The document presents findings from the 36th International Conference on Ocean, Offshore and Arctic Engineering, detailing the methodology and results of hybrid testing on the OC5 floating offshore wind turbine. It discusses real-time hydrodynamic and aerodynamic force measurements, comparing experimental data with numerical models, and emphasizes the importance of data for future experimental campaigns. Conclusions indicate the successful validation of hydrodynamic models and the adaptive approach for improvements in testing and hardware systems.
![Ilmas Bayati, PhD.
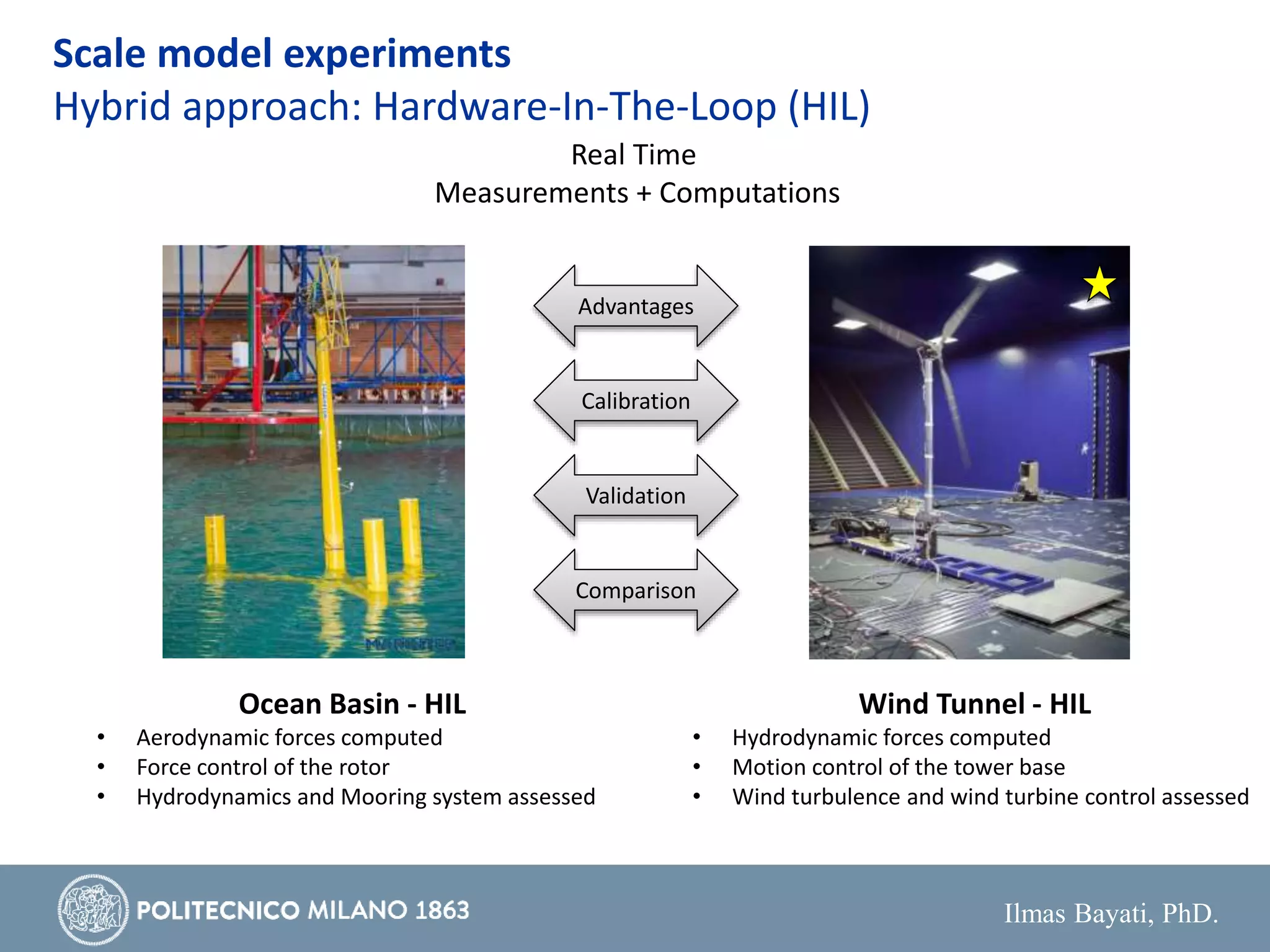
Floating Wind Turbines Wind Tunnel Testing:
Hardware(Software)-In-The-Loop approach
Floater Dynamics Simulation
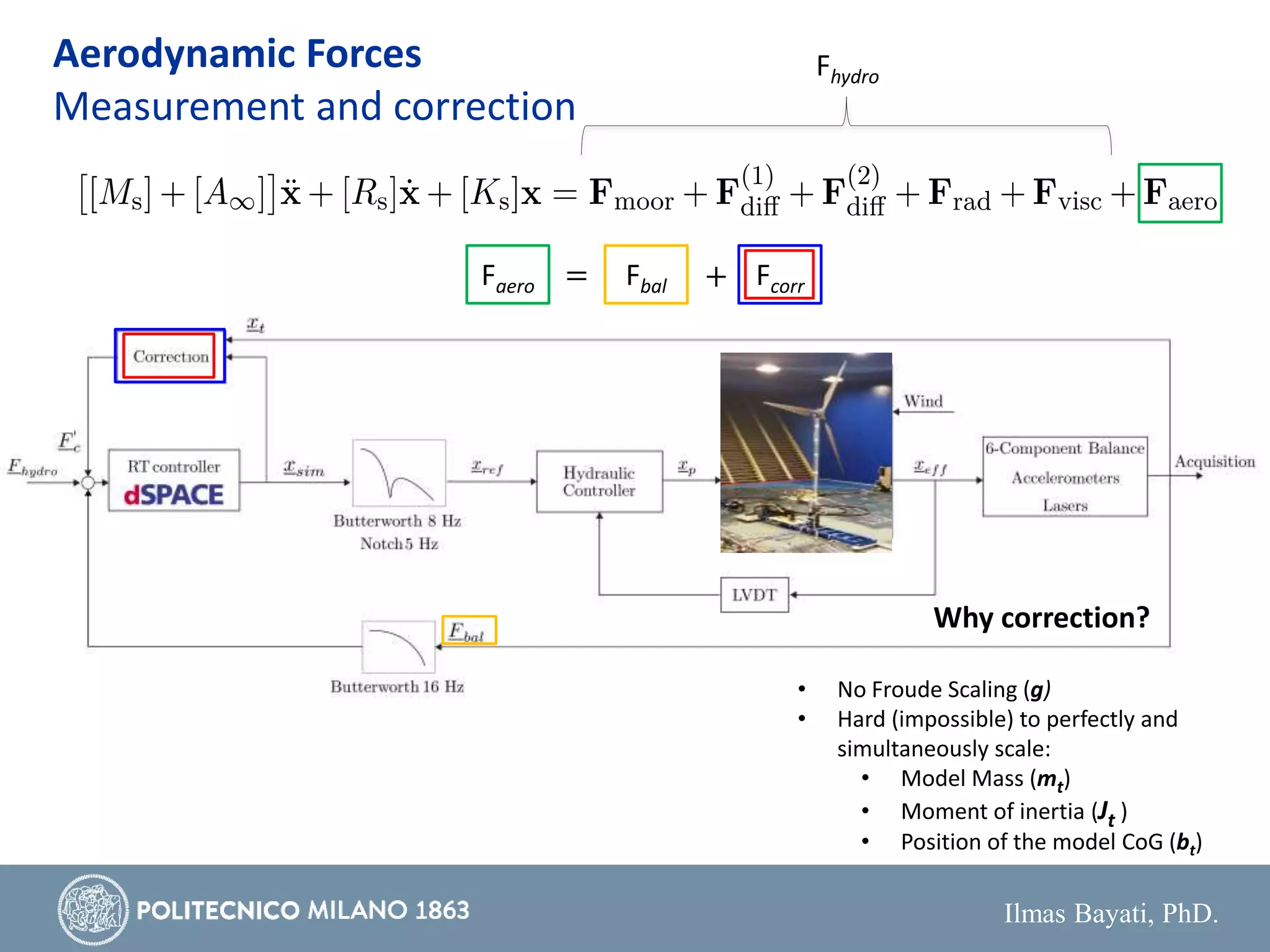
• Real time hydro-structure interaction
computation
Wind
Sea state
Wind Turbine Scale Model
