Αριστοτέλειο Πανεπιστήμιο Θεσσαλονίκης
ΤμήμαΗλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών
Αυτόνομη περιήγηση εκθεμάτων με τη βοήθεια ρομπότ
Εκπόνηση:
Επιβλέπων:
Ανοιξιάδου Αθηνά 7136
Συμεωνίδης Ανδρέας Επίκ. Καθηγητής
Πέτρου Λουκάς Αναπ. Καθηγητής
Τσαρδούλιας Εμμανουήλ Διδάκτωρ
Ιούλιος 2017
2.
Κίνητρο και σκοπόςτης διπλωματικής εργασίας
● Έναυσμα
Μεγάλη ανάπτυξη αυτόνομων ρομποτικών οχημάτων
● Σκοπός
Αυτόνομη πλοήγηση ρομπότ σε εσωτερικούς χώρους
● Υλοποίηση
Σχεδιασμός βέλτιστου μονοπατιού και αποφυγή δυναμικών εμποδίων με
σκοπό την επίσκεψη διαδοχικών στόχων
3.
Γνώσεις που αποκτήθηκαν
➔Χρήσηκαι εντολές Linux
➔ROS και χρήση εργαλείων ROS (rviz)
➔Εργαλείο ρομποτικής STDR_simulator
➔github
➔C++
Εργαλεία και τεχνικέςπου χρησιμοποιήθηκαν
