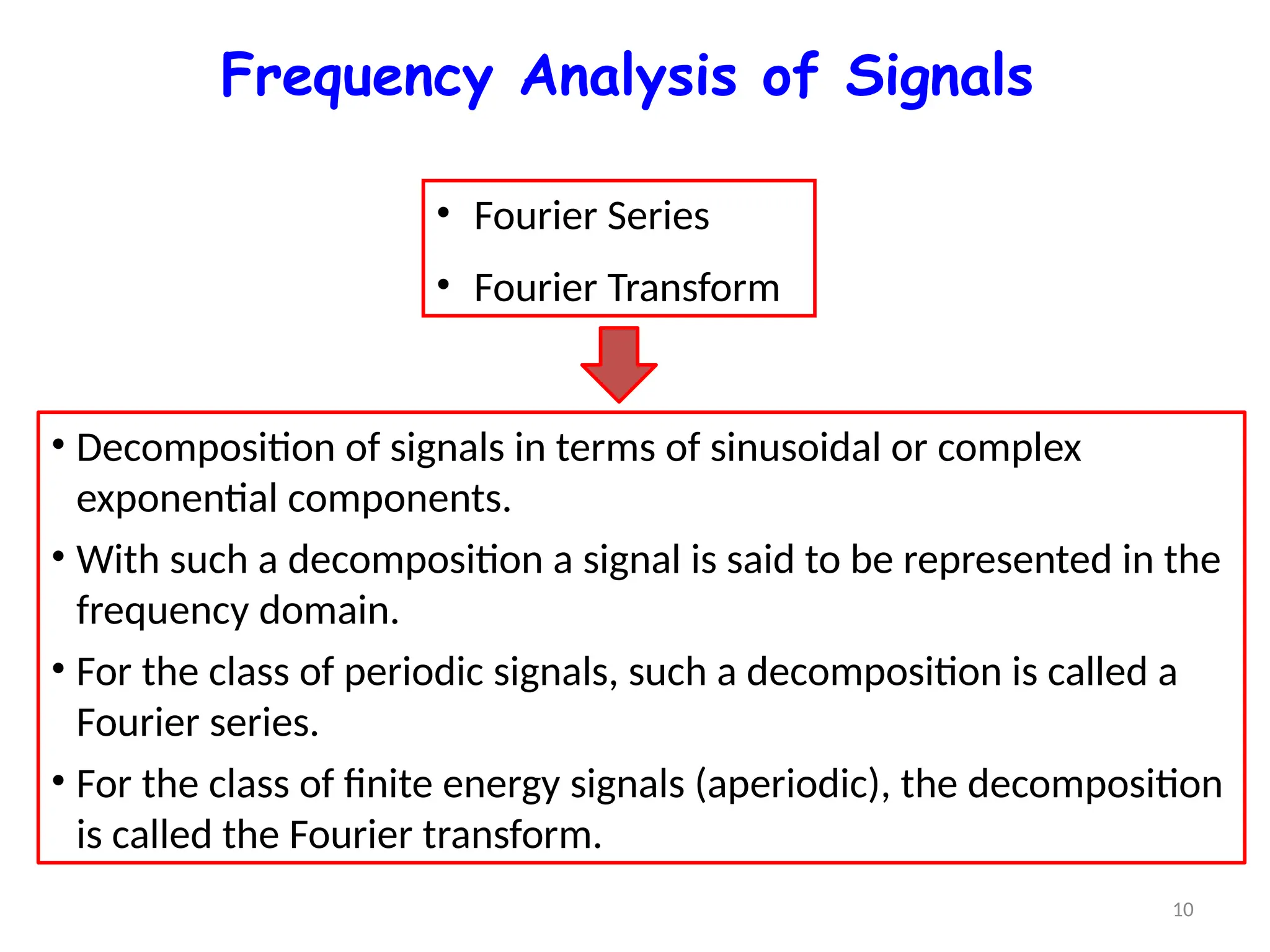
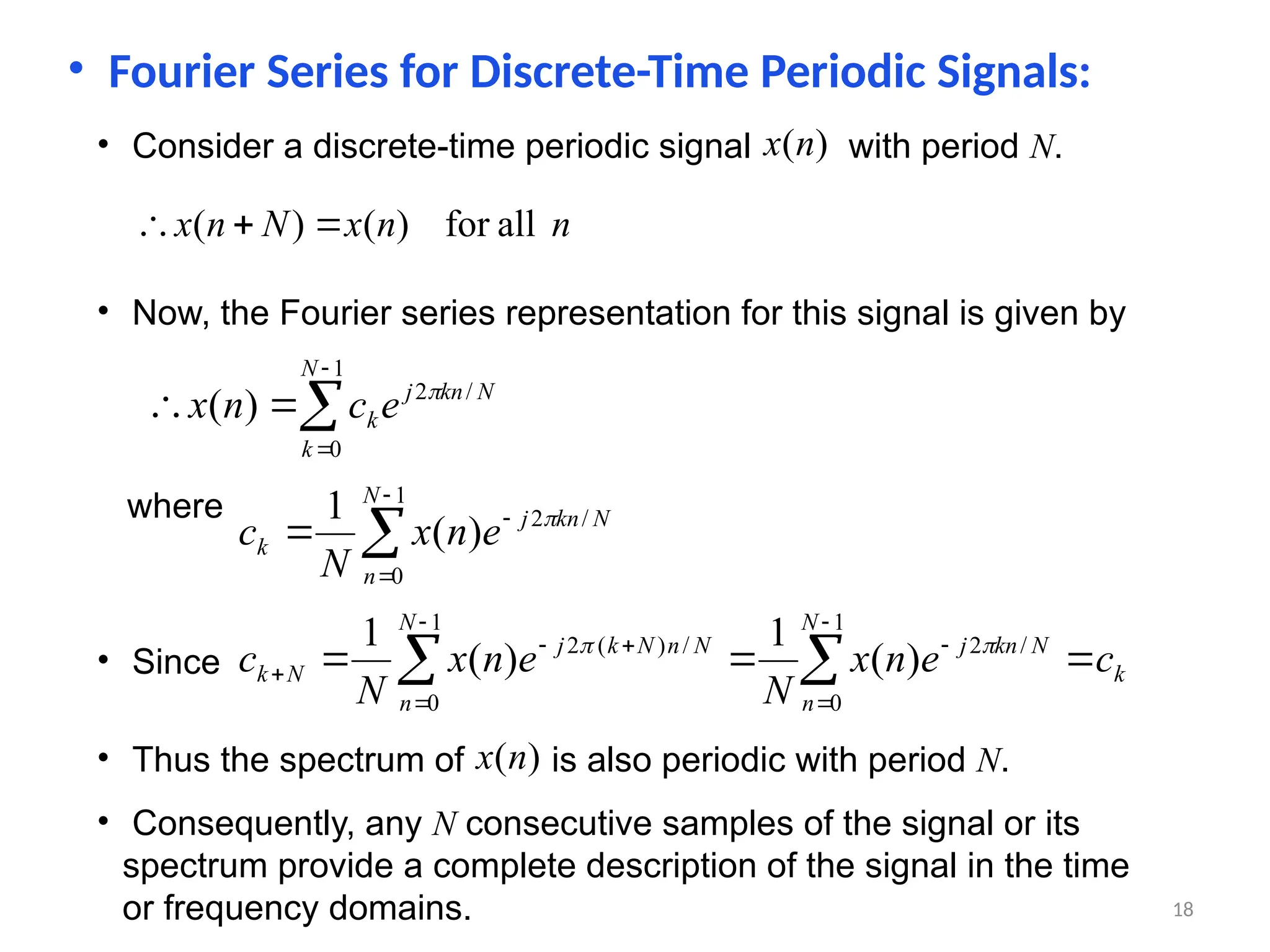
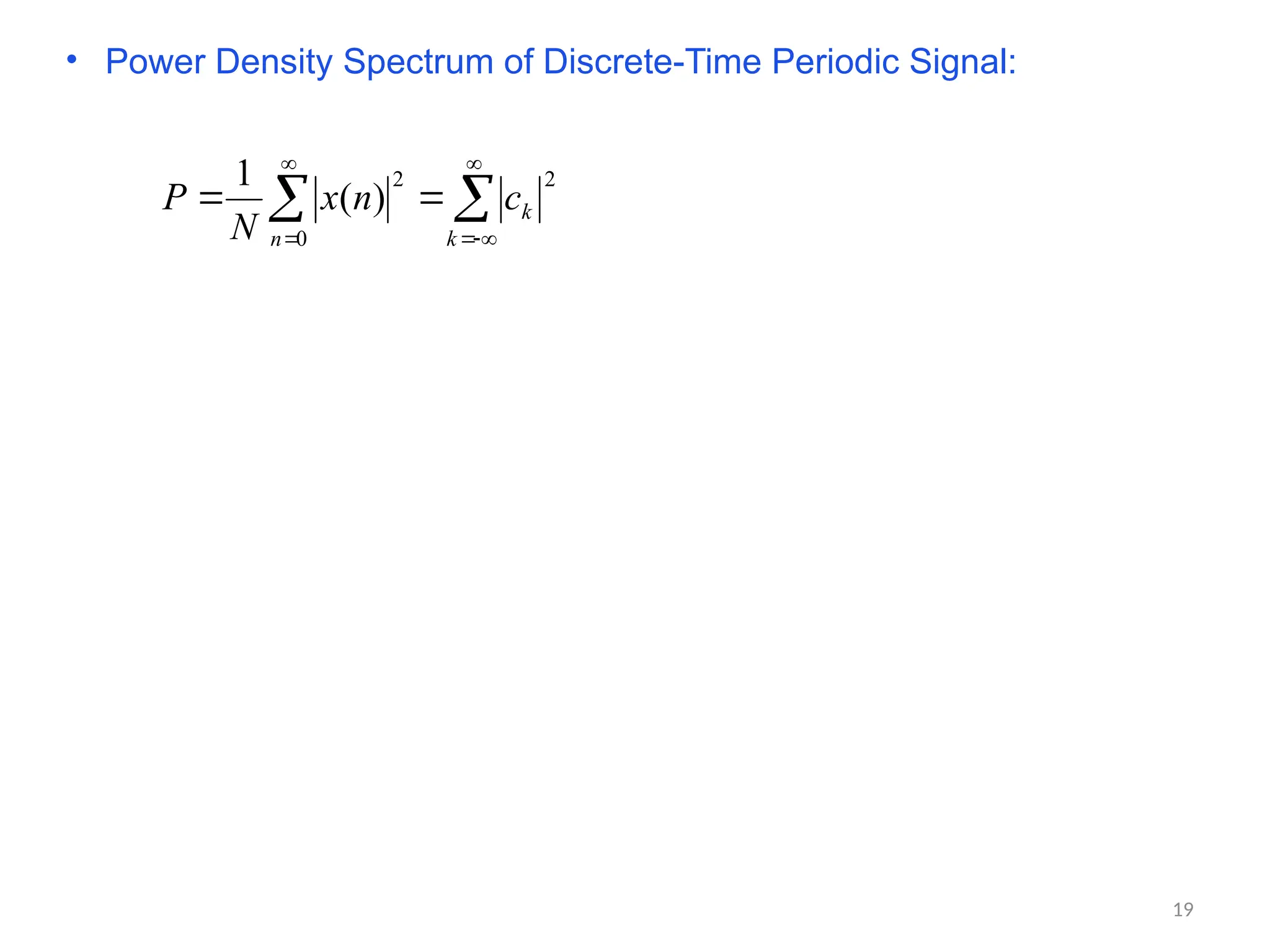
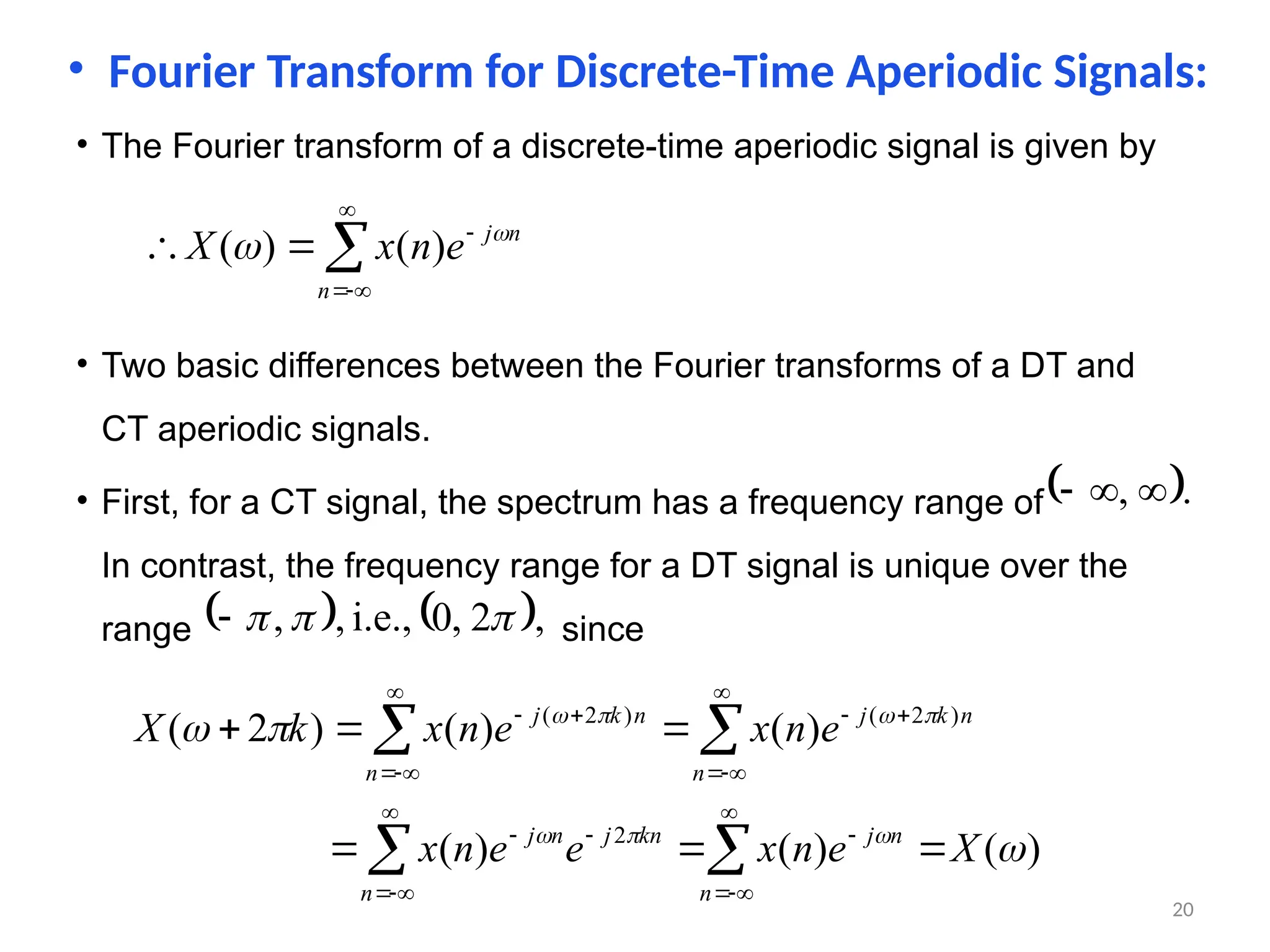
