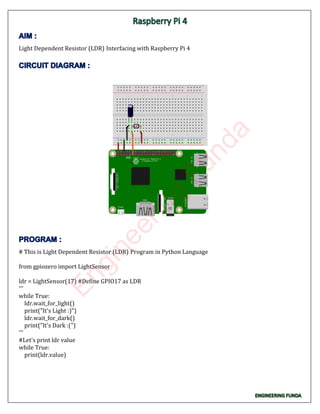
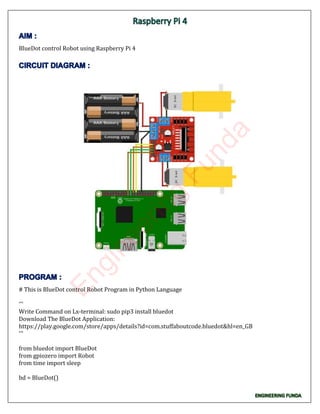
The document discusses programming Python code on a Raspberry Pi 4 to interface with and control various electronic components like LEDs, buttons, buzzers, motors, sensors. It includes code examples to blink an LED, read a button press, make a buzzer sound, control a motor, and use an app to remotely drive a robot built with the Raspberry Pi. The goal is to teach basic electronic interfacing and programming concepts.



























































































![Attack surfaces and attack tress[inform]](https://cdn.slidesharecdn.com/ss_thumbnails/lecture03-260108015941-a4dee53b-thumbnail.jpg?width=640&height=640&fit=bounds)