➔Monte Carlo Localization (MCL)
◆ particles: πιθανές θέσεις του ρομπότ μέσα στον χώρο
➔Αλγόριθμος A*
◆ αλγόριθμος εύρεσης βέλτιστου μονοπατιού
◆ open set και closed set
6.
Δομή υλοποίησης
Πρώτο μέρος
➥Δημιουργία γράφου
➥ Εύρεση μονοπατιού μεταξύ δύο στόχων
➥ Βελτίωση μονοπατιού για αποφυγή
συγκρούσεων
➥ Επίσκεψη διαδοχικών στόχων
Δεύτερο μέρος
➥ Αναγνώριση δυναμικών εμποδίων
➥ Εντοπισμός της θέσης του ρομπότ σε
δυναμικό περιβάλλον
➥ Δυναμικός επανασχεδιασμός μονοπατιού
7.
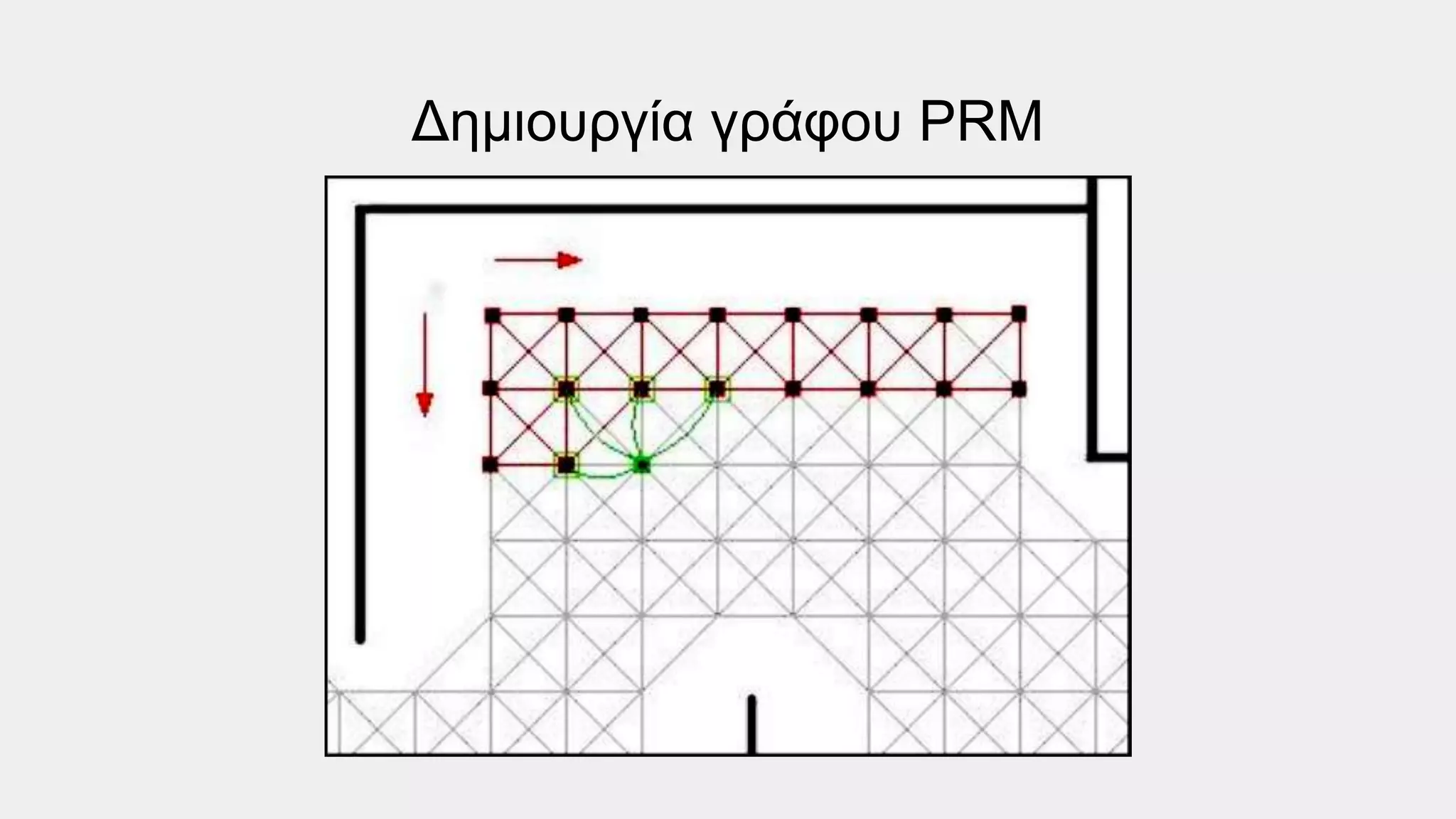
Δημιουργία γράφου PRM
●Γράφος ομοιόμορφης δειγματοληψίας
● Οι κόμβοι είναι διαμορφώσεις που ανήκουν στον ελεύθερο χώρο
● Για κάθε κόμβο ελέγχεται η σύνδεση και με τους 8 γειτονικούς κόμβους
