Tech Summit 2017の歩き方
データ & AI 編
Updated on October 20, 2017.
皆様、ごきげんよう。Tech Summit 2017 がいよいよ開催されます。この 2 日間、あちこちで魅力的
なセッションが実施されますが、さてどれを受講しよう?どれもこれも気になる…。そんなあなたに限ら
れた時間を最大限満喫いただくための耳より情報をお届けします。
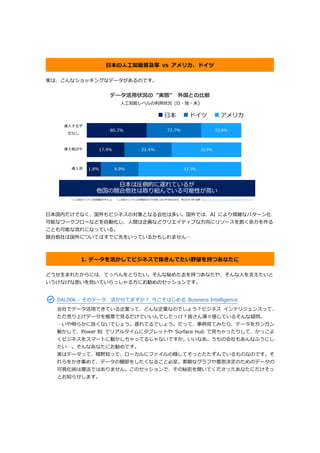
AI を利用することで私たち自身が自らの限界を超えていく
さて、なんといっても現在の技術で注目を浴びている分野は “人工知能 (AI)“ でしょう。
マイクロソフトは、「Our mission is to empower every person and every organization on the
planet to achieve more.」をカンパニー ミッションとしていますが、AI については人間にとって代わ
るものではなく、人々のできることをさらに伸ばすためのいわば「エージェント」ととらえています。
今回のデータ系トラックは、マイクロソフトの AI についての取り組み、そして AI が人の赤ん坊と考え
るならば、良質の学習教材が必要ですが、同様に優れた AI に「育てる」ためには、優れたデータと、優
れたデータ プラットフォームが必要です。
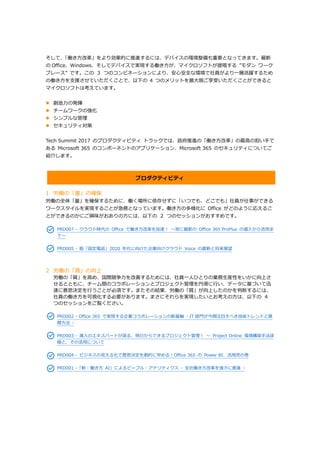
マイクロソフトのデータ戦略
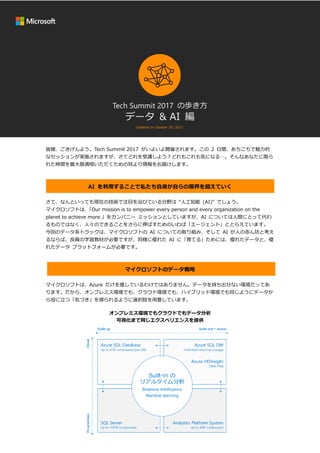
マイクロソフトは、Azure だけを推しているわけではありません。データを持ち出せない環境だってあ
ります。だから、オンプレミス環境でも、クラウド環境でも、ハイブリッド環境でも同じようにデータか
ら役に立つ「気づき」を得られるように選択肢を用意しています。
オンプレミス環境でもクラウドでもデータ分析
可視化まで同じエクスペリエンスを提供






![[Japan Tech summit 2017] SEC 006](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfsec006-171116035456-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] SEC 010](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfsec010-171127040527-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] PRD 007](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfprd007-171115033456-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] DAL 006](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfdal006-171115033148-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] PRD 002](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfprd002-171115033455-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] SPL 005](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfspl005-171116035846-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] DAL 003](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfdal003-171115033147-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] SEC 004](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfsec004-171116035501-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] CLD 016](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfcld016-171115032128-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] SEC 005](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfsec005-171116035502-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] CLD 021](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfcld021-171115032133-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] APP 001](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfapp001-171115031546-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] SEC 009](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfsec009-171116035457-thumbnail.jpg?width=640&height=640&fit=bounds)

![[Japan Tech summit 2017] DEP 009](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfdep009-171116035108-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] CLD 023](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfcld023-171115032147-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] CLD 007](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfcld007-171115032107-thumbnail.jpg?width=640&height=640&fit=bounds)


![[Japan Tech summit 2017] DEP 007](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfdep007-171116035105-thumbnail.jpg?width=640&height=640&fit=bounds)

![[Japan Tech summit 2017] CLD 006](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfcld006-171115032103-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] CLD 014](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfcld014-171115032121-thumbnail.jpg?width=640&height=640&fit=bounds)

![[Japan Tech summit 2017] PRD 009](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfprd009-171115033453-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] DAL 002](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfdal002-171115033147-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] DEP 001](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfdep001-171116035108-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] SEC 001](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfsec001-171116035455-thumbnail.jpg?width=640&height=640&fit=bounds)





![JPC2018[D1]「信頼できるCloud」のために ― マイクロソフト法務部門からお伝えしたいこと](https://cdn.slidesharecdn.com/ss_thumbnails/d1-180906030758-thumbnail.jpg?width=640&height=640&fit=bounds)
![JPC2018[A1]Microsoft Azure/AI で推進するビジネス改革](https://cdn.slidesharecdn.com/ss_thumbnails/a1-180904092107-thumbnail.jpg?width=640&height=640&fit=bounds)








![[BA07] Dynamics 365 を Application Platform とした PowerApps によるコンポジットアプリケーションの開発](https://cdn.slidesharecdn.com/ss_thumbnails/ba07-170605021439-thumbnail.jpg?width=640&height=640&fit=bounds)




![[Japan Tech summit 2017] APP 006](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfapp006-171127040530-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] SEC 011](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfsec011-171127040529-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] MAI 007](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfmai007-171127040526-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] DAL 005](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfdal005-171127040522-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] PRD 005](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfprd005-171116071452-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] SEC 012](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfsec012-171116071451-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] PRD 011](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfprd011-171116071451-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] MAI 005](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfmai005-171116071451-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] SPL 004](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfspl004-171116035845-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] SPL 002](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfspl002-171116035845-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] SEC 003](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfsec003-171116035500-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] PRD 001](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfprd001-171116035459-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] MAI 003](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfmai003-171116035458-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] SEC 007](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfsec007-171116035457-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] DEP 02](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfdep002-171116035109-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] DEP 008](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfdep008-171116035107-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] DEP 006](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfdep006-171116035106-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] DEP 005](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfdep005-171116035106-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] DEP 003](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfdep003-171116035105-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] MAI 002](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfmai002-171115034129-thumbnail.jpg?width=640&height=640&fit=bounds)