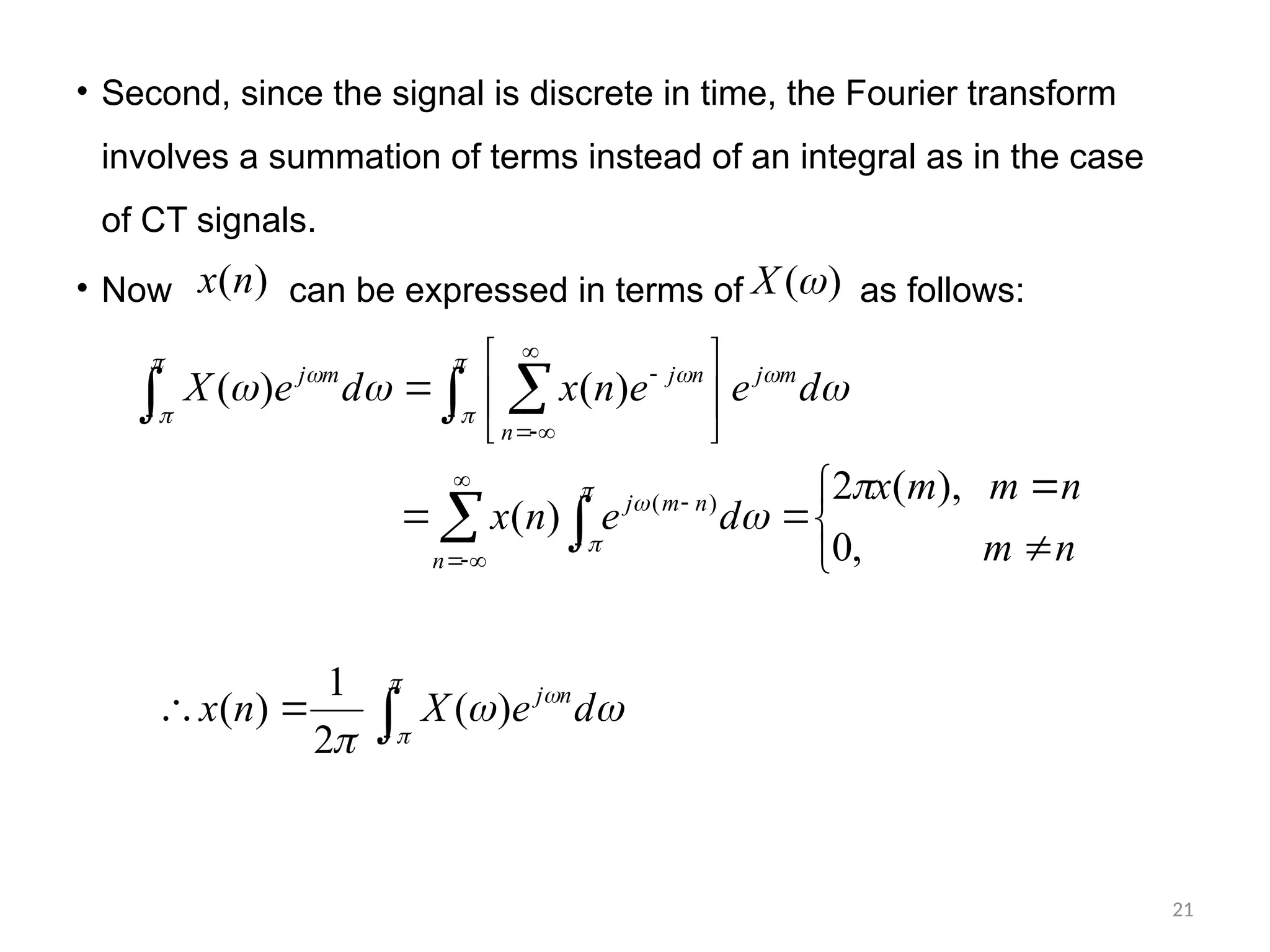
The document provides an overview of Fourier analysis in the context of signals and linear time-invariant (LTI) systems, detailing properties, mathematical representations, and applications. It discusses the response of LTI systems to various signals, highlighting the importance of convolution and the characterization of systems by their impulse responses. Additionally, it explains Fourier series and Fourier transforms for both continuous and discrete-time signals, including energy density spectra and the conservation of energy in time and frequency domains.