● Οι ακμές αντιστοιχούν σε εφικτές διαδρομές
Εύρεση μονοπατιού
Εκτίμηση κόστουςδιαδρομής:
Βελτίωση εκτίμησης κόστους
διαδρομής:
f(n) = g(n) + h(n), όπου
n = 1, 2, 3, …
g(n): συνάρτηση για τον υπολογισμό του κόστους της διαδρομής
από τον αρχικό κόμβο μέχρι τον κόμβο n
h(n): heuristic συνάρτηση για τον υπολογισμό του κόστους της
διαδρομής από τον κόμβο n μέχρι τον τελικό στόχο
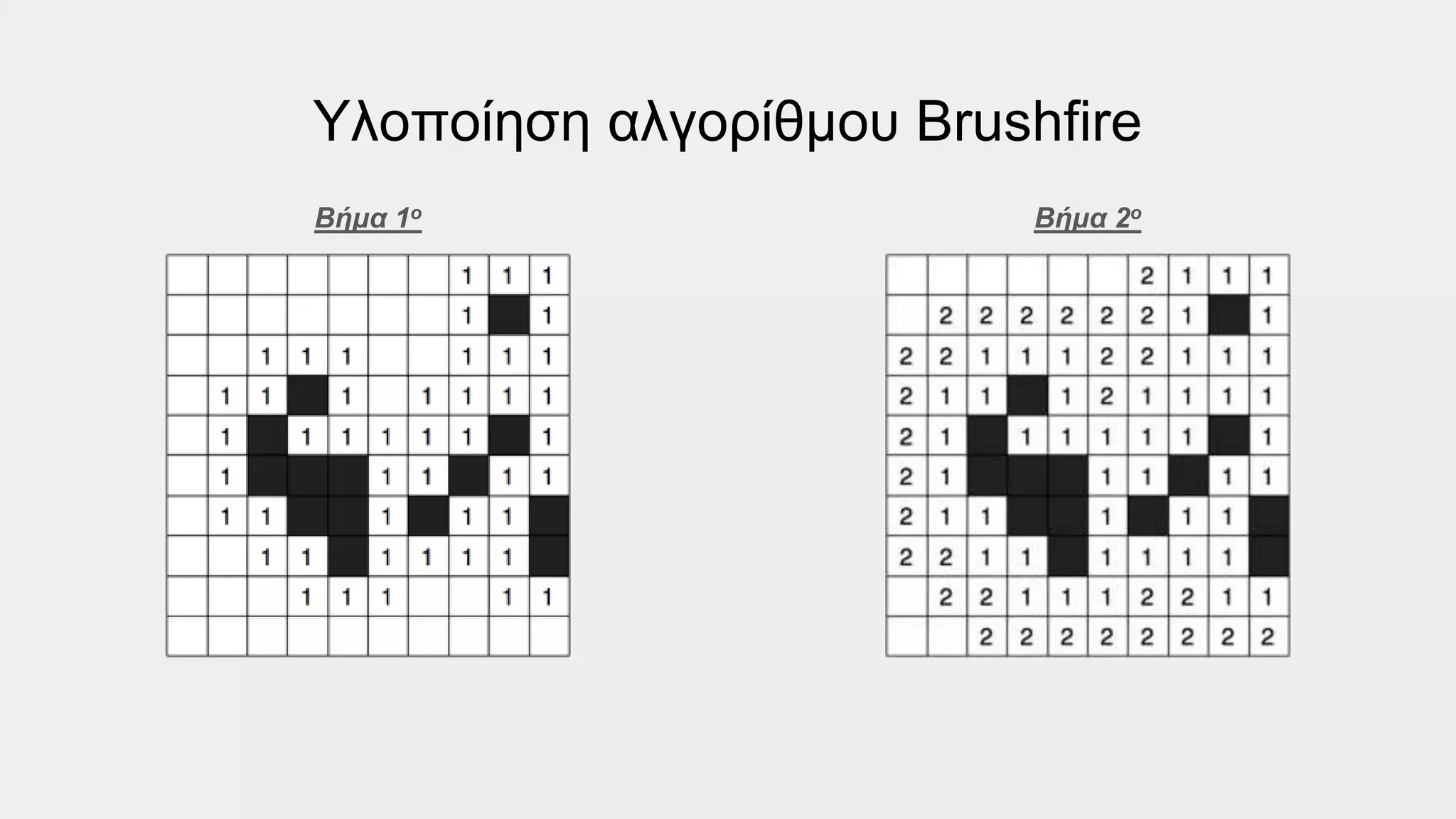
f(n) = g(n) + h(n) + brushfire_const / brushfire(n), όπου
brushfire_const: σταθερά
brushfire(n): απόσταση του κόμβου n από το κοντινότερο εμπόδιο
Επίσκεψη διαδοχικών στόχων
●Οι στόχοι επιλέγονται είτε από τους κόμβους του γράφου είτε από το σύνολο
του χώρου.
● Σχεδιασμός ενός μονοπατιού κάθε φορά.
● Κάθε μονοπάτι χωρίζεται σε υποστόχους.
