付ける手間がない.
3次元接触力を推定には未着手](https://image.slidesharecdn.com/vrsjac2018touchlog-forslideshare-181119112805/85/23-4-320.jpg)
![• 指腹側面の変形を反射型の光センサ(フォトリフレク
タ)で取得することによって3次元接触力を計測する研
究[7]
• 指の入射角度を考慮することで指腹接触力の推定精度が
向上する可能性
5
[7] 久能若葉,河合航,杉本麻樹,杉浦裕太.反射型光センサを用いた指腹の変形計測による接触力の推定.SIG-DeMO.2017.
当研究グループの先行研究
皮膚変形計測による接触圧推定 デバイスの外観
Photo-reflective
sensor
nail
grand
finger
force](https://image.slidesharecdn.com/vrsjac2018touchlog-forslideshare-181119112805/85/23-5-320.jpg)

![• ひずみゲージ式の3軸力覚センサ
• 接触面に発生する3分力(x, y, z)の計測が可能
• 接触面との距離を測るために,ロードセルの上に薄
い板を配置
9
[8] http://www.tecgihan.co.jp/products/3axis-force-sensor/ (2018/7/2閲覧)
ロードセル(小型3軸力覚センサ)
小型3軸力覚センサ[8] 今回使用したロードセルの様子](https://image.slidesharecdn.com/vrsjac2018touchlog-forslideshare-181119112805/85/23-9-320.jpg)

![13
4方向に力を加えた場合の評価実験結果
全被験者における平均推定誤差
軸方向 指の姿勢情報考慮有 指の姿勢情報考慮無
x 0.661N 0.865N
y 1.002N 1.077N
z 1.071N 1.294N
ある被験者における3次元接触力推定結果
平均推定誤差の数値比較
0
0.5
1
1.5
2
X Axis Y Axis Z Axis
MeanError[N]
Pressure Direction
Estimated by our method
Estimated only by skin deformation
p<0.05
p<0.05
p<0.05](https://image.slidesharecdn.com/vrsjac2018touchlog-forslideshare-181119112805/85/23-13-320.jpg)
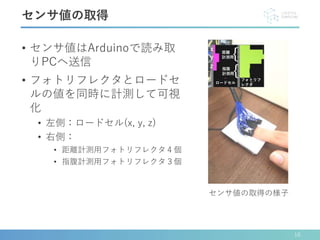
![14
4方向に力を加えた場合の評価実験結果
全被験者における平均推定誤差
軸方向 指の姿勢情報考慮有 指の姿勢情報考慮無
x 0.661N 0.865N
y 1.002N 1.077N
z 1.071N 1.294N
ある被験者における3次元接触力推定結果
0
0.5
1
1.5
2
X Axis Y Axis Z Axis
MeanError[N]
Pressure Direction
Estimated by our method
Estimated only by skin deformation
平均推定誤差の数値比較](https://image.slidesharecdn.com/vrsjac2018touchlog-forslideshare-181119112805/85/23-14-320.jpg)
![15
ランダムに力を加えた場合の評価実験結果
全被験者における平均推定誤差 ある被験者における3次元接触力推定結果
軸方向 指の姿勢情報考慮有 指の姿勢情報考慮無
x 0.657N 0.847N
y 0.943N 1.050N
z 1.179N 1.411N
平均推定誤差の数値比較
0
0.5
1
1.5
2
X Axis Y Axis Z Axis
MeanError[N]
Pressure Direction
Estimated by our method
Estimated only by skin deformation
p<0.05
p<0.05
p<0.05](https://image.slidesharecdn.com/vrsjac2018touchlog-forslideshare-181119112805/85/23-15-320.jpg)
![16
ランダムに力を加えた場合の評価実験結果
全被験者における平均推定誤差 ある被験者における3次元接触力推定結果
0
0.5
1
1.5
2
X Axis Y Axis Z Axis
MeanError[N]
Pressure Direction
Estimated by our method
Estimated only by skin deformation
軸方向 指の姿勢情報考慮有 指の姿勢情報考慮無
x 0.657N 0.847N
y 0.943N 1.050N
z 1.179N 1.411N
平均推定誤差の数値比較](https://image.slidesharecdn.com/vrsjac2018touchlog-forslideshare-181119112805/85/23-16-320.jpg)
![• 目的:指腹側面の皮膚変形計測に加えて指の接触対
象との距離を計測することで,指にかかる接触力の
推定の向上を確認すること
• 結果:指の姿勢情報を加えることでx,y,z軸で接
触力の推定精度が向上
18
まとめ
0
0.5
1
1.5
2
X Axis Y Axis Z Axis
MeanError[N]
Pressure Direction
Estimated by our method
Estimated only by skin deformation
p<0.05
p<0.05
p<0.05
指先の皮膚変形と姿勢計測による接触力推定の検討
齋藤彩音,久能若葉,杉浦裕太](https://image.slidesharecdn.com/vrsjac2018touchlog-forslideshare-181119112805/85/23-18-320.jpg)














![[FIT2025 トップコンファレンスセッション]EarHover: ヒアラブルデバイスにおける音漏れ信号を用いた空中ジェスチャ認識](https://cdn.slidesharecdn.com/ss_thumbnails/fit2025-presentationv2-251006033725-c7651715-thumbnail.jpg?width=640&height=640&fit=bounds)













