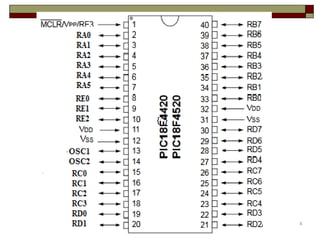
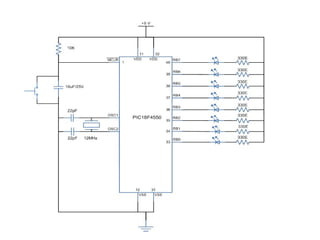
The document provides detailed information on the architecture and programming of PIC microcontrollers, focusing on interfacing with devices like LEDs and LCDs. It covers topics such as I/O port configuration, use of timers, and programming steps, including examples in C language. Key components like the TRIS, LAT, and overwrite registers are explained, alongside practical applications for using timers in controlling various outputs.