PDS Imaging Node's Hosted Machine Learning Platform
•
0 likes•48 views

Imaging Node is looking to expand its machine learning efforts to involve more researchers from within and without the PDS in the form of a machine learning cloud platform. We are looking for use cases from the machine learning community, and whether such a product would be of use to them.

Recommended
More Related Content
What's hot
What's hot (10)
Similar to PDS Imaging Node's Hosted Machine Learning Platform
Similar to PDS Imaging Node's Hosted Machine Learning Platform (20)
Recently uploaded
Recently uploaded (20)
PDS Imaging Node's Hosted Machine Learning Platform
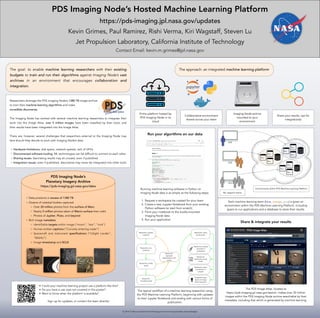
- 1. PDS Imaging Node’s Hosted Machine Learning Platform https://pds-imaging.jpl.nasa.gov/updates Kevin Grimes, Paul Ramirez, Rishi Verma, Kiri Wagstaff, Steven Lu Jet Propulsion Laboratory, California Institute of Technology Contact Email: kevin.m.grimes@jpl.nasa.gov ◦ Data products in excess of 1380 TB ◦ Dozens of celestial bodies captured ◦ Over 20 million photos from the surface of Mars ◦ Nearly 5 million photos taken of Mars’s surface from orbit ◦ Photos of Jupiter, Pluto, and beyond ◦ Rich image metadata ◦ Identifiable targets within image (“moon”, “star”, “rock”) ◦ Human-written captions (“Curiosity entering crater”) ◦ Spacecraft and instrument specifications (“InSight Lander”, “MAHLI”) ◦ Image timestamp and SCLK PDS Imaging Node’s Planetary Imagery Archive https://pds-imaging.jpl.nasa.gov/data Running machine learning software in Python on Imaging Node data is as simple as the following steps: 1. Request a workspace be created for your team 2. Create a new Jupyter Notebook from your existing Python software (or start from scratch) 3. Point your notebook to the locally-mounted Imaging Node data 4. Run your application Run your algorithms on our data The approach: an integrated machine learning platform Entire platform hosted by PDS Imaging Node in its cloud Imaging Node archive mounted to your environment Collaborative environment shared across your team Share your results, opt for integration(s) The goal: to enable machine learning researchers with their existing budgets to train and run their algorithms against Imaging Node’s vast archives in an environment that encourages collaboration and integration. Share & integrate your results The PDS Image Atlas, located at https://pds-imaging.jpl.nasa.gov/search, makes over 30 million images within the PDS Imaging Node archive searchable by their metadata, including that which is generated by machine learning. ML research teams Environments within PDS Machine Learning Platform Each machine learning team (blue, orange, gray) is given an environment within the PDS Machine Learning Platform, including space to run applications and a database to store their results. 2019 California Institute of Technology. Government sponsorship acknowledged. The typical workflow of a machine learning researcher using the PDS Machine Learning Platform, beginning with updates to their Jupyter Notebook and ending with various forms of publication. Researcher updates notebook Researcher runs notebook Researcher verifies results Researcher makes results public Researcher visualizes results Researcher expresses dissatisfaction with results Researcher embeds permalink in publication Researcher downloads results locally Researcher posts visualization to LinkedIn Researcher opts results for Image Atlas integration • Could your machine learning project use a platform like this? • Do you have a use case not covered in this poster? • Want to know when the platform is available? Sign up for updates, or contact the team directly! Researchers leverage the PDS Imaging Node’s 1380 TB image archive to train their machine learning algorithms and make incredible discoveries. The Imaging Node has worked with several machine learning researchers to integrate their work into the Image Atlas: over 5 million images have been classified by their tools, and their results have been integrated into the Image Atlas. There are, however, several challenges that researchers external to the Imaging Node may face should they decide to work with Imaging Node’s data: ◦ Hardware limitations: disk space, network speeds, lack of GPUs ◦ Disconnected software tooling: ML technologies can be difficult to connect to each other ◦ Sharing issues: fascinating results may sit unused, even if published ◦ Integration issues: even if published, discoveries may never be integrated into other tools