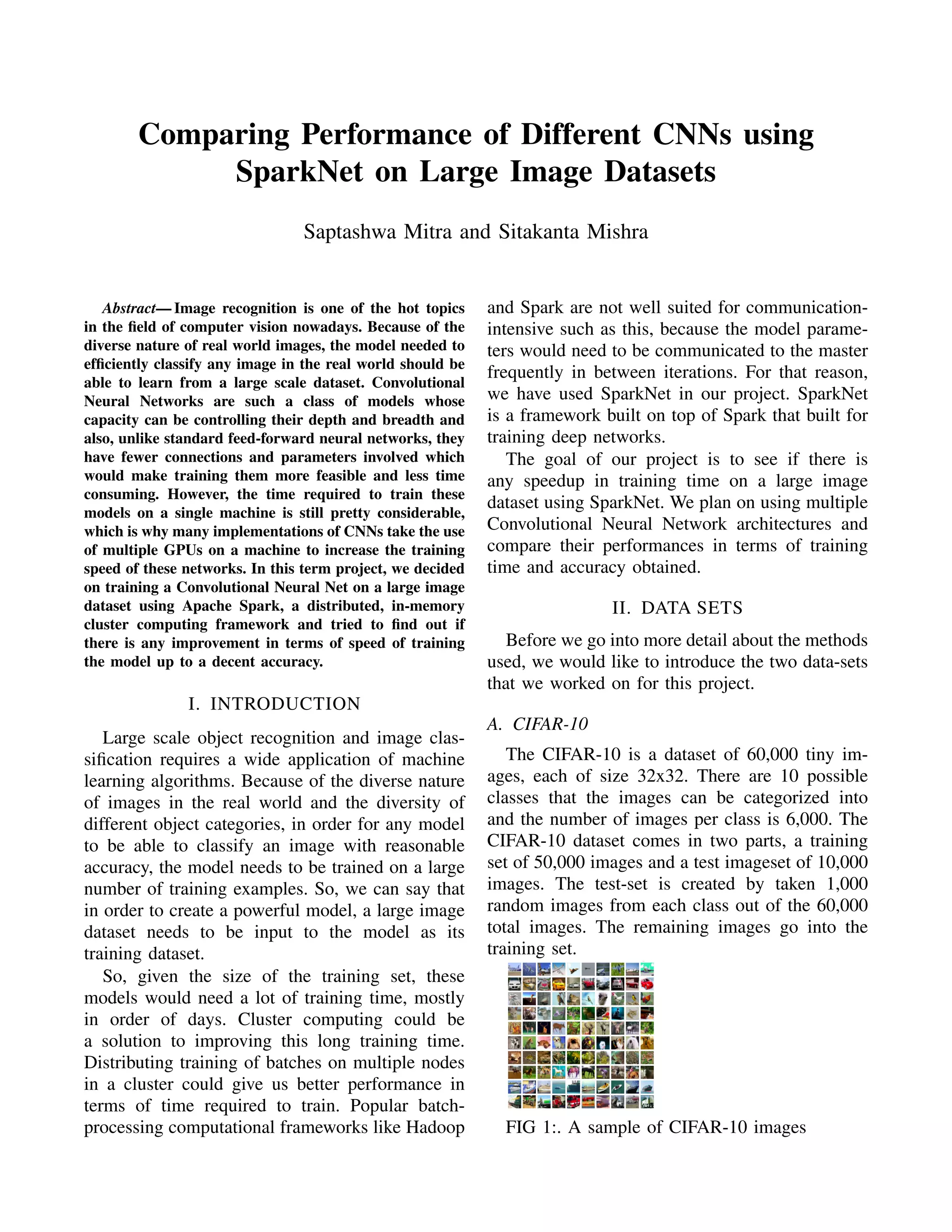
This document discusses comparing the performance of different convolutional neural networks (CNNs) when trained on large image datasets using Apache Spark. It summarizes the datasets used - CIFAR-10 and ImageNet - and preprocessing done to standardize image sizes. It then provides an overview of CNN architecture, including convolutional layers, pooling layers, and fully connected layers. Finally, it introduces SparkNet, a framework that allows training deep networks using Spark by wrapping Caffe and providing tools for distributed deep learning on Spark. The goal is to see if SparkNet can provide faster training times compared to a single machine by distributing training across a cluster.

