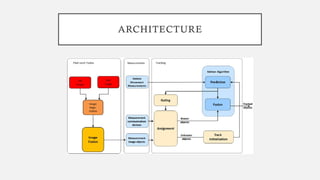
The document discusses the development of a real-time vehicle and pedestrian detection system that utilizes advanced computer vision techniques, specifically the yolov9 model, to enhance road safety through accurate detection and alerts. It also covers challenges in adverse weather conditions and proposes solutions involving deep learning methods and infrared imaging for improved detection accuracy in low-visibility scenarios. The paper concludes that ongoing research is necessary to further optimize detection systems for various environmental conditions and to integrate additional features for better performance.