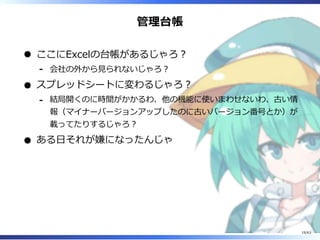
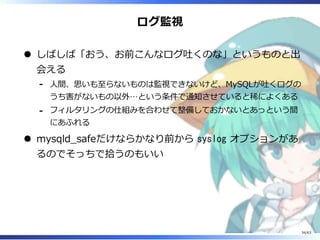
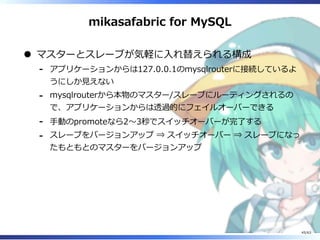
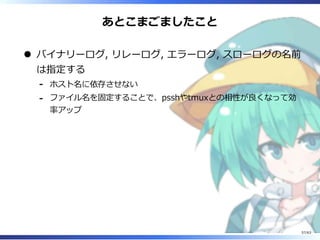
ログ監視
[Note] Slave: receivedend packet from server due to
dump thread being killed on master
server̲uuidカブりとかで出るやつ(I/Oスレッドが無限に再起動する
やつ)
-
mysqld_safe Number of processes running now: 0
OOM Killerに亭主を殺されたり、SEGVでmysqldが死んだりした時は
まずこれが出る。mysqld̲safeを使ってると瞬間的に再起動されち
ゃってNagiosに引っかからないことがあるので。
-
[Warning] Unsafe statement written to the binary log
using statement format since BINLOG_FORMAT =
STATEMENT.
binlog_format = STATEMENT でレプリケーションアンセーフな関数使
っちゃった時に
-
今はもう binlog_format = STATEMENT 撲滅したので⼆度と出ることは
ないような気もする
-
32/63
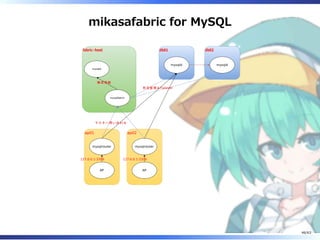
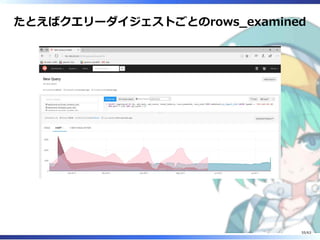
後追いできるリソース監視
あと SHOW GLOBALSTATUS, SHOW GRANTS, SHOW VARIABLES,
SHOW TABLE STATUS とか
p_s.events_statements_summary_by_digest とか取って保管
してみるとかしてる
普段はただデータを保管(MySQLに突っ込んでる)するだ
けで、⾒たくなったら re:dashのコンテナー起動してSQL叩
いてグラフにする
拡張がすごく楽(SELECTで値を取ってINSERTするだけだ
から)
実際に⾒たくなった時に「どう⾒るか」を考える-
54/63







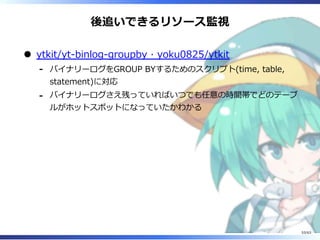
![ログ監視
[Note] Slave: received end packet from server due to
dump thread being killed on master
server̲uuidカブりとかで出るやつ(I/Oスレッドが無限に再起動する
やつ)
-
mysqld_safe Number of processes running now: 0
OOM Killerに亭主を殺されたり、SEGVでmysqldが死んだりした時は
まずこれが出る。mysqld̲safeを使ってると瞬間的に再起動されち
ゃってNagiosに引っかからないことがあるので。
-
[Warning] Unsafe statement written to the binary log
using statement format since BINLOG_FORMAT =
STATEMENT.
binlog_format = STATEMENT でレプリケーションアンセーフな関数使
っちゃった時に
-
今はもう binlog_format = STATEMENT 撲滅したので⼆度と出ることは
ないような気もする
-
32/63](https://image.slidesharecdn.com/technologyforsupport300mysqlds-170905070356/85/MySQL-300-33-320.jpg)
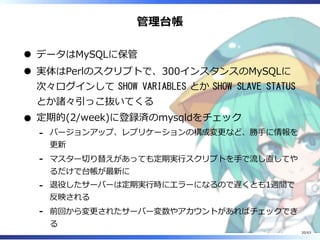
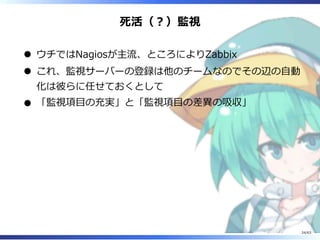
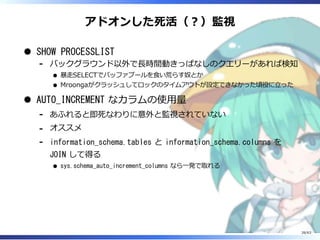
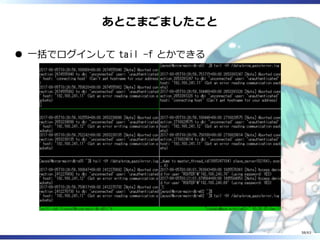
![コンフィグテンプレートエンジン
<?php
$opt= getopt("", array("datadir:", "basedir:", "tmpdir:", "slave
", "port:"));
$ipaddr= getHostByName(getHostName());
$server_id= ip2long($ipaddr) & 65535;
$memsize_kb= exec("head -1 /proc/meminfo | awk '{print $2}'");
?>
[mysqld]
..
server-id= <?=$server_id?>
<?= isset($opt["slave"]) ? "read_only" : ""?>
report-host= <?=gethostname()?>
innodb_buffer_pool_size= <?=(int) ($memsize_kb * 0.6)?>K
innodb_log_file_size= <?=(int) ($memsize_kb * 0.6 * 0.2)?>K
..
36/63](https://image.slidesharecdn.com/technologyforsupport300mysqlds-170905070356/85/MySQL-300-37-320.jpg)
![コンフィグテンプレートエンジン
report-host
[mysql] セクションの prompt
server-id
各種ファイル名のパスとか
やろうやろうと思っていたメモリー関連のサイジングもそろ
そろ⼿を付けたい
38/63](https://image.slidesharecdn.com/technologyforsupport300mysqlds-170905070356/85/MySQL-300-39-320.jpg)



















![[Aurora事例祭り]Amazon Aurora を使いこなすためのベストプラクティス](https://cdn.slidesharecdn.com/ss_thumbnails/amazonauroratips-170307140000-thumbnail.jpg?width=640&height=640&fit=bounds)



















































