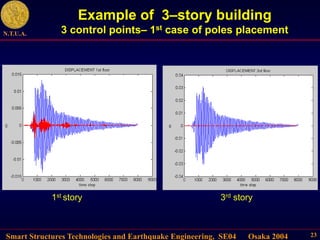
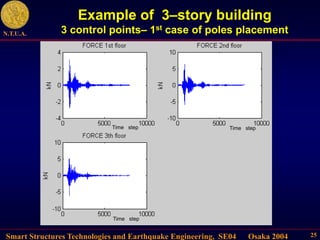
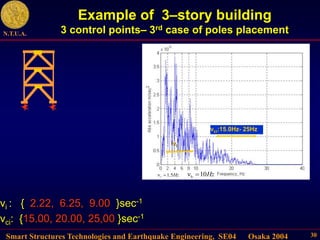
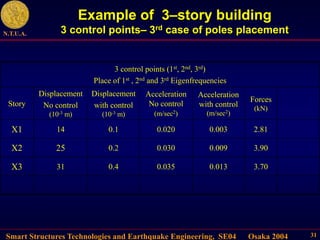
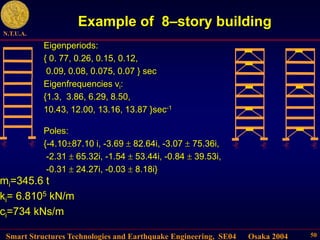
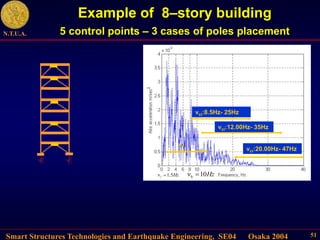
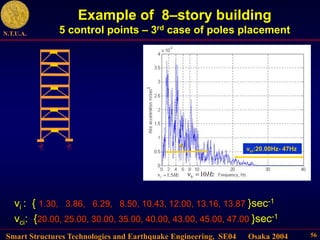
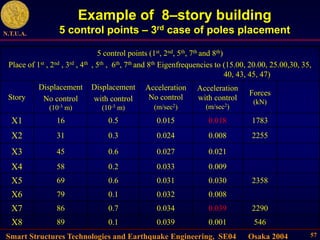
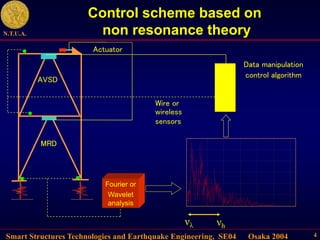
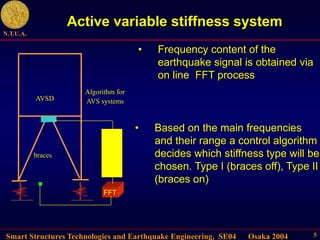
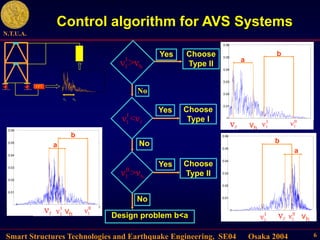
This document describes control algorithms for mitigating seismic hazard in structures. It presents strategies for placing the poles of a controlled structure based on the frequency content of an incoming earthquake. Algorithms are proposed for active variable stiffness systems and variable damping systems using pole placement and sliding mode control. Examples applying these algorithms to 3-story and 8-story buildings show reductions in displacement, acceleration, and forces compared to uncontrolled structures.
![Smart Structures Technologies and Earthquake Engineering, SE04 Osaka 2004
N.T.U.A.
17
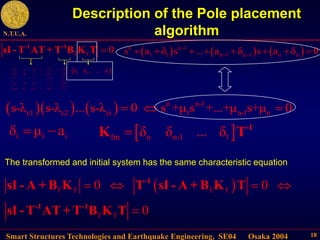
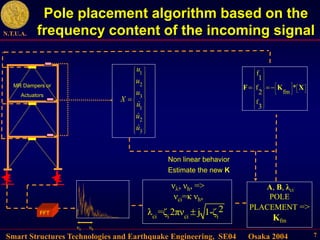
Description of the Pole placement
algorithm
.
f g g
ˆ ˆ F
-1 -1 -1 -1
p
X T ATX + T B T B a T B P
f f f
ˆ ˆ ˆ
- t -
F K X K TX = -K X
.
f f g g
ˆ ˆ
-1 -1 -1 -1
p
X T AT-T B K T X T B a T B P
Necessary and sufficient condition for arbitrary location of poles :
Controllability condition 2n-1
rank[ ... ]=2n
f f f
B AB A B
ˆ
X TX, T = SW
n-1
=[ ... ]
f f f
S B AB A B
n 1 n 2 1
n 2 n 3
1
a a a 1
a a 1 0
a 1 0 0
1 0 0 0
W =
ai coefficients of the
characteristic
polynomial |sI-A|
.
f g g
p
X AX+B F B a B P
f f 0
sI- A+B K
f
-
F K X](https://image.slidesharecdn.com/se04-230903103759-8dfa2927/85/SE04-ppt-12-320.jpg)