Call Girls Alandi Road Call Me 7737669865 Budget Friendly No Advance Booking
Social services and human rights to know.ppt
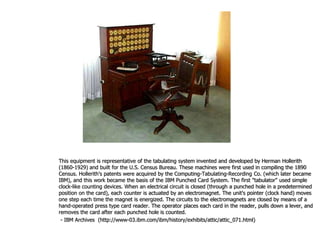
1. This equipment is representative of the tabulating system invented and developed by Herman Hollerith
(1860-1929) and built for the U.S. Census Bureau. These machines were first used in compiling the 1890
Census. Hollerith's patents were acquired by the Computing-Tabulating-Recording Co. (which later became
IBM), and this work became the basis of the IBM Punched Card System. The first "tabulator" used simple
clock-like counting devices. When an electrical circuit is closed (through a punched hole in a predetermined
position on the card), each counter is actuated by an electromagnet. The unit's pointer (clock hand) moves
one step each time the magnet is energized. The circuits to the electromagnets are closed by means of a
hand-operated press type card reader. The operator places each card in the reader, pulls down a lever, and
removes the card after each punched hole is counted.
- IBM Archives (http://www-03.ibm.com/ibm/history/exhibits/attic/attic_071.html)
3. Approaching an ISA
Instruction Set Architecture
Defines set of operations, instruction format, hardware
supported data types, named storage, addressing modes,
sequencing
Meaning of each instruction is described by RTL on
architected registers and memory
3
4. 4
Moving Toward Design
Given technology constraints assemble adequate datapath
Architected storage mapped to actual storage
Function units to do all the required operations
Possible additional storage (eg. MAR)
Interconnect to move information among regs and FUs
Map each instruction to sequence of RTLs
Collate sequences into symbolic controller state transition
diagram (STD)
Implement controller
5. Datapath vs Control
Datapath: Storage, FU, interconnect sufficient to perform the desired
functions
Inputs are Control Points
Outputs are signals (such as overflow, negative, etc)
Controller: State machine to orchestrate operation on the data path
Based on desired function and signals
5
Datapath Controller
Control Points
signals
6. 6
Contents
Design objectives
Information representation
Endian-ness, aligned access
Organization of Instructions
Encoding
7. 7
Instruction Set Design Objective #1
Code size (code density):
Depends on:
size of MM/cache
access time of cache (on-chip/off-chip)
CPU-MM bandwidth
Frequently used instructions should be short
Implies variable-length instructions
But there are negatives to this
8. Instruction Set Design Objective #2
Execution speed (performance) :
Only frequently executed instructions should be included in the instruction set
Infrequently executed instructions slow down the others
Complex and long instructions tend to be used infrequently
Defining hardware-software interface
Frequently executed instructions should be fast
Pipelining should be made as easy as possible
Overlapped execution lowers CPI value
Single instruction length, simple instruction formats, and few addressing
modes for easy decoding
Three (register) address instructions decouple CPU and memory
8
9. 9
Instruction Set Design Objective #3
Minimize size and complexity of hardware
(ALU/Control)
Implementing infrequently executed instructions ties down
hardware that is rarely used, and could be used for some
other purpose with greater advantage
10. Instruction Set Design Objective #4
Instruction set as a programming language
Needs of a human programmer (less important today)
Several desirable properties of instruction sets have been recognized and described,
such as orthogonality (each operand can be specified independently of the others)
and consistency (being able to predict the remainder of an architecture given partial
knowledge of the system)
Needs of an optimizing compiler
Simple instructions are more suitable for code optimizations
Optimizing compilers try to find the shortest or fastest code sequence that
implements the semantics of a HLL program. To make code reorganization
tractable, an instruction set is needed that makes:
– the size of each instruction easy to calculate;
– the execution time of each instruction easy to calculate;
– the interactions between instructions easy to figure out.
ISA features such as complex addressing modes, variable length instructions,
special-purpose registers provide too many ways of doing the same thing and lead
to combinatorial explosion
10
11. Notations for Information Representation
11
64 bits
8 bytes
2 words
1 doubleword
Q: How do we number these various units of information in a consistent manner?
9 6 2 1 7 6 6
Most Significant Digit (MSD)
“Big End”
Least Significant Digit (LSD)
“Little End”
0 1 2 3 4 5 6
“Big End”-ian Numbering
6 5 4 3 2 1 0 “Little End”-ian Numbering
“On holy wars and a plea for peace”, Danny Cohen, IEEE Computer 14(10), pages 49-54, Oct 1981
12. Why Is Numbering Important?
English text is written left-to-right and the characters are numbered left-
to-right
Numbers can be numbered in two different ways
Memory locations are numbered (addresses)
Consequences of numbering
Data is stored in memory according to byte numbering (the lower-numbered byte goes
into a byte in memory with a smaller address)
Data is sent through a bit-serial communication channel according to bit numbering (bit 0
goes first, followed by bit 1, etc.)
