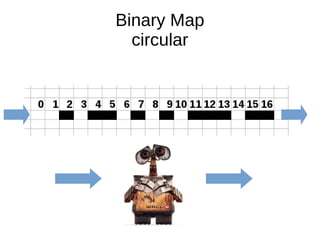
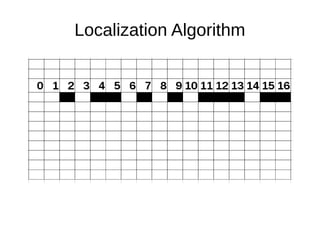
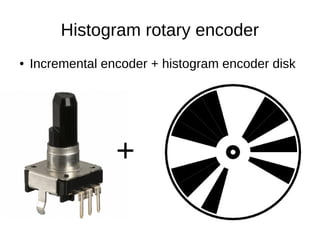
This document discusses robot localization. It introduces localization and its importance for autonomous robots and vehicles. It then describes two localization algorithms: one using a simple binary map and sensed landmarks, and another using a histogram to represent probabilistic location beliefs. It also discusses using rotary encoders combined with a specialized "histogram encoder disk" to localize based on wheel movements. The document concludes with a planned demonstration of a localization system using ultrasonic sensors, switches, and a histogram rotary encoder.





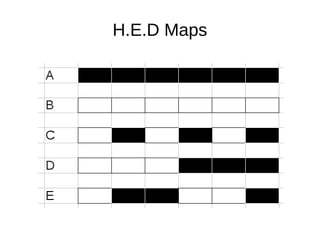
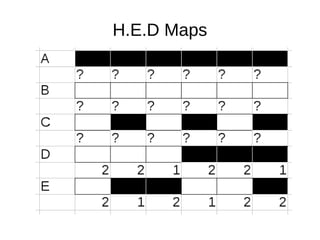
![Algorithms to create the best maps
● Count the repetitions
– Slow
– Up to 14 bits
● Count the number of steps for 100% certain
– Worked for 24 bits
– '001011110101000011001110', 4.66
● [4, 5, 4, 5, 4, 5, 4, 5, 5, 5, 4, 5, 4, 5, 5, 4,5,..., 5]
– '000000000000111101001011', 5.83
● [12, 12, 11, 10, 9, 8, 7, 6, 5, 4, 4, 4, 4, 4, 4, 4, 4, 4,..., 4]](https://image.slidesharecdn.com/95c6e21e-5460-4a81-8ca1-bec7b831e6dd-160423200929/85/robotlocalization_02-63-320.jpg)