Recommended
PDF
PDF
Cake php + php unitによる実践的ユニットテスト
PDF
PDF
PDF
脆弱性もバグ、だからテストしよう PHPカンファンレス2015
PPT
PPTX
PDF
PDF
Getting Started with Testing using PHPUnit
PPT
Eclipse を使った java 開発 111126 杉浦
PDF
Javaで1から10まで書いた話(sanitized)
PDF
PDF
PDF
PDF
JobStreamerではじめるJavaBatchのクラウド分散実行
PPTX
PHP x AWS でスケーラブルなシステムをつくろう
PDF
PDF
第21回関西PHP勉強会 ReactPHPは もっと流行って欲しい #phpkansai
PDF
PPTX
nGrinder3 : だれもが簡単にできる性能テスト
PPTX
PDF
Drupal 8 - モダンなアーキテクチャのPHPベースOSS CMS
PPT
PPT
PPTX
あるあるLT〜サーバーサイドエンジニア〜 Vol.3
KEY
PDF
PDF
PDF
PDF
PHP Codeception テスト -- 日本語
More Related Content
PDF
PDF
Cake php + php unitによる実践的ユニットテスト
PDF
PDF
PDF
脆弱性もバグ、だからテストしよう PHPカンファンレス2015
PPT
PPTX
PDF
What's hot
PDF
Getting Started with Testing using PHPUnit
PPT
Eclipse を使った java 開発 111126 杉浦
PDF
Javaで1から10まで書いた話(sanitized)
PDF
PDF
PDF
PDF
JobStreamerではじめるJavaBatchのクラウド分散実行
PPTX
PHP x AWS でスケーラブルなシステムをつくろう
PDF
PDF
第21回関西PHP勉強会 ReactPHPは もっと流行って欲しい #phpkansai
PDF
PPTX
nGrinder3 : だれもが簡単にできる性能テスト
PPTX
PDF
Drupal 8 - モダンなアーキテクチャのPHPベースOSS CMS
PPT
PPT
PPTX
あるあるLT〜サーバーサイドエンジニア〜 Vol.3
KEY
PDF
PDF
Viewers also liked
PDF
PDF
PHP Codeception テスト -- 日本語
PPTX
KEY
PDF
PDF
Laravel ユーザなら知っておくべきAuthオートログイン
PDF
SECCON CTF セキュリティ競技会コンテスト開催について
PPTX
PDF
ひよこテスト駆動開発(PHPカンファレンス2014)
PDF
PDF
PHPerのための(不遇に負けない)Selenium入門 @ FuelPHP&CodeIgniter ユーザの集い #9
PDF
Yii Framework 2.0 いま求められるRAD標準とは #phpkansai
PDF
アプリのテストを書かなければならないと分かっているけども、書けていない人たちへ
PDF
PPTX
PDF
PDF
PPTX
PPTX
PDF
アジャイル開発とTDDを半年間実践してみた顛末と、これから
Similar to PHPUnit でテスト駆動開発を始めよう
PDF
KEY
KEY
EC-CUBE + PHPUnit で 実践テスト駆動開発
PDF
KEY
JUnit実践入門 xUnitTestPatternsで学ぶユニットテスト
PDF
Code igniterでテスト駆動開発 資料作成中
PPTX
Php development efficiency improvement
PDF
PPT
PDF
Introduction to Continuous Test Runner MakeGood
PDF
PDF
PDF
PDF
Eclipse PDT + MakeGoodによるPHPコードのテスト
PPT
Php unit extensions_selenium2_testcaseによる結合試験でらくらくテスト♪
PDF
PPT
PDF
PDF
ODP
More from Yuya Takeyama
PDF
PDF
Proposal for xSpep BDD Framework for PHP
PDF
PHP と MySQL で 1 カチャカチャカチャ...ッターン! MapReduce (@ニコニコ超会議)
PDF
PDF
Good Parts of PHP and the UNIX Philosophy
PDF
Building Development Environment with php-build and phpenv
ODP
第一回 社内勉強会 PHP Application Security Checklist に学ぶ PHP セキュリティ (Excerpt)
PDF
PDF
PDF
Reactor Pattern and React
PDF
PHP と MySQL でカジュアルに MapReduce する
PDF
PHP と MySQL でカジュアルに MapReduce する (Short Version)
PDF
PDF
PDF
LIMIT 付きで UPDATE を行うと何故怒られるか
Recently uploaded
PDF
PCCC25(設立25年記念PCクラスタシンポジウム):コアマイクロシステムズ株式会社 テーマ 「AI HPC時代のトータルソリューションプロバイダ」
PDF
論文紹介:DiffusionRet: Generative Text-Video Retrieval with Diffusion Model
PDF
論文紹介:HiLoRA: Adaptive Hierarchical LoRA Routing for Training-Free Domain Gene...
