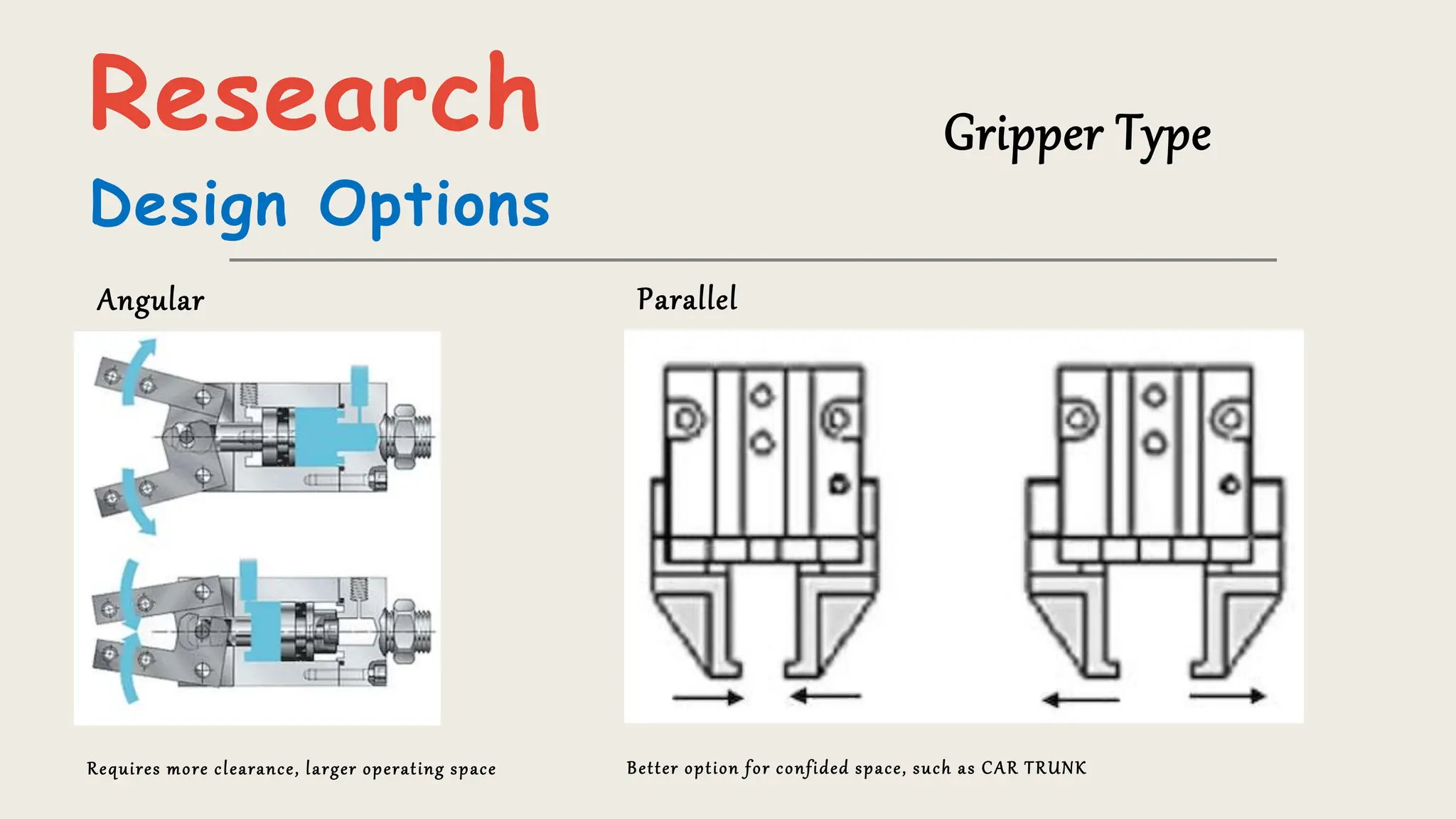
The document describes the design of a gripper for a robot to grasp a spare tire assembly from a rack and insert it into the trunk of a 2018 Honda Civic. A pneumatic gripper design was selected using a decision tree and Bayesian model. The gripper uses standard parts to reduce costs and maintenance. Forces acting on the gripper were analyzed using simulations. The optimized design is lightweight, low cost, durable and can accommodate various spare tire sizes.