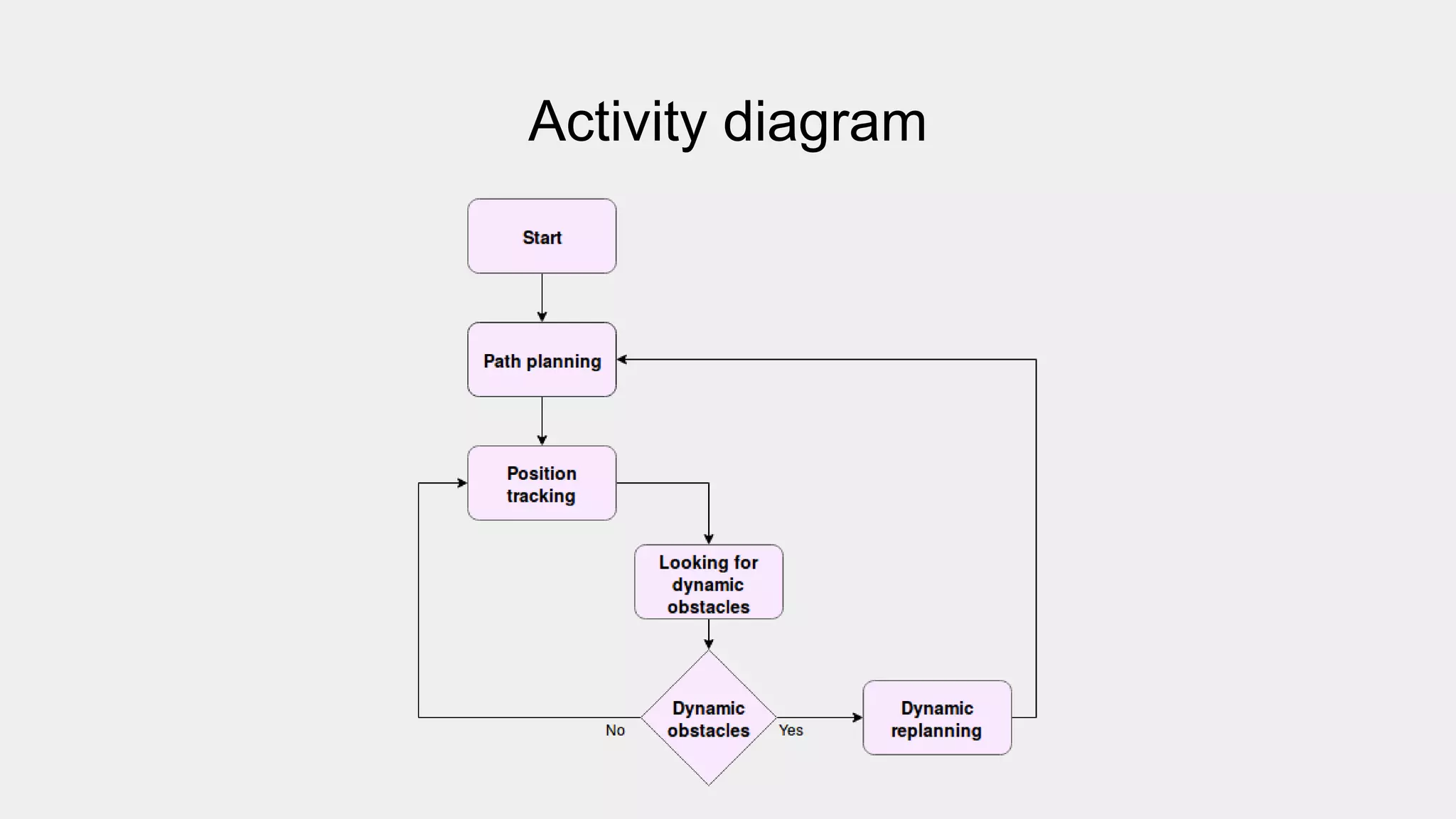
Dynamic replanning
1. Έλεγχοςγια την ύπαρξη δυναμικών εμποδίων κοντά στο μονοπάτι που έχει
υπολογιστεί.
2. Ανανέωση των τιμών του πίνακα Brushfire.
3. Επαναπροσδιορισμός του νέου μονοπατιού.
