Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Hiroaki Kaneda
PPTX, PDF
1,002 views
Ros,gazeboとchainerを用いた畳込みニューラルネットワークによる3次元形状の学習
畳み込みニューラルネットワークは画像の分類タスクにおいて高い認識率を実現した。これを3次元空間データに応用し物体の認識に応用してみた。
Technology
◦
Related topics:
Neural Networks
•
Read more
2
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 15
2
/ 15
3
/ 15
4
/ 15
5
/ 15
6
/ 15
7
/ 15
8
/ 15
9
/ 15
10
/ 15
11
/ 15
12
/ 15
13
/ 15
14
/ 15
15
/ 15
More Related Content
PDF
あなたの業務に機械学習を活用する5つのポイント
by
Shohei Hido
PPTX
灯油配送計画の最適化に向けた ヒューリスティクスの開発に関する研究
by
harmonylab
PPTX
ECサイトにおける商品紹介文の作成支援システムの開発と評価に関する研究
by
harmonylab
PDF
Node-RED TIPS:functionノード間で関数を共有する方法
by
Kazuki Saito
PDF
はじめよう多変量解析~主成分分析編~
by
宏喜 佐野
PPTX
プロジェクトマネージャのための機械学習工学入門
by
Nobukazu Yoshioka
PDF
機械学習システム開発案件の事例紹介
by
BrainPad Inc.
PDF
03 「重回帰分析」の入門
by
Shuhei Ichikawa
あなたの業務に機械学習を活用する5つのポイント
by
Shohei Hido
灯油配送計画の最適化に向けた ヒューリスティクスの開発に関する研究
by
harmonylab
ECサイトにおける商品紹介文の作成支援システムの開発と評価に関する研究
by
harmonylab
Node-RED TIPS:functionノード間で関数を共有する方法
by
Kazuki Saito
はじめよう多変量解析~主成分分析編~
by
宏喜 佐野
プロジェクトマネージャのための機械学習工学入門
by
Nobukazu Yoshioka
機械学習システム開発案件の事例紹介
by
BrainPad Inc.
03 「重回帰分析」の入門
by
Shuhei Ichikawa
What's hot
PDF
ベイズ統計によるデータ解析
by
Kunihiro Hisatsune
PPTX
Stem проект в школе от идеи до воплощения
by
metodist_selid
PDF
Data-Centric AIの紹介
by
Kazuyuki Miyazawa
PPTX
画像認識と深層学習
by
Yusuke Uchida
PPT
будова і функції шкіри
by
svetorada999
PPTX
「視線」を科学する。 Media pipeを用いた視線計測の手法について-
by
ssuser357a3e1
PDF
Mystectvo 1-klas-lobova-2018
by
kreidaros1
PPTX
Python基礎その2
by
大貴 末廣
PPTX
【DL輪読会】SimCSE: Simple Contrastive Learning of Sentence Embeddings (EMNLP 2021)
by
Deep Learning JP
PDF
合成経路探索 -論文まとめ- (PFN中郷孝祐)
by
Preferred Networks
PPTX
Dimensionality reduction with t-SNE(Rtsne) and UMAP(uwot) using R packages.
by
Satoshi Kato
PDF
異常検知
by
Yasuaki Sakamoto
PPTX
【卒業論文】大規模言語モデルを用いたマニュアル文章修正手法に関する研究
by
harmonylab
PDF
【DL輪読会】StyleCLIP: Text-Driven Manipulation of StyleGAN Imagery
by
Deep Learning JP
PPTX
презентація до уроку "Будова і функції шкіри"
by
Наталья Полищук
PDF
それでも私が研究を続ける理由
by
Hitomi Yanaka
PDF
4 データ間の距離と類似度
by
Seiichi Uchida
PDF
データサイエンティストの仕事とデータ分析コンテスト
by
Ken'ichi Matsui
PDF
「R言語による Random Forest 徹底入門 -集団学習による分類・予測-」 - #TokyoR #11
by
Koichi Hamada
PDF
【論文紹介】ProtoMF: Prototype-based Matrix Factorization for Effective and Explain...
