Говорить www. roborace.te.ua Вікових, територіальних, національних та інших обмежень до учасників чемпіонату немає; У будь-якому зі змагань можуть взяти участь як студенти і школярі, так і фахівці в галузі робототехніки; Можуть брати участь як прості вузькоспрямовані конструкції, створені початківцями, так і комплексні робототехнічні пристрої зі складною програмною частиною; Потрібна команда 2 і більше людини; Робот повинен бути автономним; Змагання йдуть у кілька заїздів на виліт. Перемагає той, хто проїхав необхідну кількість кіл першим.
15.
Говорить www. roborace.te.ua Допускається більше одного робота від команди; Роботи можуть обганяти один одного без зіткнень; Зіткнення заборонені. За зіткнення нараховуються штрафи. Винен той, хто ззаду. ЗАГАЛОМ: Можна їхати як хочеш, а не тільки по чорній лінії; Можна їхати по обох лініях; Способи орієнтації - будь-які автономні; Робот 50 см x 25 см x 3 кг; Якщо роботів більше одного, то допустимі переговори між ними; Якщо робот несправний більше 10 секунд, команда може забрати його на доопрацювання.
16.
На новий сезон (попередньо): Результат командизараховується кращій машині; Машина повинна мати задні габаритні вогні - червоний світлодіод діаметром 5 мм і кутом розсіювання не менше 60 град. Спрямований в тил і розміщений не більше ніж на 1 см; Загальний результат розраховується за сумою балів по всіх заїздах; Робота над уніфікацією робоплатформи для змагань; Дівчата і вечірка.
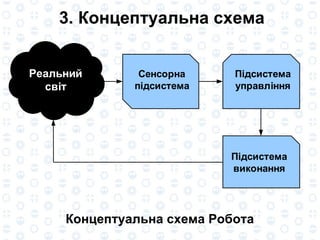
Сенсорна підсистема Мета- навчити робота відчувати світ! Точність, сприйняття, міра. Висока надійність сенсорів. Інтелектуальні алгоритми оброблення. Фільтрація даних сенсорів. Використання різних датчиків: Ультразвук; Датчик чорної лінії; Датчики перешкод; Інфрачервоний далекомір; .... Кожен датчик - не ідеальний і помиляється! Рішення - в комбінації датчиків і створення єдиної сенсорної системи.
28.
Підсистема управління Сукупністьапаратно-програмних засобів для управління роботом на трасі. Програмна частина - система реального часу, що приймає на основі даних сенсорів рішення як вести себе роботу на трасі. Апаратна частина - мікрокомп'ютер, енергоекономічний, компактний, але досить продуктивний, щоб виконувати програму управління в реальному часі. Програмна частина: дискретні алгоритми, інтелектуальні алгоритми. Слоган Roborace "Гонки інтелектів". Апаратна частина: мікроконтролер на базі Arduino, як сучасний бортовий комп'ютер.
29.
Підсистема виконання Трансформуєкоманди блоку управління в дії робочих частин робота на реальний світ. Гальмування, прискорення. Вибір швидкості руху по трасі. Контроль енергоспоживання. Підвіска. Регулювання кута повороту робота на трасі. Ударостійкість та безпека робота під час заїзду. Зчеплення коліс з трасою. Як не зносити стінки бортів? ....
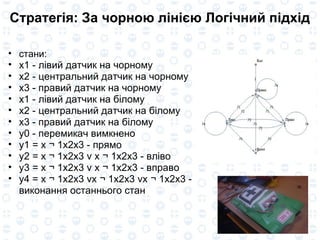
Стратегія: За чорною лінією Логічний підхід стани: x1- лівий датчик на чорному x2 - центральний датчик на чорному x3 - правий датчик на чорному x1 - лівий датчик на білому x2 - центральний датчик на білому x3 - правий датчик на білому y0 - перемикач вимкнено y1 = x ¬ 1x2x3 - прямо y2 = x ¬ 1x2x3 v x ¬ 1x2x3 - вліво y3 = x ¬ 1x2x3 v x ¬ 1x2x3 - вправо y4 = x ¬ 1x2x3 vx ¬ 1x2x3 vx ¬ 1x2x3 - виконання останнього стан
34.
Стратег і я:Г і бридн и й п і дх і д Дальном і р и для ор іє нтац ії по ст і нкам. Датчики зіткнень для початку програм и відновлення после зіткнень . Датчик ч о рно ї л і н ії для ор іє нтац і й . Перевага : багато динам і ч но перебираймих програм, маневр и в швидкості .
35.
Як підготуватис ь до участі ? Створити робота . Продумайте платформу. П родумайте механіку . П родумайте електроніку . Зробіть гарне живлення. Все працює? Починайте писати алгоритми. Підготувати робота. Перевірити. Ще раз все перевірити. А наліз траси . Пошук слабких місць на трасі . Адаптація робота на місці. Запас батарейками, колесами, платами і взагалі всім, що може скінчиться,відвалиться або зламатися. Умійте переписувати робота на ходу.
36.
Початок 2011 р в Тернопол і Наступні: Сезон RoboRace 2011/12 Підгот уйте робота заздалегід ь !!!
#2 Эта презентация расскажет вам о том, что такое соревнования Гоночных роботов RoboRace.
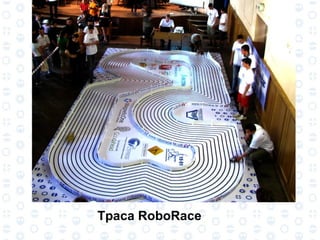
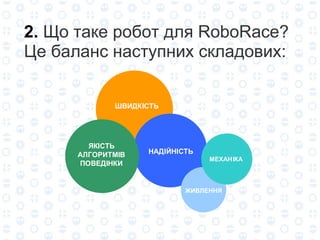
#3 RoboRace - это технические соревнования нового формата, робототехнический аналог формулы 1. Роботы соревнуются между собой в езде по трассе на скорость, эффективность и качество. Побеждает тот робот, который первый добрался до финиша. В соревнованиях могут принимать участие как простые узконаправленные конструкции, созданные начинающими, так и комплексные робототехнические устройства со сложной программной частью. Регламенты соревнований формируются таким образом, чтобы охватить как можно более широкий спектр характеристик и возможностей робототехнических конструкций. Участие в турнире могут принимать команды и индивидуальные участники. К соревнованиям допускаются автономные роботы, собранные на основе любойэлементной базы, что не противоречит регламенту.
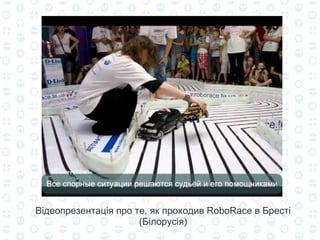
#18 Впервые в Беларуси пройдет этап соревнований RoboRace. Этап приурочен ко дню города Бреста.