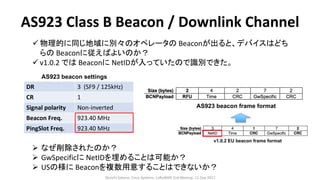
AS923 Class B Beacon / Downlink Channel
DR 3 (SF9 / 125kHz)
CR 1
Signal polarity Non-inverted
Beacon Freq. 923.40 MHz
PingSlot Freq. 923.40 MHz
AS923 beacon settings
ü 物理的に同じ地域に別々のオペレータの Beaconが出ると、デバイスはどち
らの Beaconに従えばよいのか?
ü v1.0.2 では Beaconに NetIDが入っていたので識別できた。
AS923 beacon frame format
Ø なぜ削除されたのか?
Ø GwSpecificに NetIDを埋めることは可能か?
Ø USの様に Beaconを複数用意することはできないか?
v1.0.2 EU beacon frame format
Shoichi Sakane, Cisco Systems, LoRaWAN 2nd Meetup, 11-Sep-2017
18.
AS923 制御チャネル
LoRaWAN 国別仕様では、日本は AS923の一部として、920-928 MHz(24〜61ch)が定義されている。
ü default channels must be implemented in every end-device and cannot be modified through
the NewChannelReq command and guarantee a minimal common channel set between end-
devices and network gateways. (2.7.2)
ü the list of frequencies that should be used by end-devices to broadcast the JoinReq message.
(2.7.2)
ü The RX2 receive window uses a fixed frequency and data rate. The default parameters are
923.2 MHz / DR2 (SF10/125KHz). (2.7.7)
ü The beacons SHALL be transmitted using the following settings. (2.7.8)
923.2 923.4
Default CH x x
Join Request x x
Class A RX2 x
Class B Beacon x
Class B PingSlot x
Class C RX2 x
Shoichi Sakane, Cisco Systems, LoRaWAN 2nd Meetup, 11-Sep-2017
19.
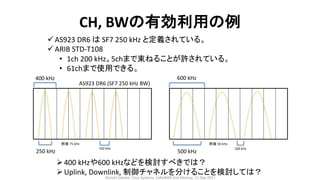
AS923制御チャネルと ARIB STD-T108
ü AS923 では、37, 38ch に制御メッセージを集中させている。
ü37,38を制御メッセージで変える事は可能。923.2 923.4
Default CH x x
Join Request x x
Class A RX2 x
Class B Beacon x
Class B PingSlot x
Class C RX2 x
特小T3-8、簡易 T3-8 から抜粋。ただし、2ch以上の同時使用と、Sending duration 6ms は除外。
Ø チャネル使用率が高いとメッセージの到達制が不安定になる事が考えられる。
Ø Class B Beaconの到達制は Class Bの運用に直接影響がでるので、安定させる必要がある。
Ø Class C RX2 が定常的に使われると、制御メッセージを含め通信が不安定になる。特に
250mWからの影響が大きいと思われる。
Ø 20mWの通信は 39ch以上を使うのが望ましいのでは?
Ø Class B Beaconは 37,38以外のチャネルを複数割りあてるのが望ましいのでは?
Ø Class C RX2 は固有チャネルを複数割り当てるのが望ましいのでは?
Shoichi Sakane, Cisco Systems, LoRaWAN 2nd Meetup, 11-Sep-2017


![LoRaWAN 1.1 Regional Parameters
AS923 #of CH 2
Freq. 923.20, 923.40
BW (kHz) 125
DR 0~5
Duty Cycle < 1%
Join Request DR2
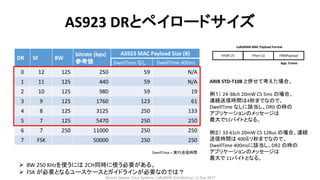
DR Uplink MAC Payload Size (B) Downlink MAC Payload Size (B)
DwellTime = 0 DwellTime = 1 DwellTime = 0 DwellTime = 1
0 59 N/A 59 N/A
1 59 N/A 59 N/A
2 59 19 59 19
3 123 61 123 61
4 230 134 230 134
5 230 250 230 250
6 230 250 230 250
7 230 250 230 250
8:15 RFU RFU
DR 3 (SF9 / 125kHz)
CR 1
Signal polarity Non-inverted
frequency 923.40MHz
AS923 beacon settings
AS923 maximum payload size (not repeater compatible)
1. Brunei [923-925 MHz]
2. Cambodia [923-925 MHz]
3. Indonesia [923-925 MHz]
4. Japan [920-928 MHz]
5. Laos [923-925 MHz]
6. New Zealand [915-928 MHz]
7. Singapore [920-925 MHz]
8. Taiwan [922-928 MHz]
9. Thailand [920-925 MHz]
10. Vietnam [920-925 MHz]
※ Hong Kong was removed during ver1.0 to ver1.1.
AS923 default channels / JoinReq.
DR SF BW Indicative bit
rate (bps)
0 12 125 250
1 11 125 440
2 10 125 980
3 9 125 1760
4 8 125 3125
5 7 125 5470
6 7 250 11000
AS923 LoRa Data rate
TXPow. EIRP
0 Max EIRP
1 Max EIRP – 2dB
2 Max EIRP – 4dB
3 Max EIRP – 6dB
4 Max EIRP – 8dB
5 Max EIRP – 10dB
6 Max EIRP – 12dB
7 Max EIRP – 14dB
AS923 TXPower
(DRAFT Rev.A as of July-2016)
アジアの周波数帯の近い国をまとめて最大公約数で仕様を決めたと思われる。Shoichi Sakane, Cisco Systems, LoRaWAN 2nd Meetup, 11-Sep-2017](https://image.slidesharecdn.com/lorawan-2nd-meetup-ssakane-20170911-fix-170911072619/85/LoRaWAN-AS923-ARIB-STD-T108-4-320.jpg)


![AS923 Default Channels
ü デバイスがサポートしなければならないパラメータ [must be implemented]
• BW: 125 kHz
• CH: 923.20 MHz, 923.40 MHz
• DR: 0 to 5
• Duty Cycle: < 1%
• Default EIRP: 16 dBm [should use]
• CH数: 16 [should]
• TxParamSetupReq/Ans [MUST be implemented]
ü 全ての GWは、このチャネルを受信すべき [should be listening on]
ü この CHは NewChannelReq で変更できない。[cannot be modified]
ü デバイスが JoinReq で使用するパラメータ [should be used]
ü 実行送信時間は 400ms から TxParamSetupReq で指定される値まで保証する [are compatible with]
Ø ARIB STD-T108では、特小 13 dBm。簡易 24 dBm となっている。
Ø MACコマンドを使う前にコンソールなどから設定する必要がある。
Shoichi Sakane, Cisco Systems, LoRaWAN 2nd Meetup, 11-Sep-2017](https://image.slidesharecdn.com/lorawan-2nd-meetup-ssakane-20170911-fix-170911072619/85/LoRaWAN-AS923-ARIB-STD-T108-7-320.jpg)