by
Kosetsu Tsukuda
ベイズ統計によるデータ解析
by
Kunihiro Hisatsune
Stem проект в школе от идеи до воплощения
by
metodist_selid
Data-Centric AIの紹介
by
Kazuyuki Miyazawa
画像認識と深層学習
by
Yusuke Uchida
будова і функції шкіри
by
svetorada999
「視線」を科学する。 Media pipeを用いた視線計測の手法について-
by
ssuser357a3e1
Mystectvo 1-klas-lobova-2018
by
kreidaros1
Python基礎その2
by
大貴 末廣
【DL輪読会】SimCSE: Simple Contrastive Learning of Sentence Embeddings (EMNLP 2021)
by
Deep Learning JP
合成経路探索 -論文まとめ- (PFN中郷孝祐)
by
Preferred Networks
Dimensionality reduction with t-SNE(Rtsne) and UMAP(uwot) using R packages.
by
Satoshi Kato
異常検知
by
Yasuaki Sakamoto
【卒業論文】大規模言語モデルを用いたマニュアル文章修正手法に関する研究
by
harmonylab
【DL輪読会】StyleCLIP: Text-Driven Manipulation of StyleGAN Imagery
by
Deep Learning JP
презентація до уроку "Будова і функції шкіри"
by
Наталья Полищук
それでも私が研究を続ける理由
by
Hitomi Yanaka
4 データ間の距離と類似度
by
Seiichi Uchida
データサイエンティストの仕事とデータ分析コンテスト
by
Ken'ichi Matsui
「R言語による Random Forest 徹底入門 -集団学習による分類・予測-」 - #TokyoR #11
by
Koichi Hamada
【論文紹介】ProtoMF: Prototype-based Matrix Factorization for Effective and Explain...
by
Kosetsu Tsukuda
Similar to Ros,gazeboとchainerを用いた畳込みニューラルネットワークによる3次元形状の学習
PPTX
Rosとgazeboを使った3d空間での3次元畳み込みニューラルネットによる物体認識
by
Hiroaki Kaneda
PDF
Nested RNSを用いたディープニューラルネットワークのFPGA実装
by
Hiroki Nakahara
PPTX
畳み込みニューラルネットワークの研究動向
by
Yusuke Uchida
PPTX
畳み込みニューラルネットワークの高精度化と高速化
by
Yusuke Uchida
PDF
CVPR2018のPointCloudのCNN論文とSPLATNet
by
Takuya Minagawa
PDF
ROS Tutorial 02 - CIT
by
Daiki Maekawa
Rosとgazeboを使った3d空間での3次元畳み込みニューラルネットによる物体認識
by
Hiroaki Kaneda
Nested RNSを用いたディープニューラルネットワークのFPGA実装
by
Hiroki Nakahara
畳み込みニューラルネットワークの研究動向
by
Yusuke Uchida
畳み込みニューラルネットワークの高精度化と高速化
by
Yusuke Uchida
CVPR2018のPointCloudのCNN論文とSPLATNet
by
Takuya Minagawa
ROS Tutorial 02 - CIT
by
Daiki Maekawa
Ros,gazeboとchainerを用いた畳込みニューラルネットワークによる3次元形状の学習
1.
ROS,GAZEBOとCHAINER を用いた畳込みニューラル ネットワークによる3次元 形状の学習 ROS Japan UG
#19 機械学習・AI勉強会
2.
自己紹介 金田浩明(かねだひろあき) ➤ 株式会社ブリリアントサービス勤務 ➤
ソフトウェアエンジニア ➤ Android技術者 ➤ 移動型ロボット、ROS、センサー ➤ https://www.facebook.com/hiroaki.kaneda
3.
ROS入門記事なども書いてます ➤ 詳しい内容は http://bril-tech.blogspot.jp
4.
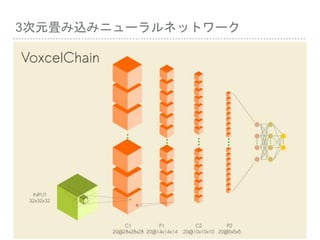
3次元畳み込みニューラルネットワーク
5.
