Downloaded 19 times


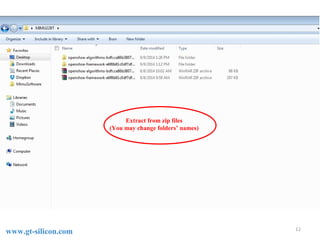
![Save the downloaded zip file in a separate directory
8
www.inertialelements.com
[28Jan2016] We recommend downloading the zip folder from
our website inertialelements.com Support Resources](https://image.slidesharecdn.com/osmiummimu22bt-programmingmanual-1v1-141226103617-conversion-gate01/85/Programming-Osmium-MIMU22BT-Using-AVR-Dragon-8-320.jpg)
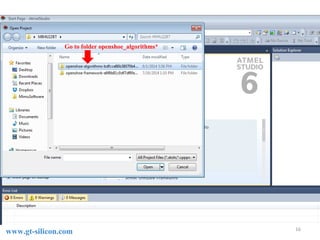
![Save the downloaded zip file in the same
Directory where the earlier one is saved
11
www.inertialelements.com
[28Jan2016] We now recommend downloading the zip folder
from our website inertialelements.com Support Resources](https://image.slidesharecdn.com/osmiummimu22bt-programmingmanual-1v1-141226103617-conversion-gate01/85/Programming-Osmium-MIMU22BT-Using-AVR-Dragon-11-320.jpg)





This document provides detailed instructions for programming the Osmium Mimu22BT/Mimu22BTP devices using Atmel Studio 6.2 and AVR Dragon. It includes hardware and software requirements, a revision history, and step-by-step guidance for setting up the programming environment and executing the firmware update. The document aims to facilitate a user-friendly experience for developers working with these devices.
























