When displaying computer representation for humans
Numbers are written in the usual way (MSD on left, LSD on right)
Text is written in such a way as to match the numbering of numbers
12
13. Odds and Ends about Numbering
The Little Endian notation is compatible with mathematical
conventions of positional notation
The Little Endian notation has the disadvantage that is
displays English text in reverse
To overcome this, manuals for Little Endian machines usually display character
strings vertically
Example machines
Little Endian: PDP-11, VAX, 80x86
Big Endian: IBM 370, MIPS, DLX, SPARC
Mixed: Motorola 68000, Z8000
Big Endian byte ordering
Little Endian bit ordering
13
14. Alignment of Words in Memory
CPU accesses a 32-bit word of data starting at byte address x…x00
Such an address (multiple of 32[b]/8[b/B] = 4[B]) is called word-aligned
Memory controller is simple and fast, data available in one cycle
CPU accesses a 32-bit word of data starting at byte address 01111
Byte addresses are 01111, 10000, 10001, 10010 (misaligned address)
Doubles the access time of word
Requiring aligned addresses results in simpler memory controller and faster
execution
Costs some loss of storage, and adds complexity in code generators
14
32 bits
Mem
Bank
00
8
Mem
Bank
01
8
Mem
Bank
10
8
Mem
Bank
11
8
Memory
Controller
15. Sub-Word Accesses
Byte operand in register is usually the rightmost byte of register
Byte may come from any of the four memory banks
Needs routing/permuting hardware
Either at memory side of bus (justified bus)
Byte always travels on rightmost quarter of bus
Or on CPU side (unjustified bus)
Bus lanes are extensions of memory bank lanes
Source of complications in either case 15
32 bits
Mem
Bank
00
8
Mem
Bank
01
8
Mem
Bank
10
8
Mem
Bank
11
8
Memory
Controller
CPU
Register
File
(32 bits)
19. Classification by Operands
Stack Accumulator General Purpose Register
Load/Store Reg/Mem Mem/Mem
ALU operations 0 address 1 address 3 address 2 (or 1.5) address 3 address
Explicit operands (1,1) (0,3) (1,2), (1, 3), (2, 2) (3, 3)
Instruction size Short Short 4 bytes 2/4/6 bytes variable
Needs separate Load/Store Load/Store Load/Store Store
Early examples Burroughs PDP-8 CDC 6600 IBM S/360 DEC VAX-11/780
B5000- Intel 8086 IBM S/370
B7500 Motorola 6809
Current examples Transputer All RISC machines IBM 3033, IBM S/390
Amdahl V
Hitachi, Fujitsu
Orthogonality Farthest from Intermediate Closest to
Pipelining Easiest Intermediate Hardest
19
Important machines that are difficult to classify
Intel 80x86
variable instruction size: 1-17 bytes
memory can be destination
uses implied registers
Motorola 680x0
Instruction size: 2, 4, 6, 8, 10 bytes
Two address format only (2, 2)
(m,n) means
m memory operands
n total operands
20. Registers versus Cache
Similarities
Both small, fast, and expensive (flip-flops)
Both used to increase execution speed of CPU
Both operate based on locality of reference
Differences
Registers are visible in ISA; caches are not (except for instructions for invalidation,
prefetch, or flushing)
Number of registers is fixed by instruction format; size of cache is easily changeable
Registers have higher BW: 3 words/cycle, and are random-access; caches have lower
BW: 1 word/cycle, and are associative
Register access time is fixed; cache access time is statistical
Register allocation is explicit by compiler; cache allocation is automatic
Registers require fewer bits to address; caches require full memory addresses
Registers create no I/O problems; caches do
20
21. Organization of Registers
One general-purpose set (all interchangeable, “typeless”)
One general-purpose set (a few with dedicated uses)
PDP-11: eight 16-bit registers (R6: stack pointer, R7: PC)
VAX 11/780: sixteen 32-bit registers (four special-purpose, R14: stack pointer, R15: PC)
Two sets
Motorola 68000: eight 32-bit data, eight 32-bit address
IBM 370: sixteen 32-bit integer, four 64-bit FP
DLX, MIPS: 31 32-bit integer, 32 32-bit FP
Three sets
CDC 6600: eight 18-bit integer, eight 18-bit address, eight 60-bit FP
Many registers with dedicated use