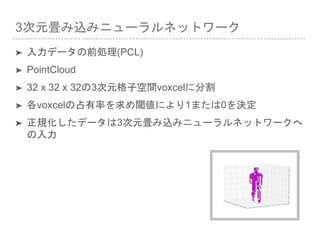
3次元畳み込みニューラルネットワーク ➤ 入力データの前処理(PCL) ➤ PointCloud ➤
32 x 32 x 32の3次元格子空間voxcelに分割 ➤ 各voxcelの占有率を求め閾値により1または0を決定 ➤ 正規化したデータは3次元畳み込みニューラルネットワークへ の入力
6.
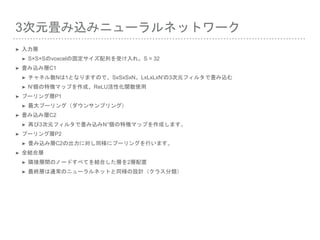
3次元畳み込みニューラルネットワーク ➤ 入力層 ➤ S×S×Sのvoxcelの固定サイズ配列を受け入れ。S
= 32 ➤ 畳み込み層C1 ➤ チャネル数Nは1となりますので、SxSxSxN。LxLxLxN'の3次元フィルタで畳み込む ➤ N'個の特徴マップを作成、ReLU活性化関数使用 ➤ プーリング層P1 ➤ 最大プーリング(ダウンサンプリング) ➤ 畳み込み層C2 ➤ 再び3次元フィルタで畳み込みN’'個の特徴マップを作成します。 ➤ プーリング層P2 ➤ 畳み込み層C2の出力に対し同様にプーリングを行います。 ➤ 全結合層 ➤ 隣接層間のノードすべてを結合した層を2層配置 ➤ 最終層は通常のニューラルネットと同様の設計(クラス分類)
7.
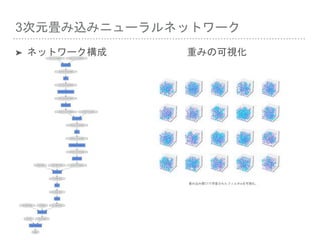
3次元畳み込みニューラルネットワーク ➤ ネットワーク構成 重みの可視化 畳み込み層C1で学習されたフィルタwを可視化。
8.
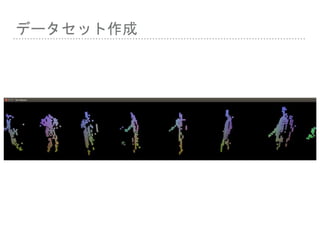
データセット作成 ➤ 実データ収集は難しい ➤ 実用的な認識率を出すには大量のデータセットが必要 ➤
ロボットシミュレータgazebo ➤ Gazebo内で仮想ToFセンサーを搭載した仮想ロボットを稼働 させ、ToFセンサーデータを集める
9.
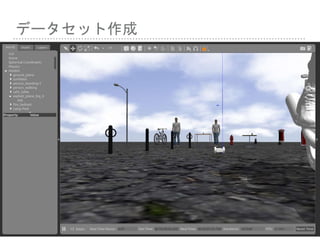
データセット作成 ➤ ロボットシミュレータgazebo
10.
データセット作成
11.
データセット作成
12.
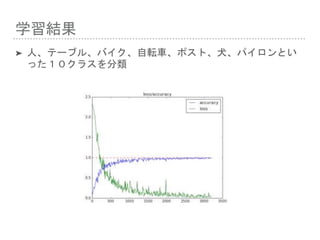
学習結果 ➤ 人、テーブル、バイク、自転車、ポスト、犬、パイロンとい った10クラスを分類
13.
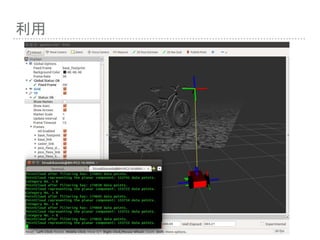
利用
14.
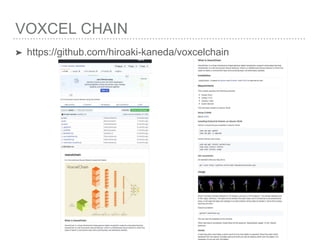
VOXCEL CHAIN ➤ https://github.com/hiroaki-kaneda/voxcelchain
15.
ご静聴ありがとうございました
Download