Download as PDF, PPTX
![Co-funded by the Lifelong Learning programme of the European Union
[project ref: 543577-LLP-1-2013-1-UK-KA3-KA3MP]
The European Commission support for the production of this publication
does not constitute an endorsement of the contents which reflects the
views only of the authors, and the Commission cannot be held responsi-ble
for any use which may be made of the information contained therein.
Educational Robotics for students
with learning disabilities](https://image.slidesharecdn.com/itagpresv4-novid-161027113055/75/Robotics-and-Education-EduRob-Project-Results-Launch-1-2048.jpg)
![Co-funded by the Lifelong Learning programme of the European Union
[project ref: 543577-LLP-1-2013-1-UK-KA3-KA3MP]
The European Commission support for the production of this publication
does not constitute an endorsement of the contents which reflects the
views only of the authors, and the Commission cannot be held responsi-ble
for any use which may be made of the information contained therein.
Robotic Learning Demos
Dr Andy Burton and Nick Shopland
Co-funded by the Lifelong Learning programme of the European Union
[project ref: 543577-LLP-1-2013-1-UK-KA3-KA3MP]
The European Commission support for the production of this publication
does not constitute an endorsement of the contents which reflects the
views only of the authors, and the Commission cannot be held responsi-ble
for any use which may be made of the information contained therein.](https://image.slidesharecdn.com/itagpresv4-novid-161027113055/75/Robotics-and-Education-EduRob-Project-Results-Launch-10-2048.jpg)

![Co-funded by the Lifelong Learning programme of the European Union
[project ref: 543577-LLP-1-2013-1-UK-KA3-KA3MP]
The European Commission support for the production of this publication
does not constitute an endorsement of the contents which reflects the
views only of the authors, and the Commission cannot be held responsi-ble
for any use which may be made of the information contained therein.
Robots in Schools – initial findings
Joanna Kossewska, Lorenzo Desideri
Co-fundeby the Lifelong Learning programme of the European Union
[project ref: 543577-LLP-1-2013-1-UK-KA3-KA3MP]
The European Commission support for the production of this publication
does not constitute an endorsement of the contents which reflects the
views only of the authors, and d the Commission cannot be held
responsi-ble for any use which may be made of the information contained
therein.](https://image.slidesharecdn.com/itagpresv4-novid-161027113055/75/Robotics-and-Education-EduRob-Project-Results-Launch-20-2048.jpg)



![Co-funded by the Lifelong Learning programme of the European Union
[project ref: 543577-LLP-1-2013-1-UK-KA3-KA3MP]
The European Commission support for the production of this publication
does not constitute an endorsement of the contents which reflects the
views only of the authors, and the Commission cannot be held responsi-ble
for any use which may be made of the information contained therein.
Interactive Hands-On session
Co-funded by the Lifelong Learning programme of the European Union
[project ref: 543577-LLP-1-2013-1-UK-KA3-KA3MP]
The European Commission support for the production of this publication
does not constitute an endorsement of the contents which reflects the
views only of the authors, and the Commission cannot be held responsi-ble
for any use which may be made of the information contained therein.](https://image.slidesharecdn.com/itagpresv4-novid-161027113055/75/Robotics-and-Education-EduRob-Project-Results-Launch-37-2048.jpg)
![Co-funded by the Lifelong Learning programme of the European Union
[project ref: 543577-LLP-1-2013-1-UK-KA3-KA3MP]
The European Commission support for the production of this publication
does not constitute an endorsement of the contents which reflects the
views only of the authors, and the Commission cannot be held responsi-ble
for any use which may be made of the information contained therein.
Open discussion of use of robots in
SEN Education
• Co-funded by the Lifelong Learning programme of the European Union [project
ref: 543577-LLP-1-2013-1-UK-KA3-KA3MP]
• The European Commission support for the production of this publication does not
constitute an endorsement of the contents which reflects the views only of the
authors, and the Commission cannot be held responsi-ble for any use which may
be made of the information contained therein.](https://image.slidesharecdn.com/itagpresv4-novid-161027113055/75/Robotics-and-Education-EduRob-Project-Results-Launch-39-2048.jpg)
![Co-funded by the Lifelong Learning programme of the European Union
[project ref: 543577-LLP-1-2013-1-UK-KA3-KA3MP]
The European Commission support for the production of this publication
does not constitute an endorsement of the contents which reflects the
views only of the authors, and the Commission cannot be held responsi-ble
for any use which may be made of the information contained therein.
