Download to read offline

![SIMULASI RANGKAIAN
1. Simulasi PID Controller dan Ekuivalen Motor
Rumus 𝑂𝑢𝑡𝑝𝑢𝑡𝑃𝐼𝐷 = 𝐾𝑃[𝐸 + 𝐾𝐼 ∑𝐸∆𝑡 + 𝐾𝐷
∆𝐸
∆𝑡
]](https://image.slidesharecdn.com/2210181051lusianadiyanningrumtugas5-210124124236/75/PID-Control-Dengan-Rangkaian-Ekuivalen-Motor-2-2048.jpg)
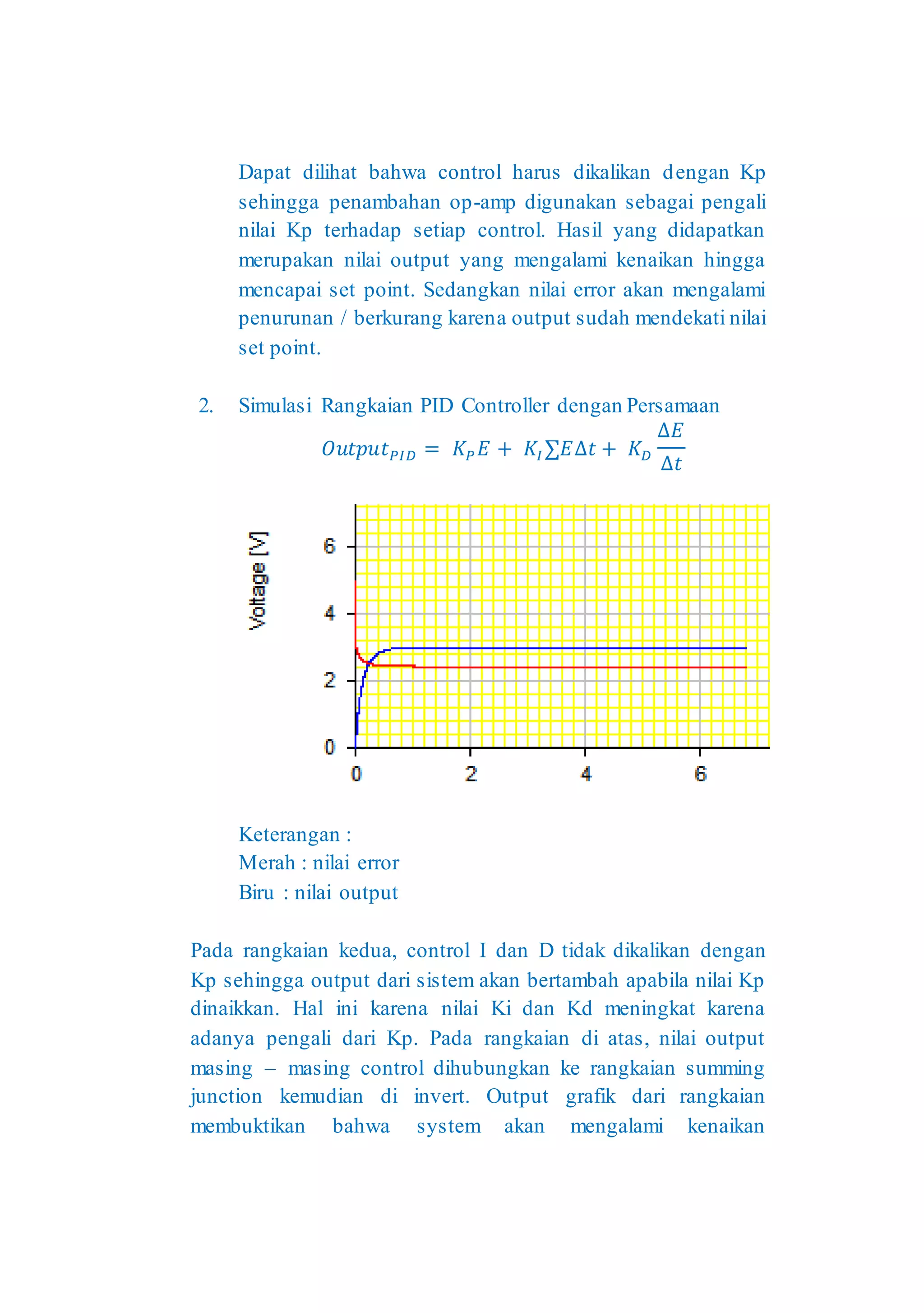
![2. Simulasi Rangkaian PID Controller dengan Persamaan
Rumus 𝑂𝑢𝑡𝑝𝑢𝑡𝑃𝐼𝐷 = 𝐾𝑃𝐸 + 𝐾𝐼 ∑𝐸∆𝑡 + 𝐾𝐷
∆𝐸
∆𝑡
HASIL SIMULASI dan PENJELASAN
1. Simulasi PID Controller dan Ekuivalen Motor
Keterangan :
Merah : nilai error
Biru : nilai output
Berdasarkan rumus berikut :
𝑂𝑢𝑡𝑝𝑢𝑡𝑃𝐼𝐷 = 𝐾𝑃[𝐸 + 𝐾𝐼 ∑𝐸∆𝑡 + 𝐾𝐷
∆𝐸
∆𝑡
]](https://image.slidesharecdn.com/2210181051lusianadiyanningrumtugas5-210124124236/75/PID-Control-Dengan-Rangkaian-Ekuivalen-Motor-3-2048.jpg)


1. The document describes simulations of a PID controller and motor equivalent circuit model. It shows the PID control formula and simulations of a PID controller circuit using that formula. 2. The simulations show the error value in red and output value in blue. The output increases over time to reach the setpoint, while the error decreases. 3. A second simulation is shown using the same PID control formula but with a different circuit. This output also increases to follow the setpoint, while the error decreases as the system approaches the setpoint.