PDF
論文紹介:MotionMatcher: Cinematic Motion Customizationof Text-to-Video Diffusion ...
PDF
PCCC25(設立25年記念PCクラスタシンポジウム):日本ヒューレット・パッカード合同会社 テーマ1「大規模AIの能力を最大限に活用するHPE Comp...
PDF
PCCC25(設立25年記念PCクラスタシンポジウム):Pacific Teck Japan テーマ3「『TrinityX』 AI時代のクラスターマネジメ...
PDF
PCCC25(設立25年記念PCクラスタシンポジウム):Pacific Teck Japan テーマ2「『Slinky』 SlurmとクラウドのKuber...
PDF
PCCC25(設立25年記念PCクラスタシンポジウム):エヌビディア合同会社 テーマ1「NVIDIA 最新発表製品等のご案内」
PDF
PCCC25(設立25年記念PCクラスタシンポジウム):日本ヒューレット・パッカード合同会社 テーマ3「IT運用とデータサイエンティストを強力に支援するH...
PDF
PCCC25(設立25年記念PCクラスタシンポジウム):富士通株式会社 テーマ1「HPC&AI: Accelerating material develo...
PPTX
ChatGPTのコネクタ開発から学ぶ、外部サービスをつなぐMCPサーバーの仕組み
PPTX
2025年11月24日情報ネットワーク法学会大井哲也発表「API利用のシステム情報」
PDF
AI開発の最前線を変えるニューラルネットワークプロセッサと、未来社会における応用可能性
PDF
ニューラルプロセッサによるAI処理の高速化と、未知の可能性を切り拓く未来の人工知能
PDF
膨大なデータ時代を制する鍵、セグメンテーションAIが切り拓く解析精度と効率の革新
PHPUnit でテスト駆動開発を始めよう 1. 2. 3. 4. 5. 6. 7. 8. 9. class CalculatorTest
extends PHPUnit_Framework_TestCase
{
public function setUp()
{
$this->calc = new Calculator;
}
public function test_add_引数の和を返す()
{
$result = $this->calc->add(1, 2);
$this->assertSame(3, $result);
}
}
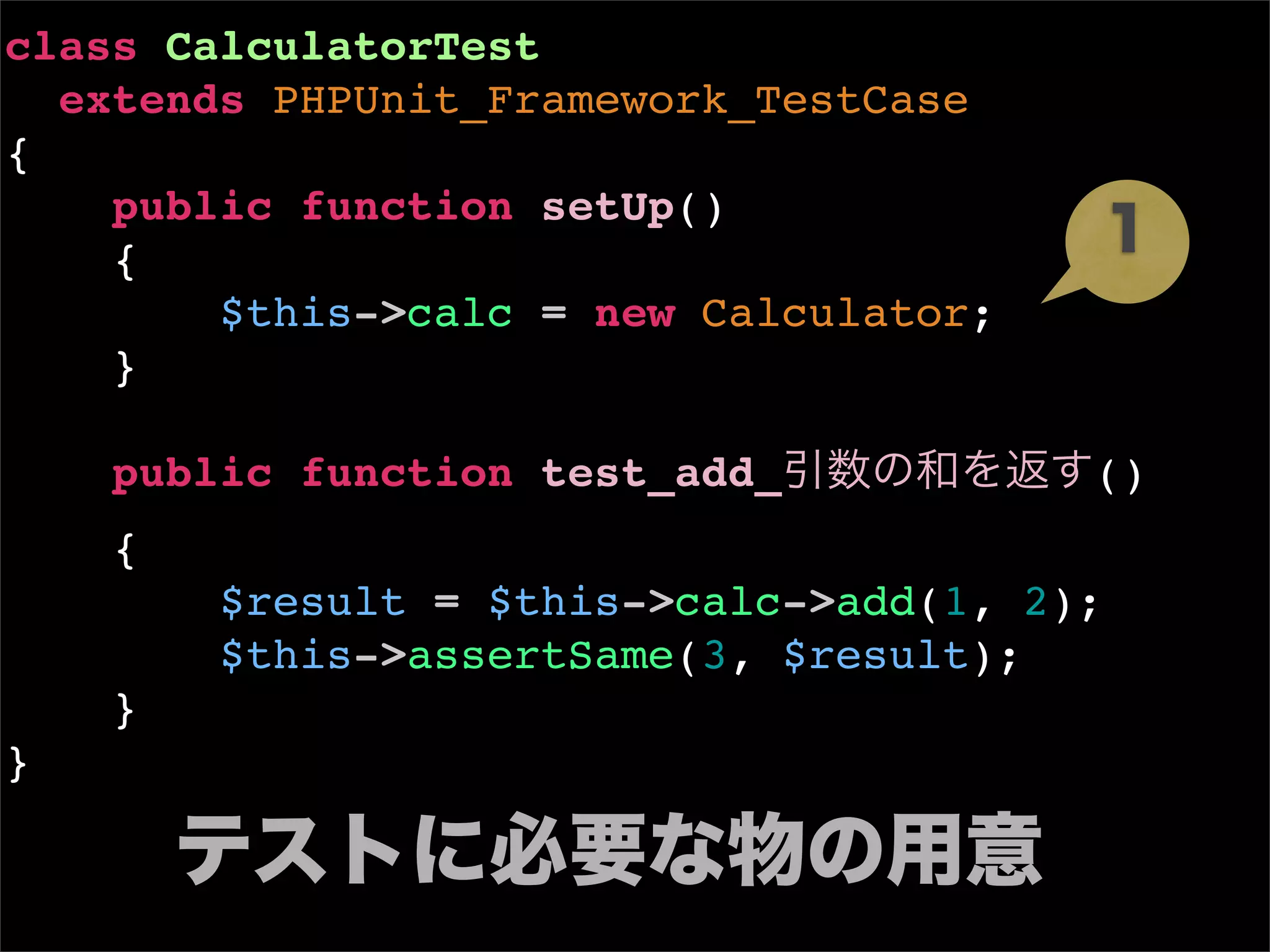
10. class CalculatorTest
extends PHPUnit_Framework_TestCase
{
public function setUp()
