This document discusses analysis methods for structures, including force methods and displacement methods. The force method involves choosing releases to address structural indeterminacy and applying equilibrium equations. The displacement method involves determining degrees of freedom based on assumptions about member inextensibility and applying compatibility equations. Iterative techniques like moment distribution and Kani's method can be used for numerical solutions. Assumptions around member behavior and structural constraints impact the analysis method and results.
![Comparison
Force Method
• Preliminaries: Choose
proper releases equal to n.
for Given Loading find
(draw) mo, and mi]i=1,..,n
• Sequential Steps:
1. Equilibrium, Pm = [B0 B] [Pj Q]T
2. Generalized stress-strain relation
ship, and
3. Compatibility.
[Dj U]T [Pj Q]T
Displacement Method
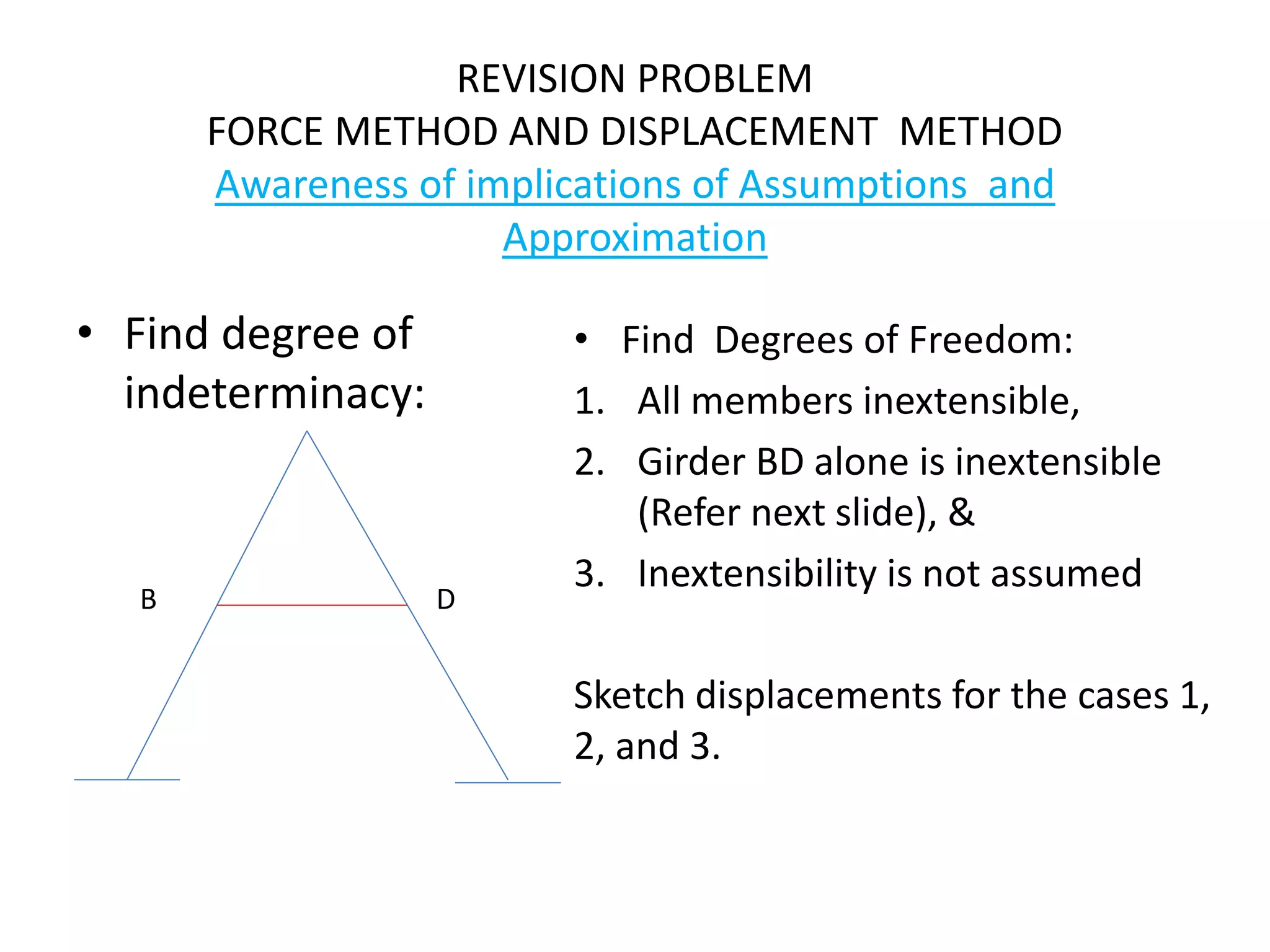
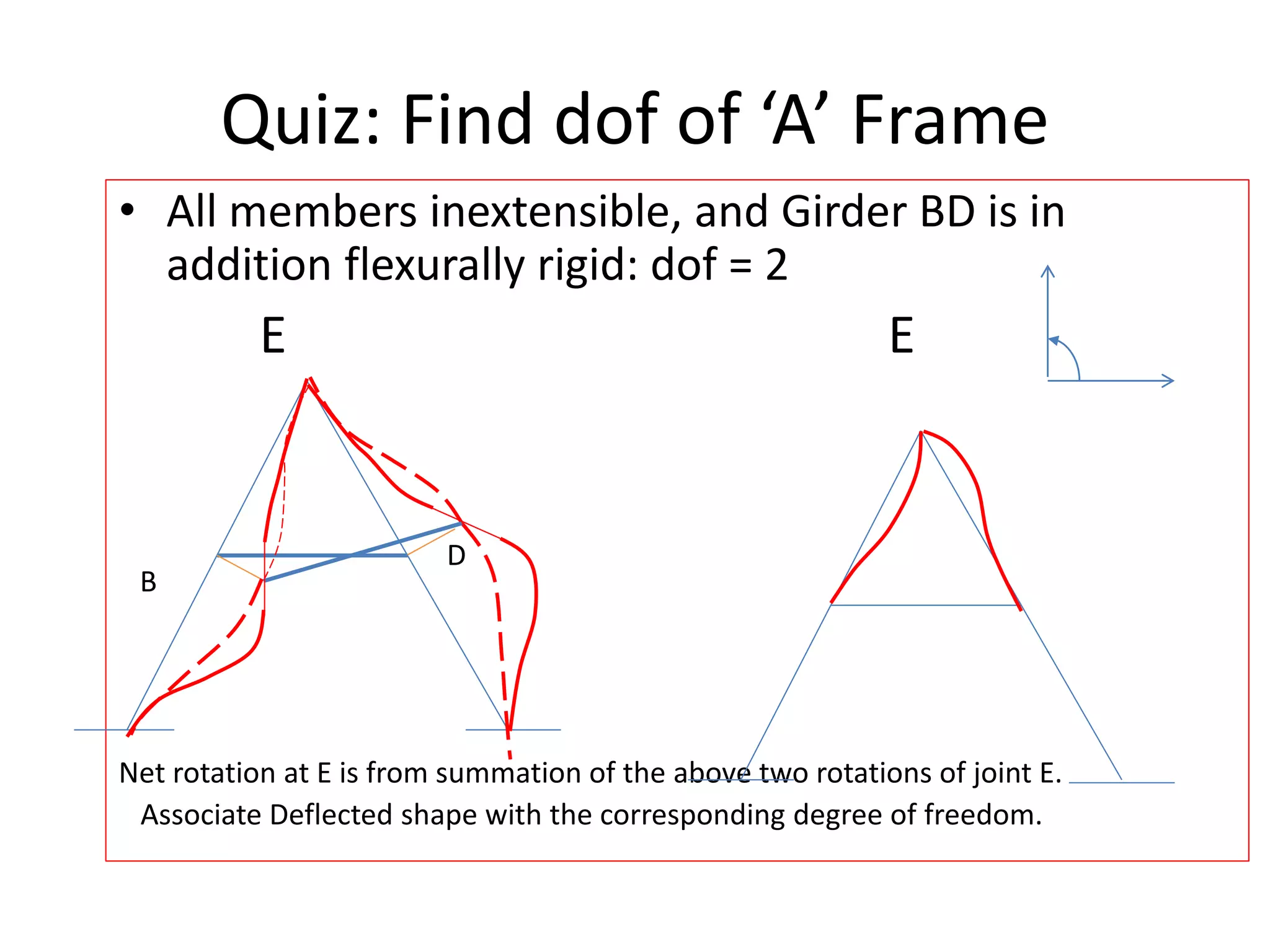
• Choose nodes. Determine
Degrees of Freedom based
on inextensibilities. Find
Nodal Loads for Given
Loading
• Sequential Steps:
1. Compatibility, dm = A dj
2. Generalized stress-strain relation
ship, and
3. Equilibrium.
Pj = {[A]T Km [A]} dj
•
F](https://image.slidesharecdn.com/partiionline-1-191207094410/75/Sr-lectures-part-2-6-2048.jpg)