Συμπεράσματα
Πειράματα πρώτου μέρους
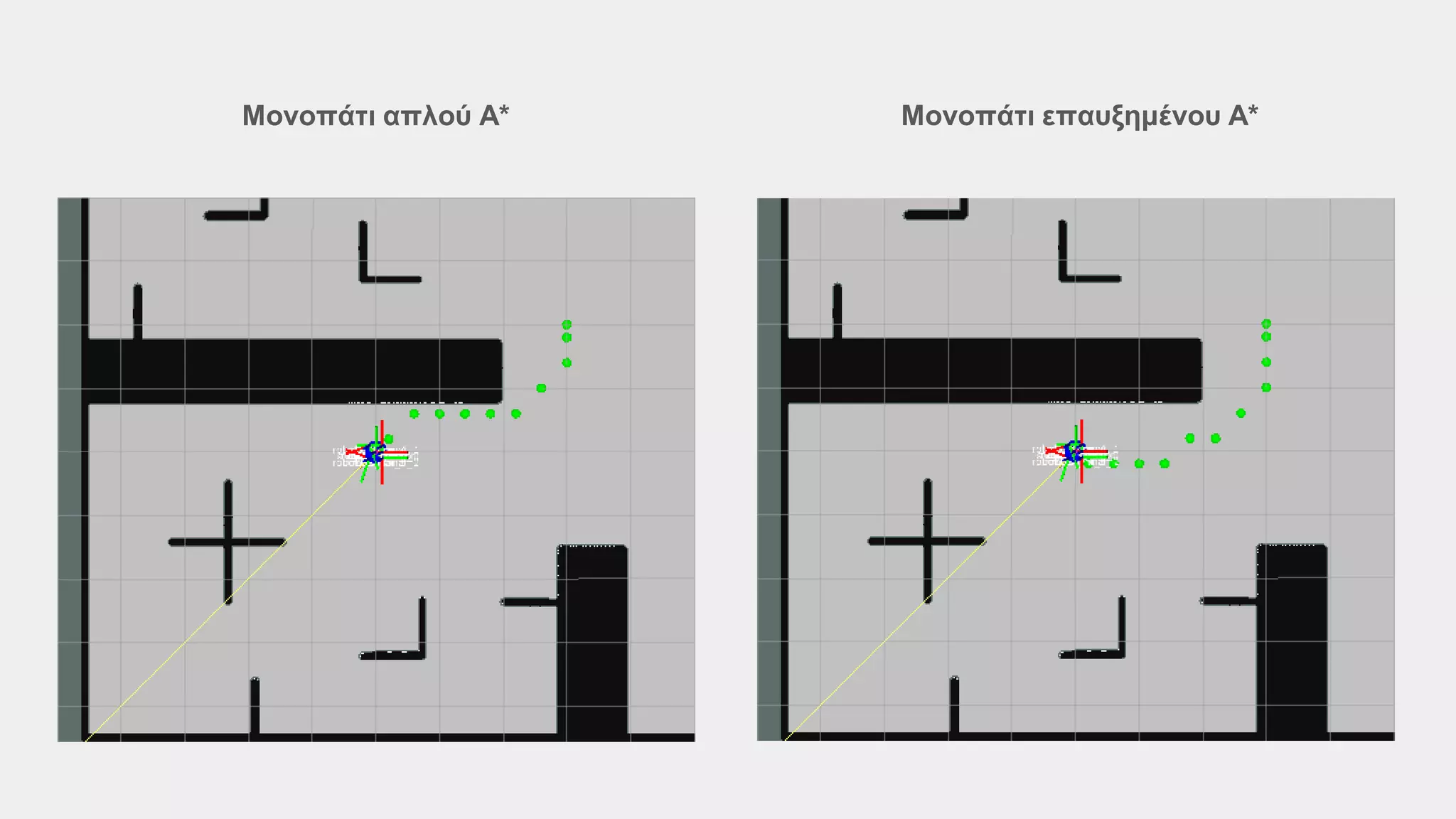
Οεπαυξημένος Α* αλγόριθμος είναι πιο αξιόπιστος από τον απλό A* στην
ολοκλήρωση μιας διαδρομής χωρίς συγκρούσεις.
