Engelberger defines manyof the factors that should
be considered in assessing gripping requirements.
1. Consideration must be given to the potential problem of
scratching distorting the part during gripping, if the part is fragile
or has delicate surfaces.
2. If there is a choice between two different dimensions on a part,
the larger dimension should be selected for grasping. Holding the
part by its larger surface will provide better control and stability
of the part in positioning.
3. Gripper fingers can be designed to conform to the part shape by
using resilient pads or self-aligning fingers. The reason for using
sell-aligning fingers is to ensure that each finger makes contact
with the part in more than one place. This provides better part
control and physical stability. Use of replaceable fingers will allow
for wear and also for interchangeability for different part models.
14.
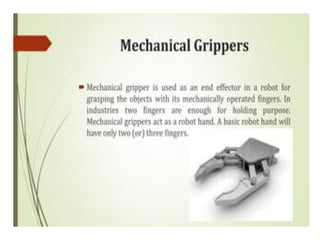
Engelberger defines manyof the factors that should
be considered in assessing gripping requirements.
4. The part surface to be grasped must be reachable. For
example, it must no enclosed within a chuck or other holding
fixture.
5. The Size variation of the part must be accounted for, and
how this might influence the accuracy of locating the part.
For example, there might be a problem in placing a rough
casting or forging into a chuck for machining operations.
6. The gripper design must accommodate the change in size
that occurs between part loading and unloading. For
example, the part size is reduced in machining and forging
operations.
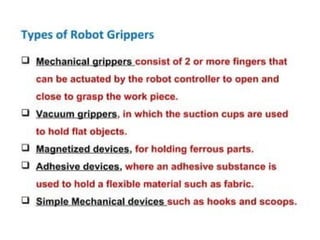
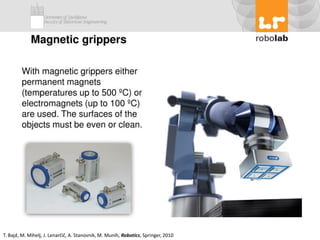
Magnetic grippers
Magnetic grippers
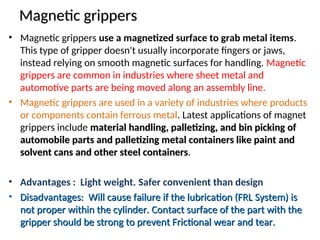
•Magnetic grippers use a magnetized surface to grab metal items.
This type of gripper doesn't usually incorporate fingers or jaws,
instead relying on smooth magnetic surfaces for handling. Magnetic
grippers are common in industries where sheet metal and
automotive parts are being moved along an assembly line.
• Magnetic grippers are used in a variety of industries where products
or components contain ferrous metal. Latest applications of magnet
grippers include material handling, palletizing, and bin picking of
material handling, palletizing, and bin picking of
automobile parts and palletizing metal containers like paint and
automobile parts and palletizing metal containers like paint and
solvent cans and other steel containers
solvent cans and other steel containers.
• Advantages : Light weight. Safer convenient than design
• Disadvantages: Will cause failure if the lubrication (FRL System) is
Disadvantages: Will cause failure if the lubrication (FRL System) is
not proper within the cylinder. Contact surface of the part with the
not proper within the cylinder. Contact surface of the part with the
gripper should be strong to prevent Frictional wear and tear.
gripper should be strong to prevent Frictional wear and tear.
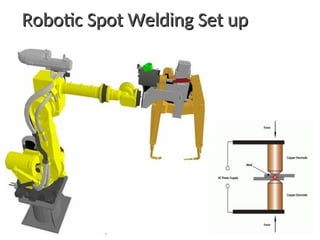
Robotic Spot Welding
RoboticSpot Welding
• Spot welding is a resistance welding process that uses large
electrical current to join two or more sheets of metal in a single
location. Spot welding technology has evolved through its
extensive use in automobile manufacturing using articulated
robots.
• Since spot welding involves joining metals together at specific
points, accuracy is crucial to the success of the weld. Spot
welding industrial robot arms are incredibly accurate. Many have
a point accuracy of 1 mm or less. This means welds will be
completed correctly at the intended point.
• The most common types of robotic welding is the arc process. In
this method, an electric arc generates extreme heat, up to 6,500
degrees Fahrenheit, which melts the metal. Molten metal joins
parts together, solidifying into a stable connection after cooling
43.
Benefits of RoboticWelding
Benefits of Robotic Welding
• More Consistent, Higher-Quality Welds. ...
• Greater Productivity, Yields, and Throughput.
• Reduced Waste and Less Rework in
General. ...
• Drastically Reduced Post-Weld Cleanup.
• Faster, More Efficient Road to the Market
44.