![• Linear System:
+ T
)
(
1 n
x
)
(
2 n
x
1
a
2
a
]
[
]
[
)
( 2
2
1
1 n
x
a
n
x
a
n
y
T
]
[
]
[
)
( 2
2
1
1 n
x
a
n
x
a
n
y T
T
+
)
(
1 n
x
)
(
2 n
x
1
a
2
a
T
T
System, T is linear if and only if
i.e., T satisfies the superposition principle.
)
(
)
( n
y
n
y
4](https://image.slidesharecdn.com/8685958-240914162223-52b56073/75/signals-and-systems-introduction-pptx-4-2048.jpg)
![• Time-Invariant System:
A system T is time invariant if and only if
)
(n
x T )
(n
y
implies that
)
( k
n
x T )
(
)
,
( k
n
y
k
n
y
Example: (a)
)
1
(
)
(
)
(
)
1
(
)
(
)
,
(
)
1
(
)
(
)
(
k
n
x
k
n
x
k
n
y
k
n
x
k
n
x
k
n
y
n
x
n
x
n
y
Since )
(
)
,
( k
n
y
k
n
y
, the system is time-invariant.
(b)
]
[
)
(
)
(
]
[
)
,
(
]
[
)
(
k
n
x
k
n
k
n
y
k
n
nx
k
n
y
n
nx
n
y
Since )
(
)
,
( k
n
y
k
n
y
, the system is time-variant. 5](https://image.slidesharecdn.com/8685958-240914162223-52b56073/75/signals-and-systems-introduction-pptx-5-2048.jpg)
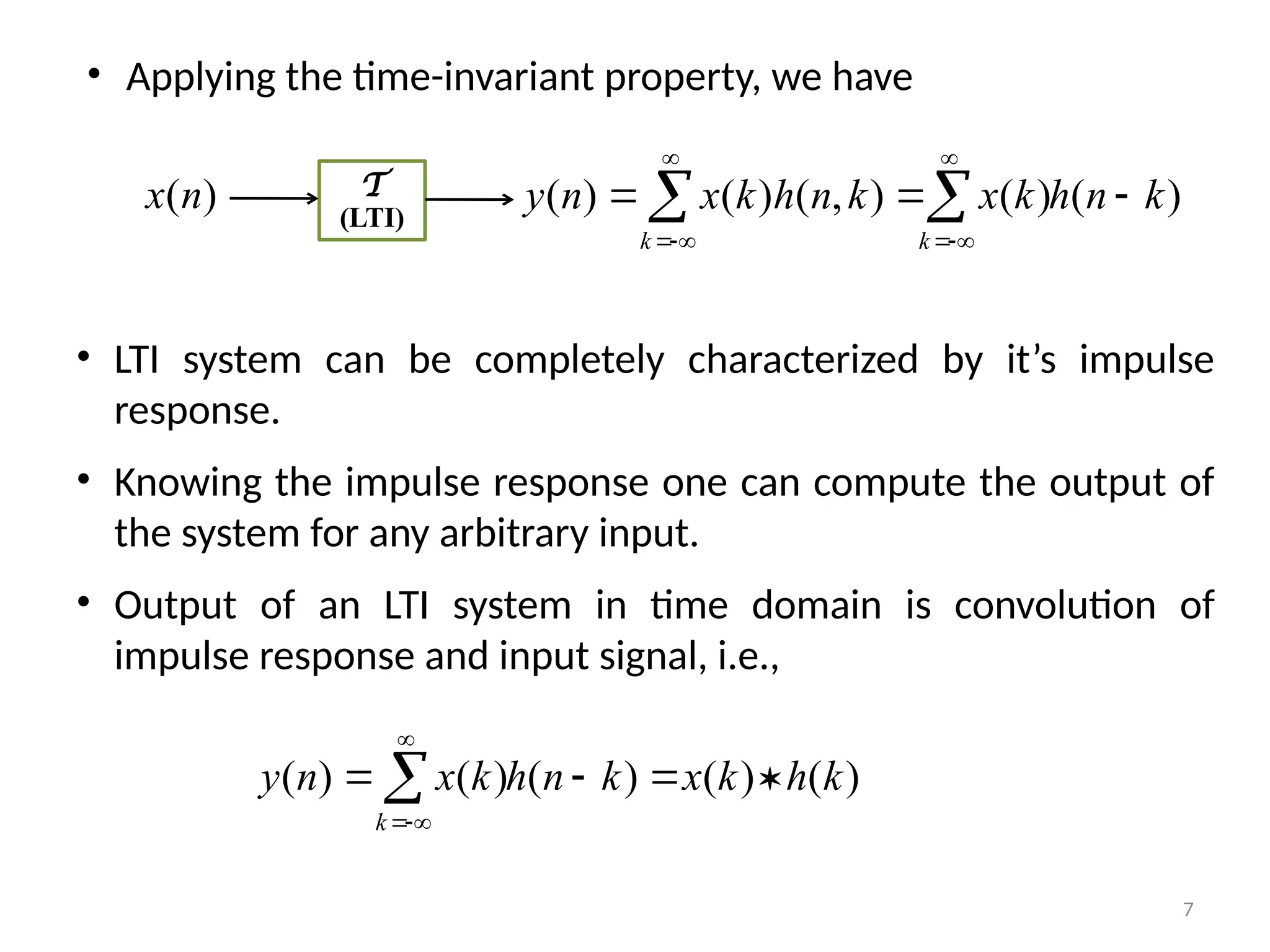
![• Any input signal x(n) can be represented as follows:
k
k
n
k
x
n
x )
(
)
(
)
(
• Consider an LTI system T.
1
0
for
,
0
0
for
,
1
]
[
n
n
n
0 n
1 2
-1
-2 …
…
Graphical representation of unit impulse.
)
( k
n
T )
,
( k
n
h
)
(n
T )
(n
h
• Now, the response of T to the unit impulse is
)
(n
x T )
,
(
