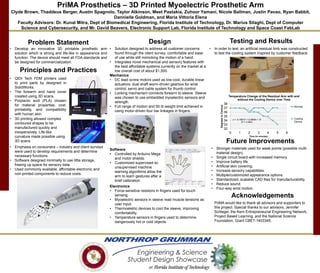
PriMA Prosthetics developed a 3D printed myoelectric prosthetic arm that is strong, lightweight, and life-like in appearance and function for under $1,500. The arm uses DC motors, force sensors, and myoelectric sensors to allow for a full range of motion and gestures through machine learning algorithms. It was designed through client and industry surveys to be comfortable, easy to use, and mimic the motion of a natural hand. 3D printing allowed for complex contours to be manufactured quickly and inexpensively.