![B. IMAGENET
ImageNet is a dataset of more than 1.2 million
images meant to be used in object recognition
research. This dataset has been the subject of the
ILSVRC challenge since 2010. The goal is to
correctly as little error rate on classification of
these images as possible. The training set itself
is about 1.2 million images and the validation set
consists of 50,000 images and the test set contains
100,000 images. Both the training and validation
imageset come with a text file identifying each
image filename to its corresponding category. A
test dataset of 150,000 images is also provided in
the imagenet data. The images in this dataset are
not of any fixed size and can be large images. We
have used the Imagenet dataset from 2012, which
has a total size of over 150 gb.
FIG 2:. A sample of Imagenet images
III. METHODS
Convolution Neural Networks have emerged as
the forerunners when it comes to classifying large
image datasets. Over the years, all the winners of
the ILSVRC competitions have come up with some
variation of a CNN model. Although simple learn-
ing tasks on smaller datasets can be easily done
without the use of CNNs, classifying thousands or
millions of images requires a training model with
a large training capacity.
Also, the immense complexity of the object
recognition task means that this problem cannot
be specified even by a large, so our model should
also have lots of prior knowledge to compensate
for all the data we dont have as explained below.
A. Data Preprocessing
Our software requires the images to be input
at a fixed dimension. Cifar-10s images are all of
the same dimension. But, since the input images
of ImageNet are varying in resolution, we have
used the method used in AlexNets[1] paper to get
around the problem.
Here, we down-sampled the images to a fixed
resolution of 256 x 256. Given a rectangular image,
we first rescaled the image such that the shorter
side was of length 256, and then cropped out the
central 256 x 256 patch from the resulting image.
These images are to be treated as input to our
model. During training also, our model takes a 227
x 227 random crop of each input image to avoid
overfitting.
B. Convolutional Neural Networks
Convolutional Neural Networks (CNN) are a
specialized type of neural network that are de-
signed to train large sized training data having a
grid-like topology. Image data fit this description
perfectly.
A convolution network is a specialized type of
neural network that prefers convolution instead on
general matrix multiplication. CNN architecture
make the explicit assumption that the inputs are
images, which allows us to encode certain prop-
erties into the architecture. These then make the
forward function more efficient to implement and
vastly reduce the amount of parameters in the
network.
Since for regular neural network, each neuron
in one layer is fully connected to neurons in the
previous layer, the problem at hand would become
very complicated and time consuming if regular
neural networks were used, simply because of the
huge number of parameters that would be involved
in the training process.
A convolution Network consists of a sequence
of layers. The purpose of these layers is to take
one volume of input activations and convert them
into output activations. There are three main types
of layers that are used to build ConvNet archi-
tectures: Convolutional Layer(CONV), Pooling
Layer(POOL), and Fully-Connected Layer (FC,
exactly as seen in regular Neural Networks). These
layers get stacked in different combinations to get
different implementations of a ConvNet architec-
ture that we see today.
Convolutional Layer: The CONV layers pa-
rameters consist of a set of learnable filters. Every
filter is small spatially (along width and height),
but extends through the full depth of the input
volume. During the forward pass, we slide (con-
volve) each filter across the width and height](https://image.slidesharecdn.com/94df28c8-d098-444c-b01f-5d079e0ffd85-170202220543/85/Saptashwa_Mitra_Sitakanta_Mishra_Final_Project_Report-2-320.jpg)
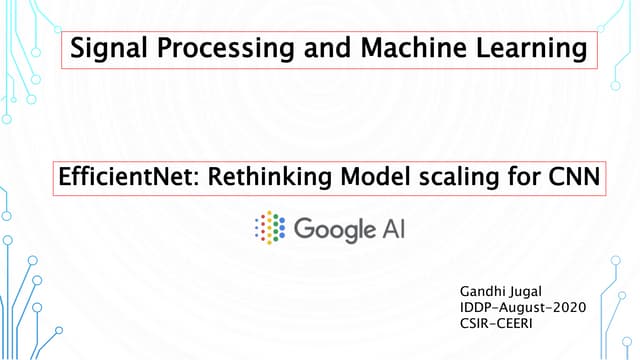
![of the input volume and compute dot products
between the entries of the filter and the input
at any position. As we slide the filter over the
width and height of the input volume we will
produce a 2-dimensional activation map that gives
the responses of that filter at every spatial position.