)
(
]
[
)
( k
n
h
k
x
n
x
n
y
k
T
• Applying linearity properties, we have
6](https://image.slidesharecdn.com/8685958-240914162223-52b56073/75/signals-and-systems-introduction-pptx-6-2048.jpg)
![Properties of LTI systems
(Properties of convolution)
• Convolution is commutative
x[n] h[n] = h[n] x[n]
• Convolution is distributive
x[n] (h1[n] + h2[n]) = x[n] h1[n] + x[n] h2[n]
8](https://image.slidesharecdn.com/8685958-240914162223-52b56073/75/signals-and-systems-introduction-pptx-8-2048.jpg)
![• Convolution is Associative:
y[n] = h1[n] [ h2[n] x[n] ] = [ h1[n] h2[n] ] x[n]
h2
x[n] y[n]
h1h2
x[n] y[n]
h1
=
9](https://image.slidesharecdn.com/8685958-240914162223-52b56073/75/signals-and-systems-introduction-pptx-9-2048.jpg)
![23
Frequency Response of an LTI System
• For continuous-time LTI system
• For discrete-time LTI system
]
[n
h
n
j
e n
j
e
H
n
cos
H
n
H cos
)
(t
h
t
j
e
t
j
e
H
H
t
H
cos
t
cos ](https://image.slidesharecdn.com/8685958-240914162223-52b56073/75/signals-and-systems-introduction-pptx-23-2048.jpg)

































![Seller Deck - Presentation [Concert L2].PPTX](https://cdn.slidesharecdn.com/ss_thumbnails/sellerdeck-presentationconcertl2-251219171156-24982daf-thumbnail.jpg?width=640&height=640&fit=bounds)

