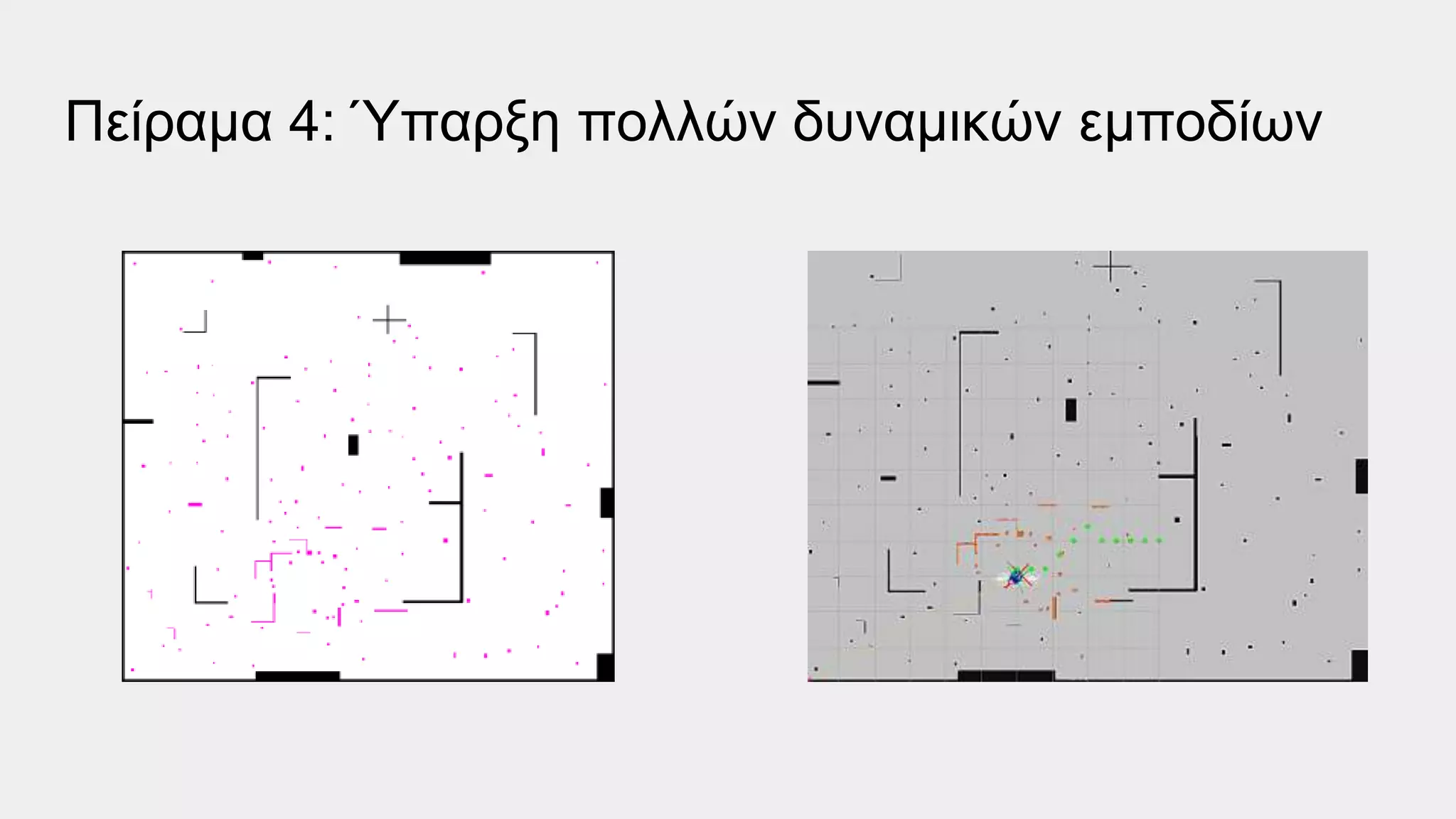
Πειράματα δεύτερου μέρους
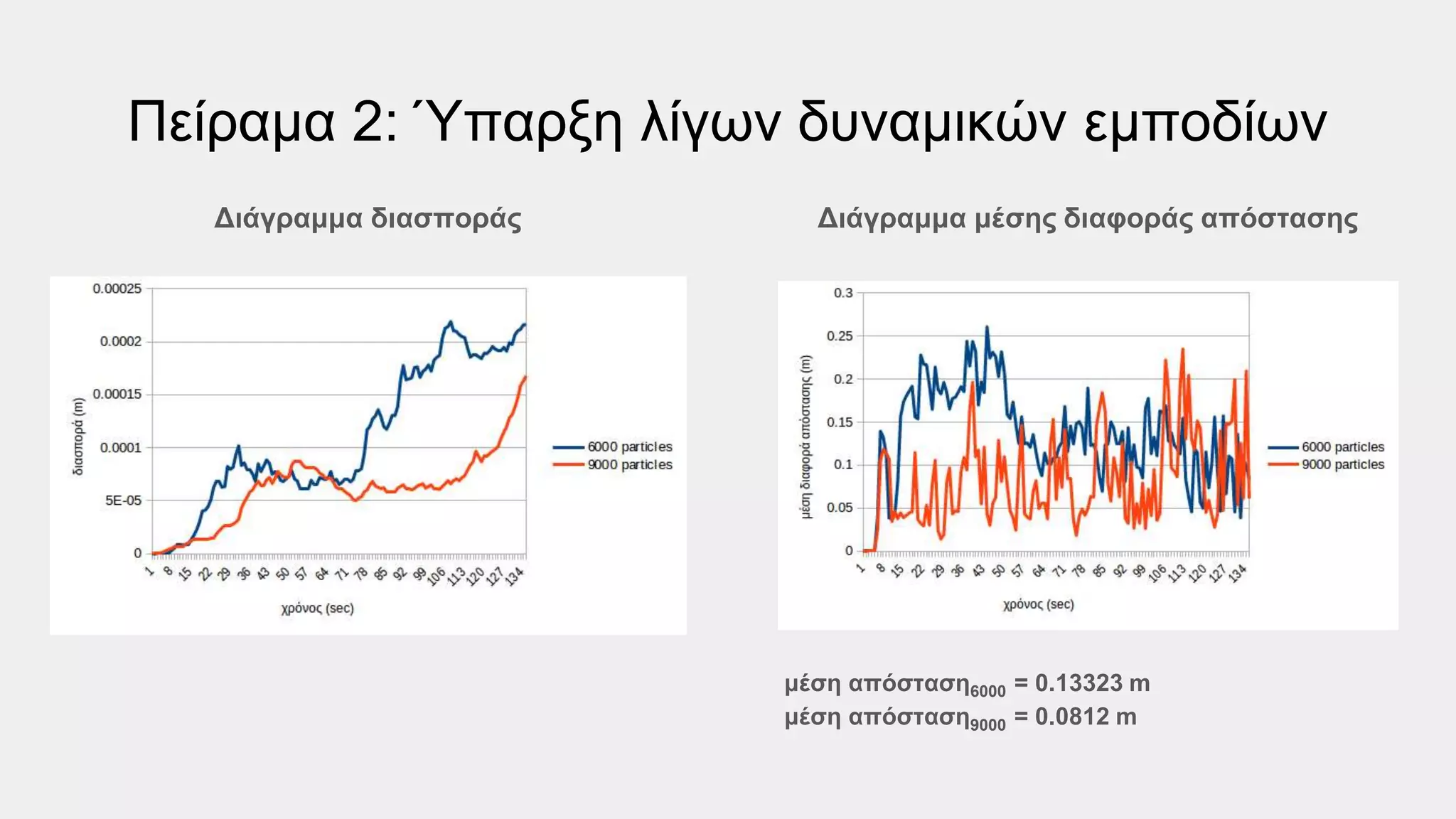
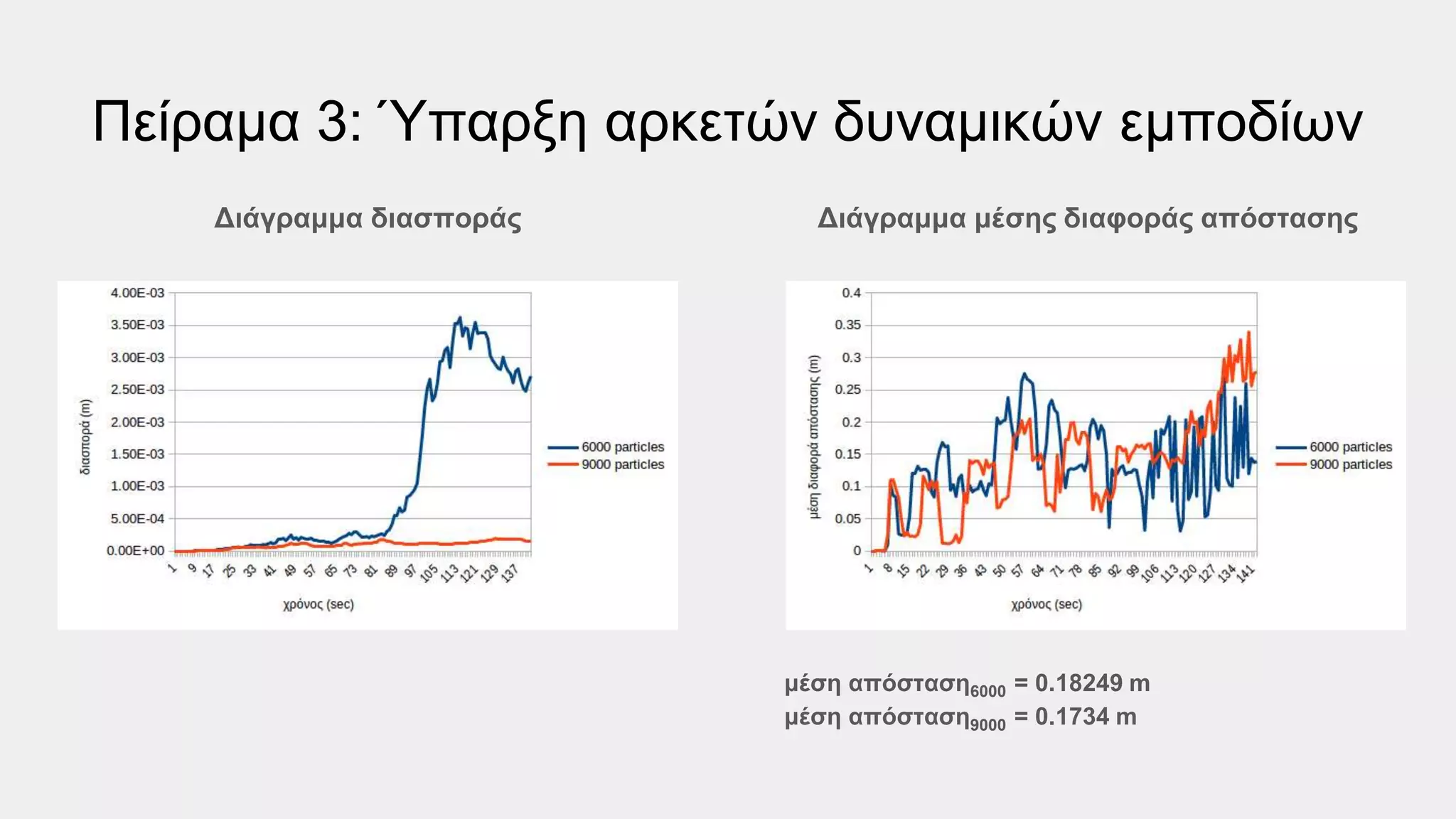
Με τη χρήση περισσότερων particles το ρομπότ μπορεί να εντοπιστεί με
μεγαλύτερη ακρίβεια.
Όσο μεγαλύτερο είναι το πλήθος των δυναμικών εμποδίων τόσο πιο δύσκολη
γίνεται η εύρεση της θέσης του ρομπότ.
Ευχαριστίες
Τον κ. Συμεωνίδηκαι τον κ. Πέτρου για την ανάθεση αυτής της εργασίας και την
ευκαιρία που μου έδωσαν να ασχοληθώ με τον τομέα της ρομποτικής.
Τον Μάνο Τσαρδούλια για την καθοδήγησή του και τις συμβουλές που μου έδινε.
Την οικογένειά μου και τους φίλους μου για την στήριξή τους όλα αυτά τα χρόνια.