• Real time measurements
[rotor, nacelle, tower base]
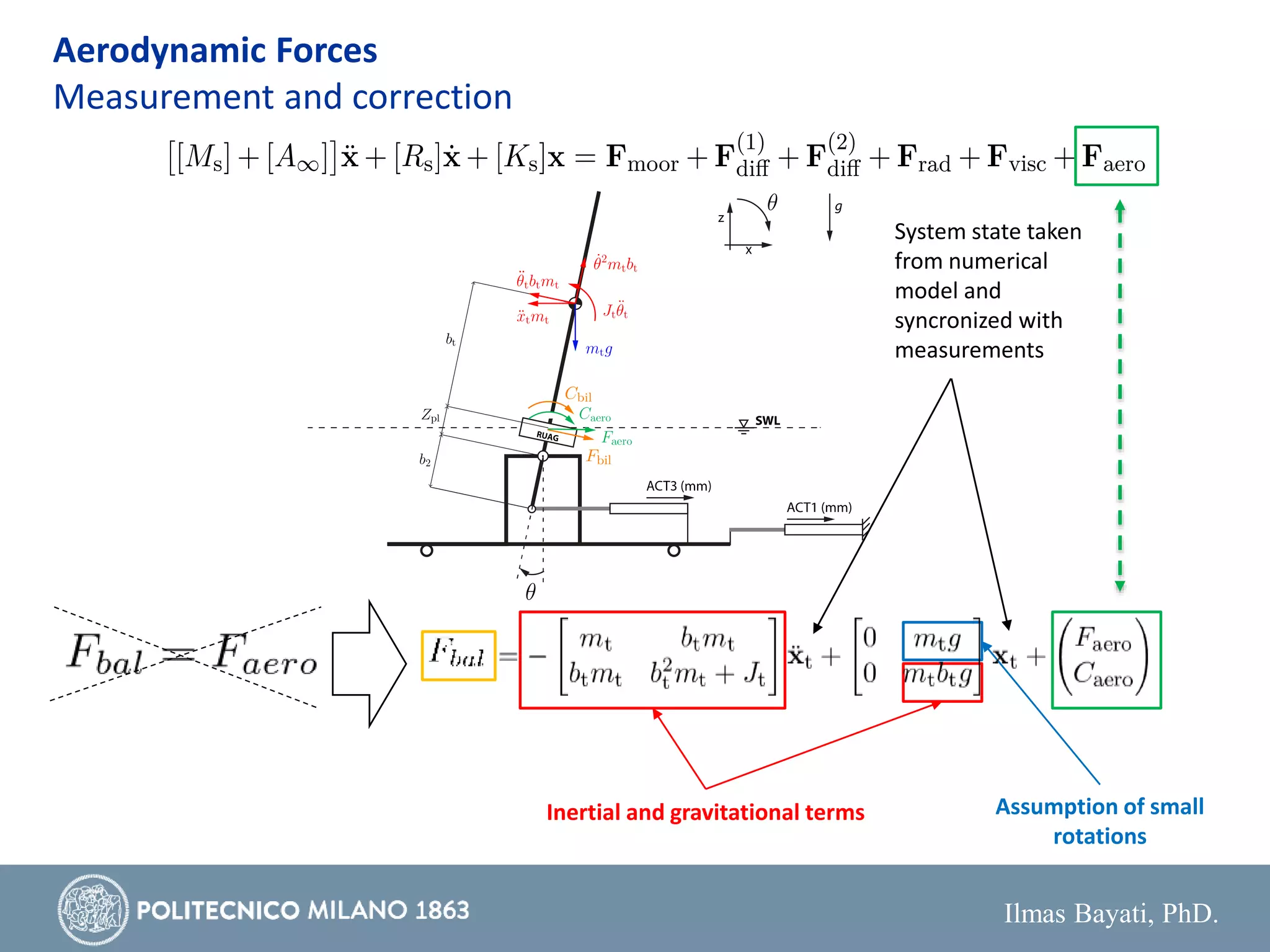
• Overall aerodynamic forces measured at the
base of the tower
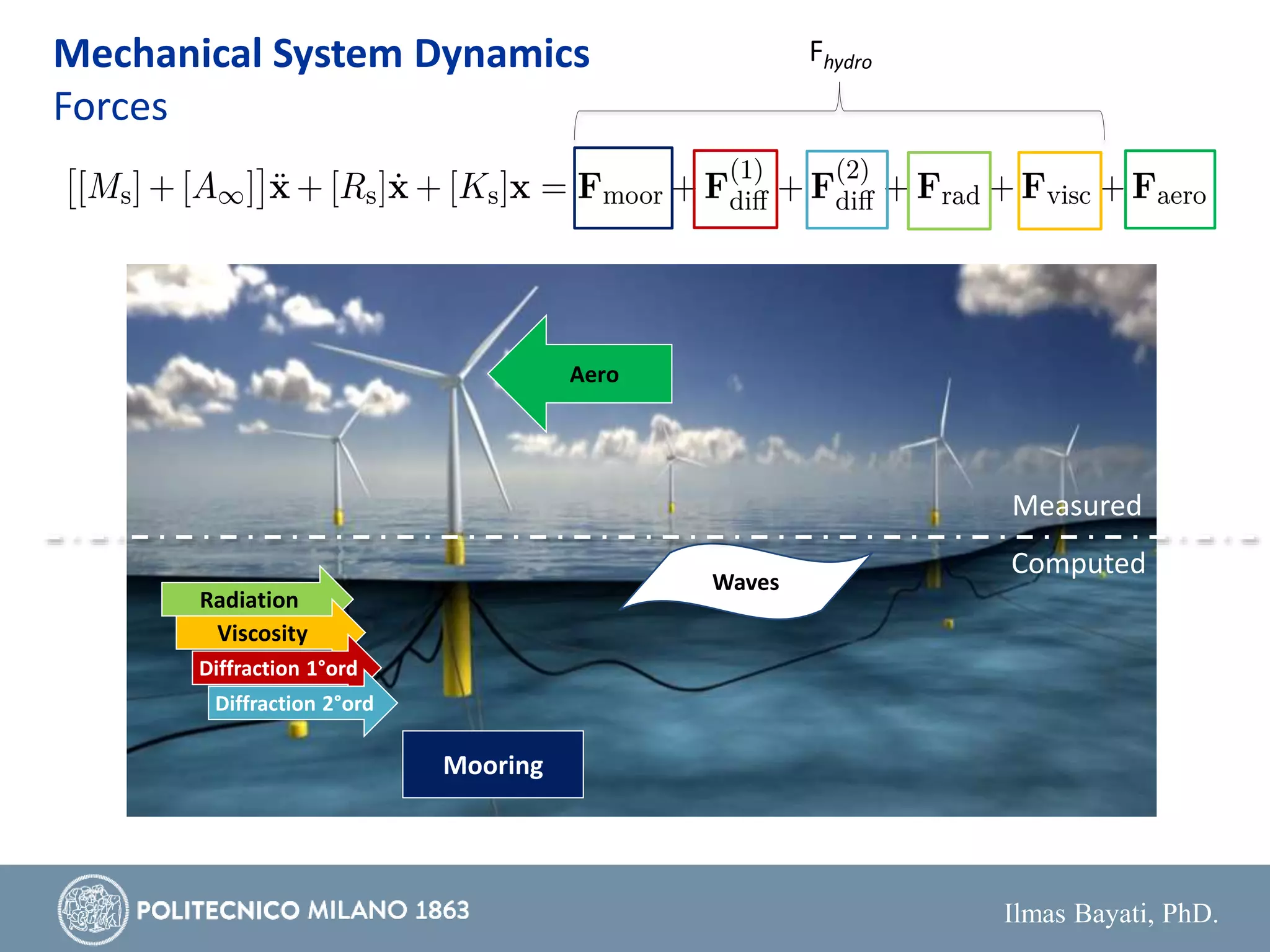
Hydro
Aero
Hydro
Load Balance](https://image.slidesharecdn.com/bayati-171119100501/75/Wind-Tunnel-2-DoF-Hybrid-Hil-tests-on-the-OC5-Floating-Offshore-Wind-Turbine-4-2048.jpg)
![Ilmas Bayati, PhD.
Floating Wind Turbines Testing:
Hardware(Software)-In-The-Loop approach
Floater Dynamics Simulation
• Real time hydro-structure interaction
reproduction
Wind
Sea state
Wind Turbine Scale Model
• Real time measurements
[rotor, nacelle, tower base]
• Overall aerodynamic forces measured at the
base of the tower
Hydro
Aero
Hydro
Load Balance](https://image.slidesharecdn.com/bayati-171119100501/75/Wind-Tunnel-2-DoF-Hybrid-Hil-tests-on-the-OC5-Floating-Offshore-Wind-Turbine-9-2048.jpg)