Following is an example of how multiple activation
maps from using multiple filters can be clubbed
together to form an input for the next stage of a
CNN. Each convolution layer is also followed by
an elementwise activation function (ReLU).
FIG 3:. An example of Convolutional layer
Mathematically we can say, a convolution
layer:
• Accepts a volume of size W1xH1xD1
• Requires four hyperparameters
– Number of filters (K)
– Spatial extent of the filters (F)
– Stride (S)
– Size of zero Padding (P)
• Produces an output of dimension
W2xH2xD2 where:
– W2 = (W1F + 2P)/S + 1W2 =
(W1F + 2P)/S + 1
– H2 = (H1F + 2P)/S + 1
– D2 = K
Pooling Layer: Periodically, in between each
convolution layers, we insert Pooling Layers. The
purpose of pooling layers is to down-sample the
volume spatially.
A pooling function replaces the output of the
net at certain location with a summary statistic of
its nearby outputs. We have used max-pooling for
our experiment. In the Max-pooling operation, the
maximum output of a rectangular area is reported.
Pooling helps us to achieve invariance to trans-
formation as well as invariance to inputs of varying
size.
Fully Connected Layer: Neurons in a fully
connected layer have full connections to all ac-
tivations in the previous layer, as seen in regular
Neural Networks. Their activations can hence be
computed with a matrix multiplication followed by
a bias offset. The final layer of a CNN must always
be fully connected.
FIG 4:. An example of Max Pooling
So essentially, a CNN is just a sequence of the
following structure:
INPUT− > [[CONV − > RELU] ∗ N− >
POOL?] ∗ M− > [FC− > RELU] ∗ K− > FC
C. SparkNet
As mentioned before, for our project we have
worked with SparkNet, which is a framework for
training deep networks in Spark. It includes a
convenient interface for reading data from Spark
RDDs, a Scala interface to the Caffe deep learning
framework and lightweight multidimensional ten-
sor library. It builds on Apache Spark and the Caff
deep learning library.
In the implementation, the Net class wraps Caffe
and exposes a simple API containing methods. The
NetParams type specifies a network architecture
and the weightCollection type is map from layer
names to list of weights. It allows the manipu-
lation of network components and the storage of
weights and outputs for individual layers. NDArray
class, which is a lightweight multi-dimensional
tensor library which facilitates manipulation of
data and weights without copying memory from
Caffe. Spark consists of a single master node and
a number of worker nodes. The data is split among
the Spark workers. In every iteration, the Spark
master broadcasts the model parameters to each
worker. Each worker runs SGD on the model with
its subset of data for a fixed number of iterations
or for a fixed length of time. Then the resulting
model parameters on each worker are sent to
the master and averaged to form the new model
parameters.[3]](https://image.slidesharecdn.com/94df28c8-d098-444c-b01f-5d079e0ffd85-170202220543/85/Saptashwa_Mitra_Sitakanta_Mishra_Final_Project_Report-3-320.jpg)
![Caffe provides us with a specific format to
specify a CNN architecture to the program. Using
this format, we have specified the different CNN
architecture we have used. The following is a
sample code for specifying the protocol for a layer:
FIG 5:. Layer Specification on Caffe
D. Different CNN architecture
Some popular CNN architecture that we at-
tempted to implement were:
For ImageNet dataset:
Alexnet
[227x227x3]INPUT
[55x55x96]CONV 1 :
9611x11filtersatstride4, pad0
[27x27x96]MAXPOOL1 :
3x3filtersatstride2
[27x27x96]NORM1 : Normalizationlayer
[27x27x256]CONV 2 :
2565x5filtersatstride1, pad2
[13x13x256]MAXPOOL2 :
3x3filtersatstride2
[13x13x256]NORM2 : Normalizationlayer
[13x13x384]CONV 3 :
3843x3filtersatstride1, pad1
[13x13x384]CONV 4 :
3843x3filtersatstride1, pad1
[13x13x256]CONV 5 :
2563x3filtersatstride1, pad1
[6x6x256]MAXPOOL3 :
3x3filtersatstride2
[4096]FC6 : 4096neurons
[4096]FC7 : 4096neurons
[1000]FC8 : 1000neurons(classscores)
For Cifar-10
We were not able to implement AlexNet due to
reasons mentioned later. As a result, we decided
to train a set of different CNN architecture on the
Cifar-10 dataset. We tested out 2 CNNs on the
Cifar-10 dataset to see which one trained faster
and which one gave a better accuracy after a
certain number of iterations. The following are the
architecture we tried out on Cifar-10:
Trial #1:
32x32x3INPUT
CONV 1 : 5x5x3filtersatstride1, pad2
MAXPOOL1 : 3x3filtersatstride2
CONV 2 : 5x5x3filtersatstride1, pad2
ReLU
AV GPOOL2 : 3x3filtersatstride2
CONV 3 : 5x5x3filtersatstride1, pad2
ReLU
AV GPOOL3 : 3x3filtersatstride2
FC(SoftMax)
FC
FC(Softmaxwithloss)[10neurons]
Trial #2:
32x32x3INPUT
CONV 1 : 5x5x3filtersatstride1, pad2
MAXPOOL1 : 3x3filtersatstride2
CONV 2 : 5x5x3filtersatstride1, pad2
ReLU
AV GPOOL2 : 3x3filtersatstride2
CONV 3 : 5x5x3filtersatstride1, pad2
ReLU
AV GPOOL3 : 3x3filtersatstride2
CONV 4 : 5x5x3filtersatstride1, pad2
ReLU
AV GPOOL4 : 3x3filtersatstride2
FC(SoftMax)
FC
FC(Softmaxwithloss)[10neurons]
IV. RESULTS AND DISCUSSION
A. Working with ImageNet
We encountered a roadblock while training the
ImageNet dataset on a spark cluster we created
on the CS120 lab machines. We had added 23
nodes on our cluster, deployed Spark on them and
installed SparkNet on top. However, the job that
we submitted failed after running for a few hours.
We received RPC timeout exception on sub-
mitting our jobs. We believe it has to do with](https://image.slidesharecdn.com/94df28c8-d098-444c-b01f-5d079e0ffd85-170202220543/85/Saptashwa_Mitra_Sitakanta_Mishra_Final_Project_Report-4-320.jpg)

![bugs were fixed with equal contribution of both
the team mates.
REFERENCES
[1] 1. Alex Krizhevsky; Ilya Sutskever; Geoffrey E. Hinton.
”ImageNet Classification with Deep Convolutional Neural
Networks”.
[2] http://cs231n.github.io/convolutional-networks/
[3] Philipp Moritz; Robert Nishihara; Ion Stoica; Michael I.
Jordan . ”SPARKNET: TRAINING DEEP NETWORKS IN
SPARK”.
[4] https://arxiv.org/pdf/1311.2901v3.pdf
[5] http://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=7753615
[6] Matei Zaharia, Mosharaf Chowdhury, Michael J. Franklin,
Scott Shenker, Ion Stoica Spark: Cluster Computing with
Working Sets
[7] https://www.cs.toronto.edu/ kriz/learning-features-2009-
TR.pdf
[8] http://image-net.org/](https://image.slidesharecdn.com/94df28c8-d098-444c-b01f-5d079e0ffd85-170202220543/85/Saptashwa_Mitra_Sitakanta_Mishra_Final_Project_Report-6-320.jpg)



![[PR12] Inception and Xception - Jaejun Yoo](https://cdn.slidesharecdn.com/ss_thumbnails/pr12inceptionandxception-jaejunyoo-170910140157-thumbnail.jpg?width=640&height=640&fit=bounds)


















![[PR12] PR-050: Convolutional LSTM Network: A Machine Learning Approach for Pr...](https://cdn.slidesharecdn.com/ss_thumbnails/pr12-convlstm-171126135417-thumbnail.jpg?width=640&height=640&fit=bounds)