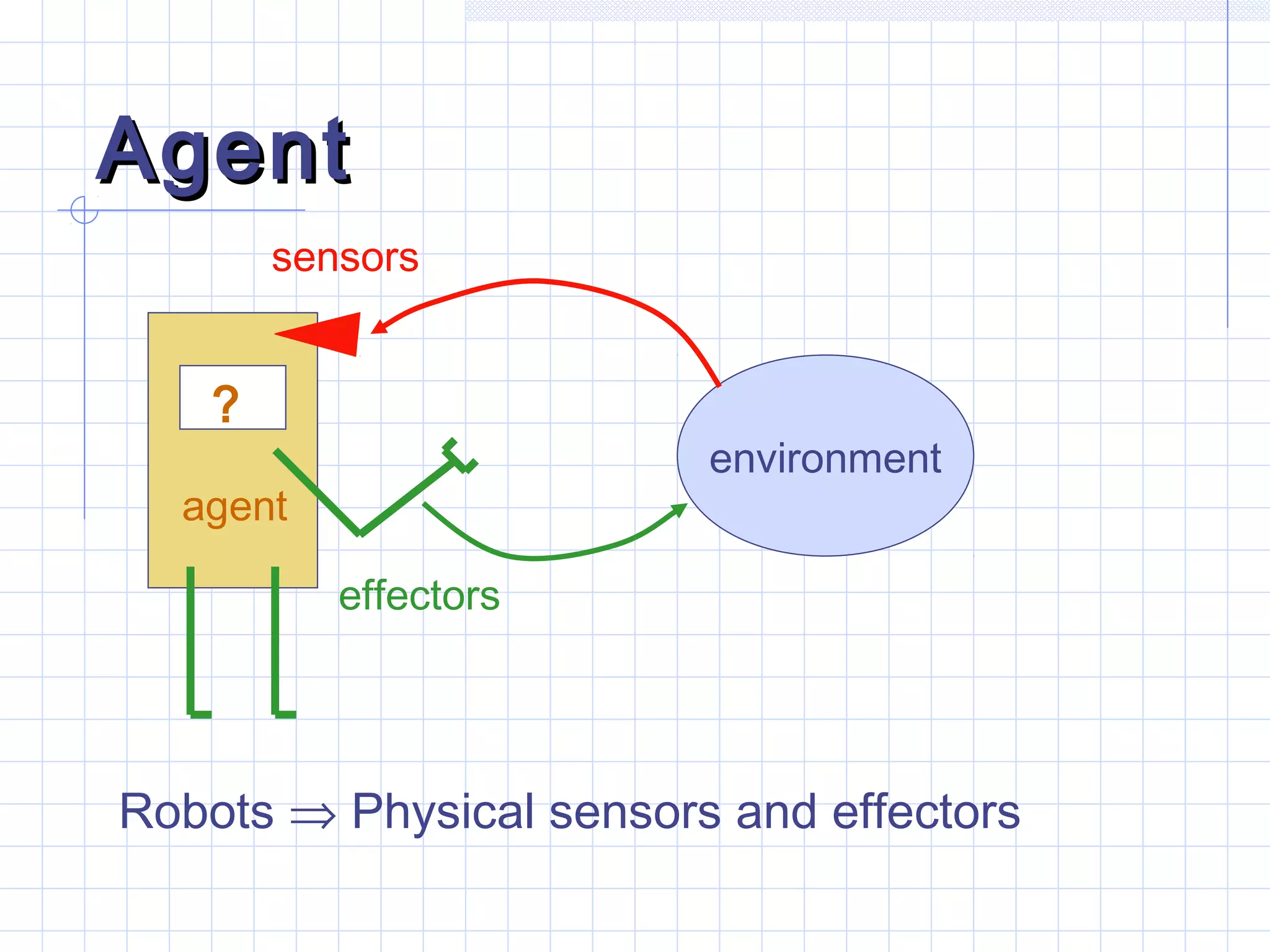
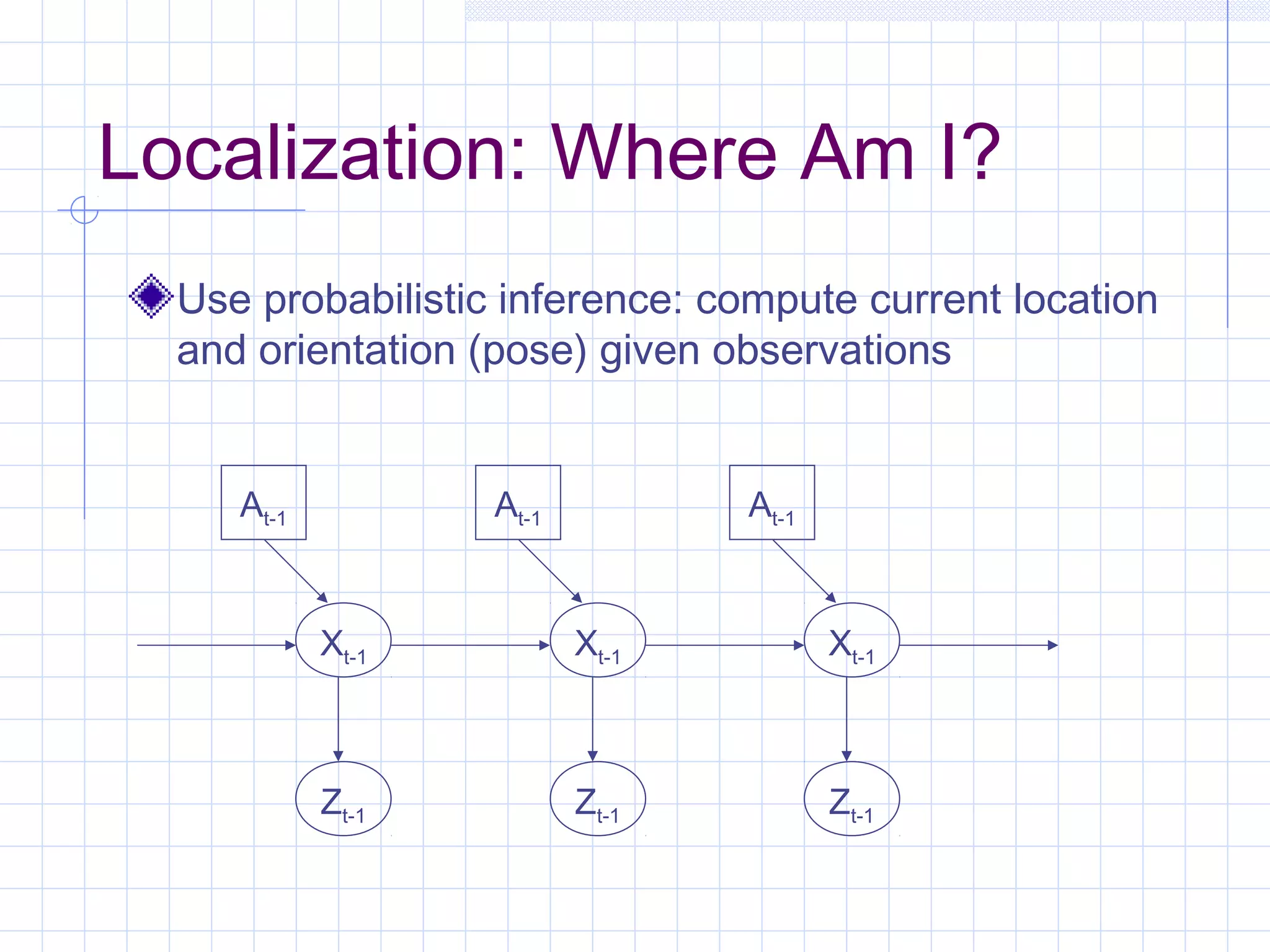
This document provides an introduction to robotics, covering sensors and effectors, types of locomotion and manipulation, and key problems in robotics like localization and motion planning. Sensors allow robots to perceive their environment while effectors enable physical movement. Motion planning aims to find collision-free paths between configurations, and can be approached through grid searches or roadmap methods. Localization determines a robot's pose using probabilistic inference given sensor observations. Robotics presents many challenges around perception, movement, and navigation.