Advantages and Disadvantagesof Robotic
Advantages and Disadvantages of Robotic
welding
welding
• Advantages :
Advantages :Robotic welding is ideal for large
jobs. They are advantageous in that they
enhance efficiency, increased employee safety
increased employee safety,
reduced material waste
reduced material waste, and boosts accuracy
boosts accuracy.
• Disadvantages :
Disadvantages :Some of the robotics
disadvantages include high upfront costs,
minimal flexibility
minimal flexibility, and the lack of feasibility
the lack of feasibility
with small projects.
with small projects.
45.
Features Required forrobot in spot welding
Features Required for robot in spot welding
• Robot spot welding systems have several
considerations and features that come into play:
• Arm reach. ...
• Spot welding guns weigh well over 100 pounds, so
the arm must be able to safely support its weight
(along with the added weight of cables, hoses, etc.).
• Clamping pressure. ...
• Articulation and multi-axis motion. ...
• Power supply.
Robotic Spray Painting
RoboticSpray Painting
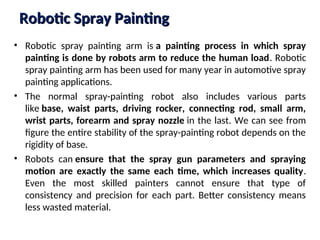
• Robotic spray painting arm is a painting process in which spray
painting is done by robots arm to reduce the human load. Robotic
spray painting arm has been used for many year in automotive spray
painting applications.
• The normal spray-painting robot also includes various parts
like base, waist parts, driving rocker, connecting rod, small arm,
wrist parts, forearm and spray nozzle in the last. We can see from
figure the entire stability of the spray-painting robot depends on the
rigidity of base.
• Robots can ensure that the spray gun parameters and spraying
motion are exactly the same each time, which increases quality.
Even the most skilled painters cannot ensure that type of
consistency and precision for each part. Better consistency means
less wasted material.
55.
The Cons ofRobotic Paint Arms
The Cons of Robotic Paint Arms
Cost – A robotic paint arm can have a high
initial price associated with it. In addition to the
cost of the product there can often be
additional costs associated with installation as
well as training to ensure that you can
effectively operate the paint robot.
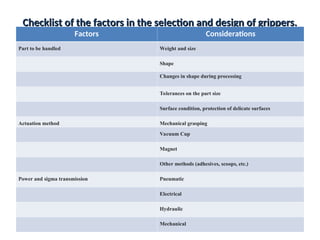
Checklist of thefactors in the selection and design of grippers.
Checklist of the factors in the selection and design of grippers.
Factors Considerations
Part to be handled Weight and size
Shape
Changes in shape during processing
Tolerances on the part size
Surface condition, protection of delicate surfaces
Actuation method Mechanical grasping
Vacuum Cup
Magnet
Other methods (adhesives, scoops, etc.)
Power and sigma transmission Pneumatic
Electrical
Hydraulic
Mechanical
59.
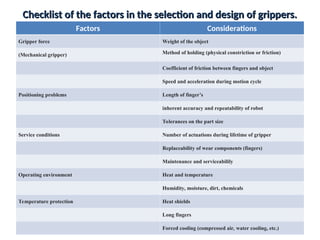
Checklist of thefactors in the selection and design of grippers.
Checklist of the factors in the selection and design of grippers.
Factors Considerations
Gripper force Weight of the object
(Mechanical gripper) Method of holding (physical constriction or friction)
Coefficient of friction between fingers and object
Speed and acceleration during motion cycle
Positioning problems Length of finger’s
inherent accuracy and repeatability of robot
Tolerances on the part size
Service conditions Number of actuations during lifetime of gripper
Replaceability of wear components (fingers)
Maintenance and serviceabilily
Operating environment Heat and temperature
Humidity, moisture, dirt, chemicals
Temperature protection Heat shields
Long fingers
Forced cooling (compressed air, water cooling, etc.)
60.
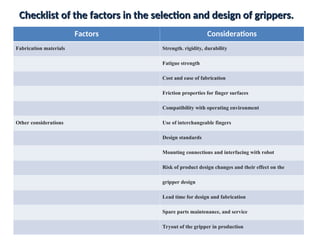
Checklist of thefactors in the selection and design of grippers.
Checklist of the factors in the selection and design of grippers.
Factors Considerations
Fabrication materials Strength. rigidity, durability
Fatigue strength
Cost and ease of fabrication
Friction properties for finger surfaces
Compatibility with operating environment
Other considerations Use of interchangeable fingers
Design standards
Mounting connections and interfacing with robot
Risk of product design changes and their effect on the
gripper design
Lead time for design and fabrication
Spare parts maintenance, and service
Tryout of the gripper in production