Downloaded 23 times

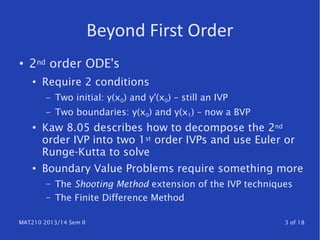
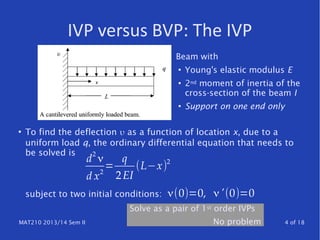
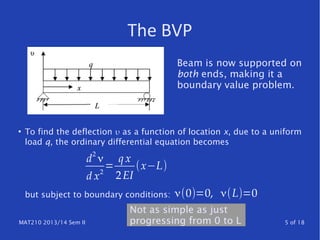
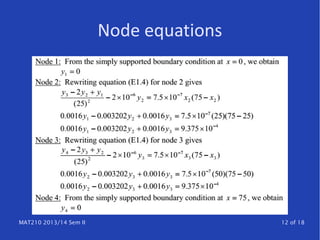
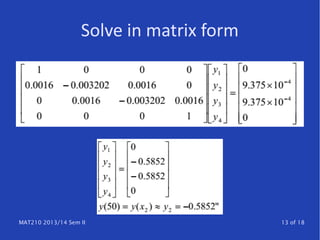
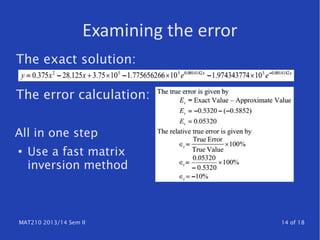
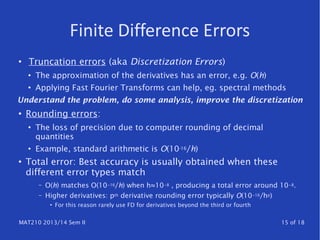
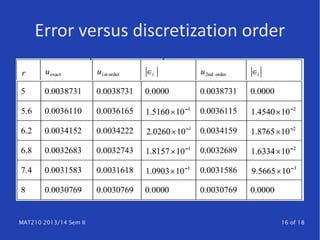
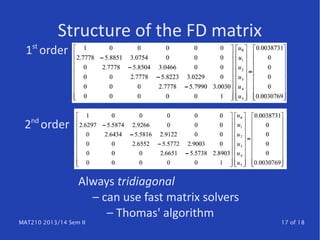

The document discusses techniques for solving differential equations, particularly focusing on boundary value problems (BVPs) using methods like the shooting method and finite difference methods. It details how to transition from initial value problems (IVPs) to BVPs and provides insights into algorithmic approaches for these techniques. Additionally, it highlights error analysis and the structure of finite difference matrices.