Downloaded 19 times

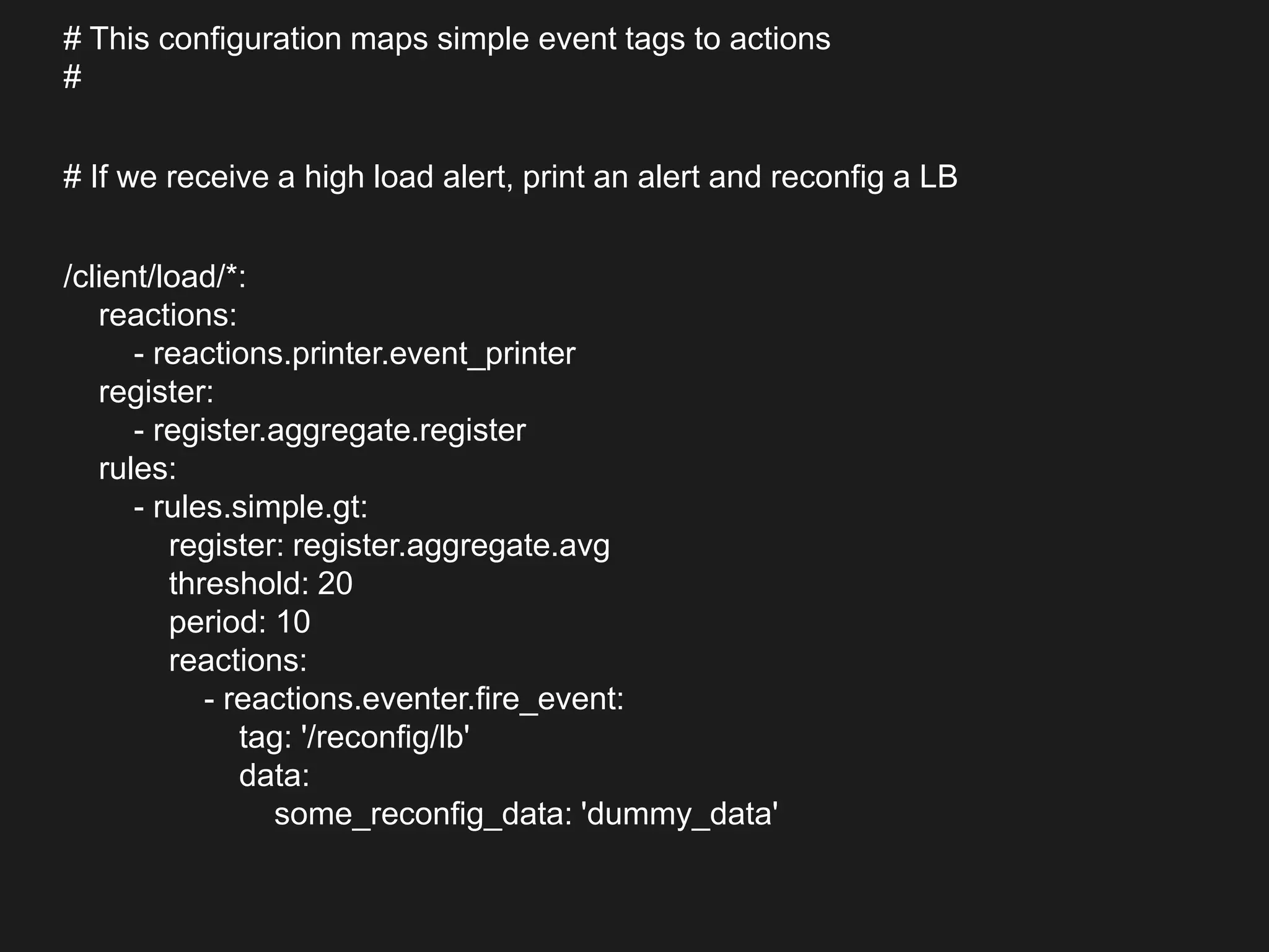

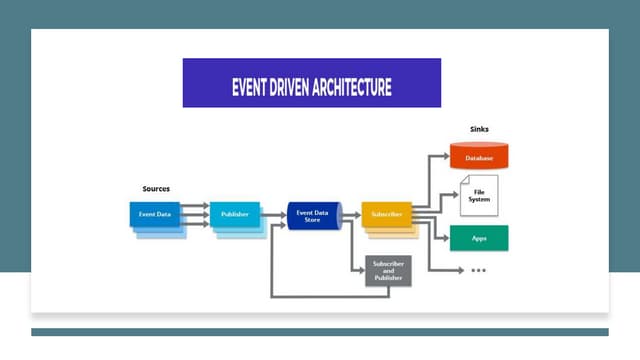
The document discusses the concept of event-driven infrastructure, highlighting the importance of message buses for automation and event-driven programming. It outlines the principles, advantages, and challenges of such systems, emphasizing their role in building scalable, reactive systems based on events from applications and environments. The presentation encourages the development of shared abstractions for managing events and automation effectively.