{ 1
$this->calc = new Calculator;
}
public function test_add_引数の和を返す()
{
$result = $this->calc->add(1, 2);
$this->assertSame(3, $result);
}
}
テストに必要な物の用意
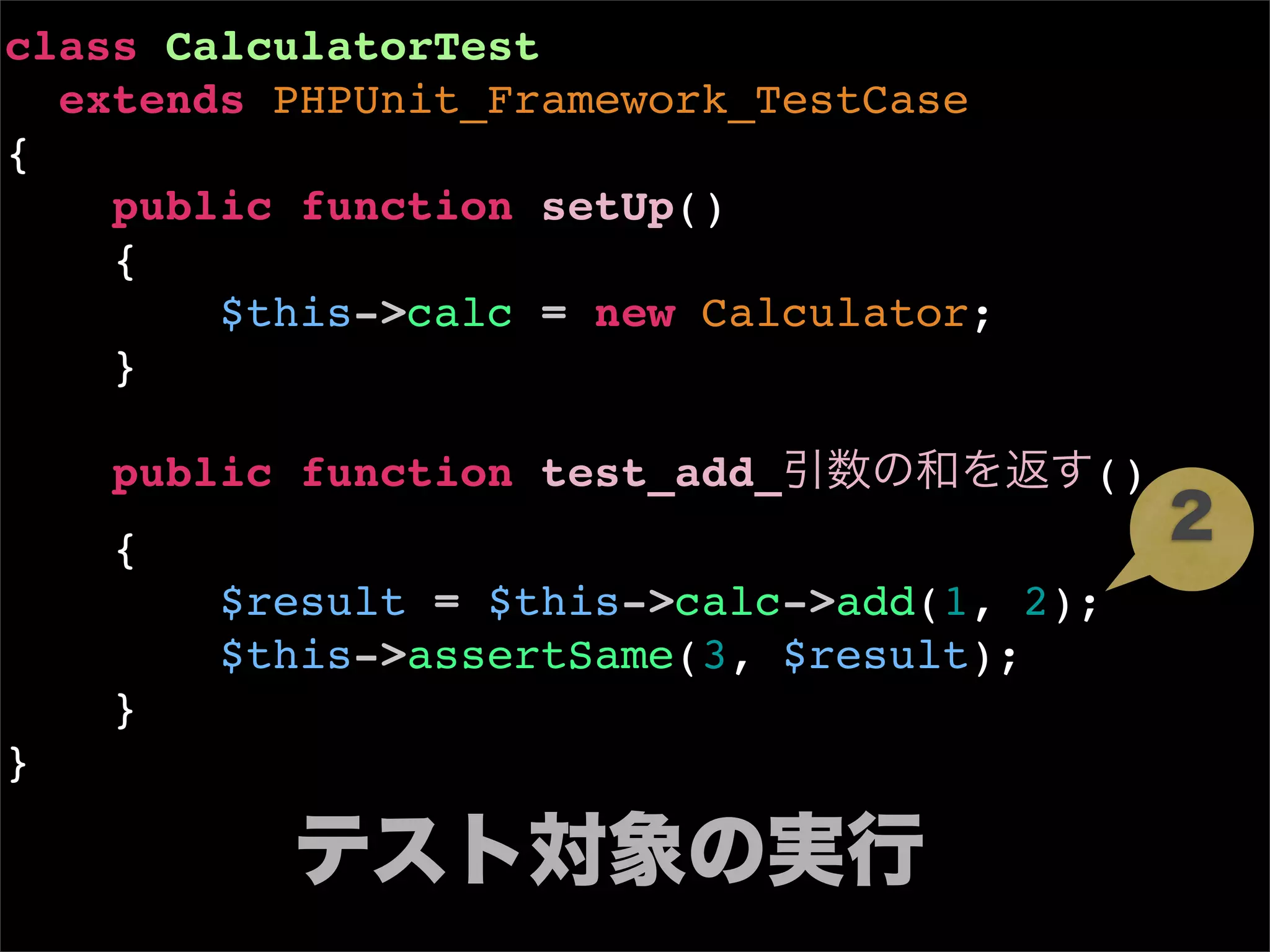
11. class CalculatorTest
extends PHPUnit_Framework_TestCase
{
public function setUp()
{
$this->calc = new Calculator;
}
public function test_add_引数の和を返す()
{
2
$result = $this->calc->add(1, 2);
$this->assertSame(3, $result);
}
}
テスト対象の実行
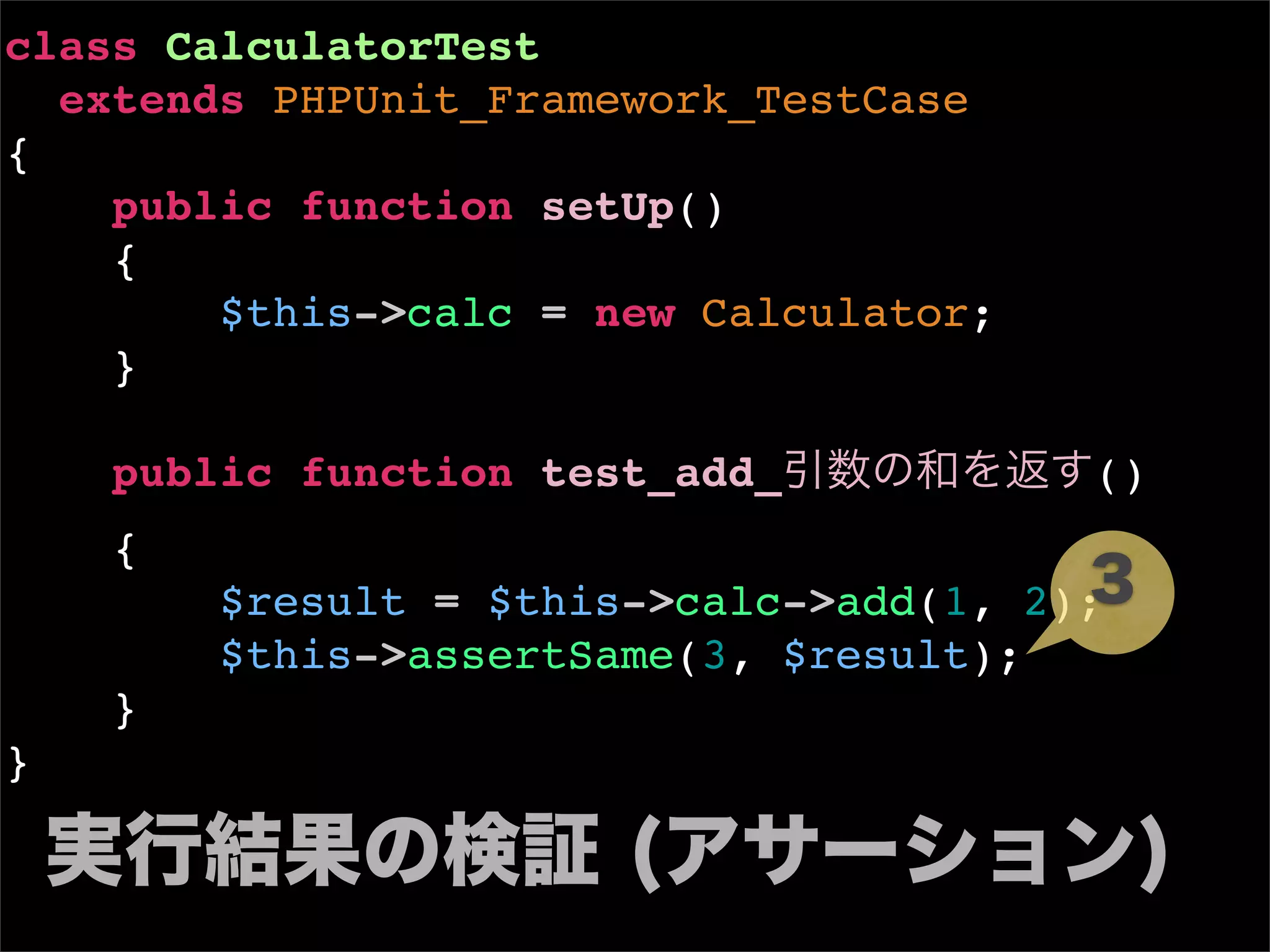
12. class CalculatorTest
extends PHPUnit_Framework_TestCase
{
public function setUp()
{
$this->calc = new Calculator;
}
public function test_add_引数の和を返す()
{
3
$result = $this->calc->add(1, 2);
$this->assertSame(3, $result);
}
}
実行結果の検証 (アサーション)
15. 16. 17. 18. 19. 20. 21. 22. 23. 24. 25. 26. 27. 28. 29. 30. 31. 32. 33. 34. 35. 36. 37. 38. 39. 40. 41. 42. 43. 44. 45. オレが全部(ry
本当に
•酷いレガシーコードの塊
• それで
こんなの読んでられない!!
•全部書き直した方が早いので
いいのか?
は???
46. 47. 48. 49. 50. 51. 52. 53. 54. 55. 56. 57. 58.

















































































![Making DSL with []](https://cdn.slidesharecdn.com/ss_thumbnails/making-dsl-with-110909153010-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)















