Download as PDF, PPTX







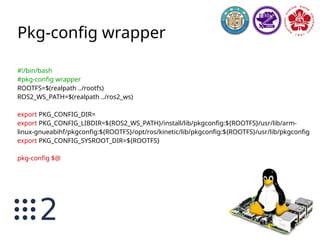
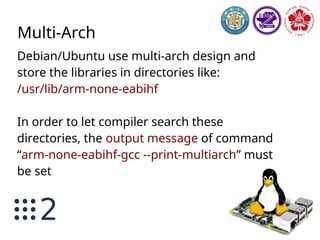


This document discusses cross compiling ROS2 for autonomous cars on ARM-based machines like the Raspberry Pi. It covers using CMake and custom pkg-config wrappers to set up the toolchain and libraries for cross compiling. It also addresses issues like broken symlinks in root filesystems and setting the multiarch output to properly find ARM libraries. Native building on the target machine is presented as an alternative by adding swap memory. Links are provided to related projects and resources.

















![[MathWorks] Versioning Infrastructure](https://cdn.slidesharecdn.com/ss_thumbnails/mathworks-michaelmirmanpv4-130523185914-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)


































![Attack surfaces and attack tress[inform]](https://cdn.slidesharecdn.com/ss_thumbnails/lecture03-260108015941-a4dee53b-thumbnail.jpg?width=640&height=640&fit=bounds)