Thank you
•Any questions?](https://image.slidesharecdn.com/itagpresv4-novid-161027113055/75/Robotics-and-Education-EduRob-Project-Results-Launch-41-2048.jpg)
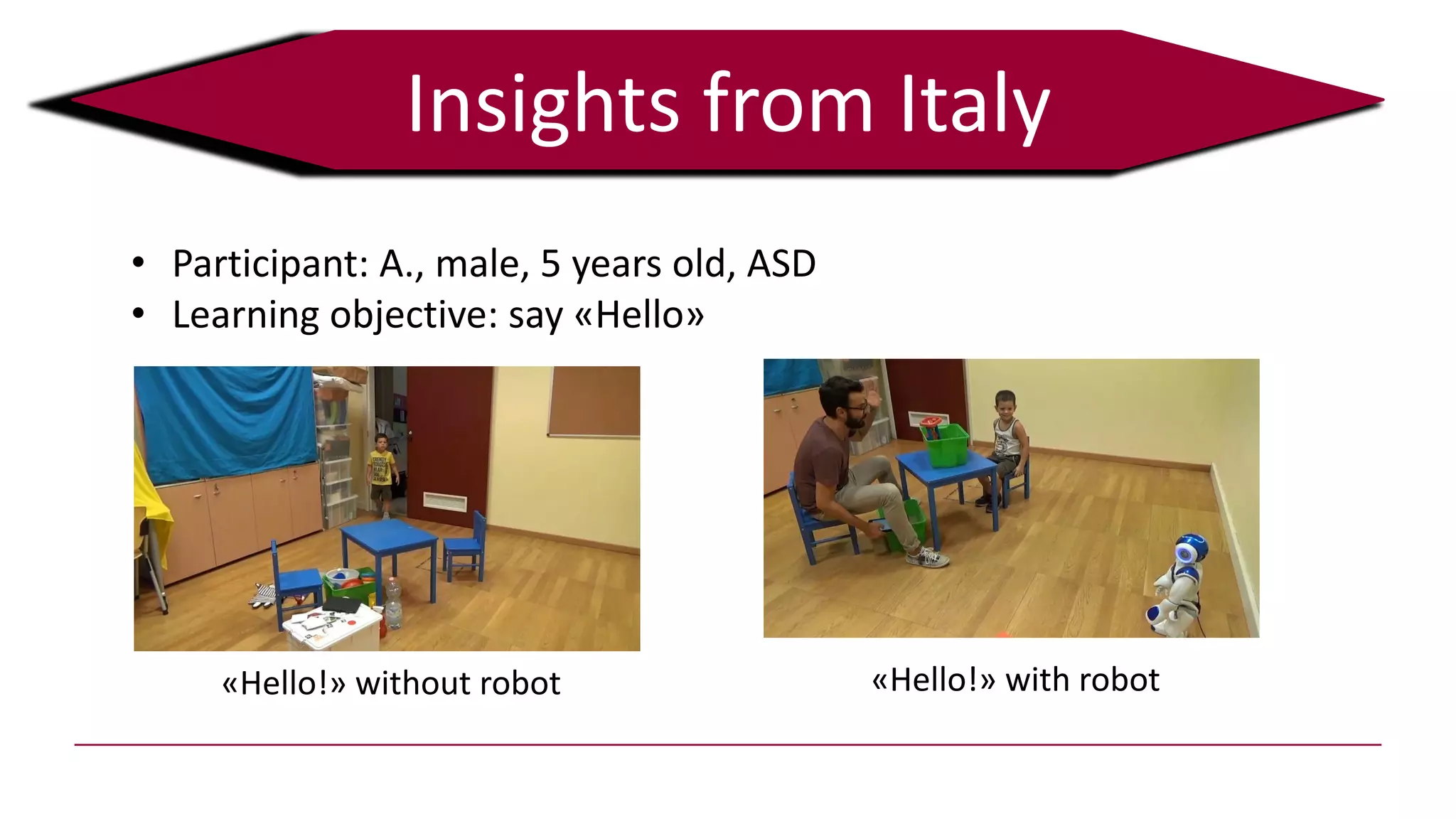
The edurob project, co-funded by the European Union, aims to integrate robotics into special education to enhance learning for students with disabilities through tailored learning scenarios and teacher training. Initial findings indicate that robot-based learning increases engagement and facilitates various educational objectives across multiple domains, such as social learning and problem-solving. Identified barriers include teachers' limited experience with technology and organizational challenges, stressing the need for proper training and resources.