Intel 80x86
21
22. Addressing Modes
We can’t directly refer to data values, only their addresses
Except for immediate operands
Register deferred and direct addressing modes can be synthesized from
displacement addressing mode
22
Name Example Meaning When used
Register add r4, r3 R[r4] := R[r4]+R[r3] When value is in register
Immediate add r4, #3 R[r4] := R[r4]+3 For constants
Displacement add r4, 100(r1) R[r4] := R[r4]+M[100+R[r1]] Accessing local variables
Register deferred add r4, (r1) R[r4] := R[r4] + M[R[r1]] Pointer, computed address
Indexed add r3, (r1+r2) R[r3] := R[r3]+M[R[r1]+R[r2]] Array addressing
Direct add r1, (1001) R[r1] := R[r1]+M[1001] Static data
Memory indirect add r1, @(r3) R[r1] := R[r1]+M[M[R[r3]]] Pointer dereferencing
Autoincrement add r1, (r2)+ R[r1] := R[r1]+M[R[r2]]; R[r2] := R[r2]+d Stepping through array
Autodecrement add r1, -(r2) R[r2] := R[r2]-d; R[r1] := R[r1]+M[R[r2]] Stepping through array
Scaled add r1, 100(r2)[r3] R[r1] := R[r1]+M[100+R[r2]+d*R[r3]] Array indexing
R : the register file
M: the memory address space
d : the size of the data item being accessed (1, 2, 4, 8 bytes)
24. 24
Address Displacement Sizes
This type of data would help you decide how much space to
allocate to displacement. Tested on a machine w/ 16 bits of
displacement, so can’t evaluate more.
SPEC2000
26. 26
Length of Immediate Oper.
Max size was 16. HP book says that a study on
VAX (32-bit imm.) showed 20-25% were longer
than 16 bits
27. 27
Control Transfer Instructions
Terminology
BTA (Branch Target Address): The destination address of the branch
The BTA is static if it is always the same during execution
The BTA is dynamic if it can vary during a single execution of a program (procedure
return, O-O dynamic dispatch, switch statements are major examples)
Branch taken if next instruction to be executed is at address BTA
Branch not taken if next instruction to be executed is the one following the branch
instruction (“fall-through”)
Branch outcome: whether the branch is taken or not taken
Forward branch: BTA > (PC), where (PC) is the address of the branch instruction
Backward branch: BTA < (PC)
An unconditional branch is always taken
28. Code Generation Examples for Branches
28
if (x > 0) y += z;
else y -=z;
blez r7, L18
addu r3, r3, r4
j L33
L18:
subu r3, r3, r4
L33:
while (a < b) {
a++; b--; x++;
}
j L33
L34:
addu r5, r5, 1
addu r6, r6, -1
addu r7, r7, 1
L33:
slt r2, r5, r6
bne r2, r0, L34
Register r3 contains y
Register r4 contains z
Register r5 contains a
Register r6 contains b
Register r7 contains x
29. 29
Classification of Branches
HP terminology Branch Jump Call Return
Conditional Unconditional Unconditional Unconditional
HLL equivalent IF-THEN GOTO CALL RETURN
Relative freq. 83% 5% 6% 6%
Taken With probability T always always always
Not taken With probability 1-T never never never
BTA static most often (PC-relative) PC-relative most frequent never
BTA dynamic usually not allowed BTA in register BTA in register always
Taken Not Taken
F&T F&NT Forward
B&T B&NT Backward
Classifying branches into these four
groups permits us to compute some of the
dynamic frequencies if some others have
been measured.
Rule of thumb: Backward branches tend to be taken,
forward branches tend not to be taken. Why?
30. Evaluating Branch Conditions
30
Name How is condition tested? Advantages Disadvantages
Condition code Special bits set by ALU ops Sometimes condition is Extra state, additional constraints
set for free on instruction reordering
Condition register Test arbitrary register Simple Uses up a register
with result of comparison
Compare and branch Compare is part of branch One instruction rather May be too much work
than two per instruction
Typical set of condition codes (e.g., Motorola 680x0)
NegativeResult, ZeroResult, ArithmeticOverflow, CarryOut
Many RISC machines do not use condition codes (e.g.,
MIPS, Alpha)
Magnitude comparisons are done with explicit COMPARE instructions
that put their results into named registers
Some instructions have two variants: one traps on overflow, the
other does not