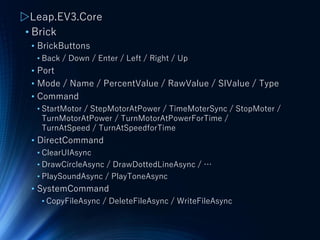
New API
Userinterface
Fundamentals
Devices GraphicsandmediaCommunicationsanddata Services
Geo-
location
Proximity
Direct3D Direct2D
Direct
Write
PlayTo
Contracts
Bing
Azure
Mobile
HTML5/CSS XAMLInput Controls
Authentication
Bluetooth
USB
HID WiFi direct
Point of
service
3D
printing
Scanning
WebGL
HTTP
Contacts
Appoint-
ments
PDF
Speech
synthesis
Diagnostics
Portable
Sensors Playback Capture
Printing
SVGCanvas
Local
storage
SMS
Streams
Backgroun
dtransfer
Syndicatio
n
Networkin
g
XML and
JSON
Skydrive
Live tiles and
toast
Accessibility Databinding
Application
services
Threading
timers
Memory
management
Globalization Cryptography
Xbox Live
NEW








![コマンド送信
Byte[] mergedData = new Byte[header.Length + data.Length];
Array.Copy(header, mergedData, header.Length);
Array.Copy(data, 0, mergedData, header.Length, data.Length);
this.BTWriter.WriteBytes(mergedData);
var sendResult = await this.BTWriter.StoreAsync();](https://image.slidesharecdn.com/20140315hatsune-140318105752-phpapp02/85/LEGO-MINDSTORMS-EV3-API-17-320.jpg)
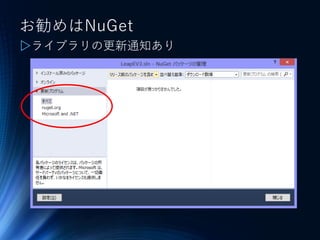
![コマンド送信
Byte[] mergedData = new Byte[header.Length + data.Length];
Array.Copy(header, mergedData, header.Length);
Array.Copy(data, 0, mergedData, header.Length, data.Length);
this.BTWriter.WriteBytes(mergedData);
var sendResult = await this.BTWriter.StoreAsync();
headerの形式は?](https://image.slidesharecdn.com/20140315hatsune-140318105752-phpapp02/85/LEGO-MINDSTORMS-EV3-API-18-320.jpg)
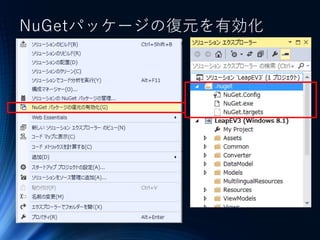
![コマンド送信
Byte[] mergedData = new Byte[header.Length + data.Length];
Array.Copy(header, mergedData, header.Length);
Array.Copy(data, 0, mergedData, header.Length, data.Length);
this.BTWriter.WriteBytes(mergedData);
var sendResult = await this.BTWriter.StoreAsync();
headerの形式は?
dataの形式は?](https://image.slidesharecdn.com/20140315hatsune-140318105752-phpapp02/85/LEGO-MINDSTORMS-EV3-API-19-320.jpg)
![コマンド送信
Byte[] mergedData = new Byte[header.Length + data.Length];
Array.Copy(header, mergedData, header.Length);
Array.Copy(data, 0, mergedData, header.Length, data.Length);
this.BTWriter.WriteBytes(mergedData);
var sendResult = await this.BTWriter.StoreAsync();
headerの形式は?
dataの形式は?
センサーからの受信は?](https://image.slidesharecdn.com/20140315hatsune-140318105752-phpapp02/85/LEGO-MINDSTORMS-EV3-API-20-320.jpg)





![コマンド送信
Byte[] mergedData = new Byte[header.Length + data.Length];
Array.Copy(header, mergedData, header.Length);
Array.Copy(data, 0, mergedData, header.Length, data.Length);
this.BTWriter.WriteBytes(mergedData);
var sendResult = await this.BTWriter.StoreAsync();](https://image.slidesharecdn.com/20140315hatsune-140318105752-phpapp02/85/LEGO-MINDSTORMS-EV3-API-35-320.jpg)
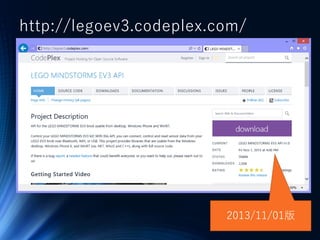
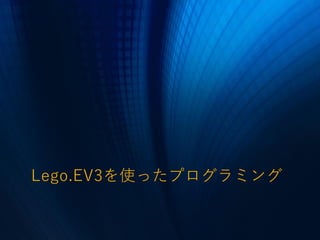
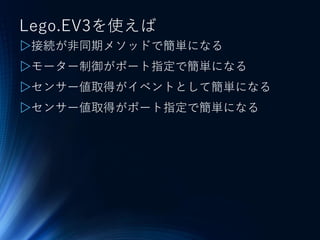
![データ受信- Lego.EV3
private void Connecter_BrickChanged(
object sender,
Lego.Ev3.Core.BrickChangedEventArgs e)
{
If (e.Ports[Lego.Ev3.Core.InputPort.One].Type != Lego.Ev3.Core.DeviceType.Empty)
{
this.SenserConnecters(index).Value =
e.Ports[Lego.Ev3.Core.InputPort.One].SIValue;
}
}
▷EV3からのデータ受信イベントで
▷1番ポートからのデータが存在すれば
▷その値を取得する](https://image.slidesharecdn.com/20140315hatsune-140318105752-phpapp02/85/LEGO-MINDSTORMS-EV3-API-37-320.jpg)

![[AI08] 深層学習フレームワーク Chainer × Microsoft で広がる応用](https://cdn.slidesharecdn.com/ss_thumbnails/ai08-170705031536-thumbnail.jpg?width=640&height=640&fit=bounds)






![[AI05] 目指せ、最先端 AI 技術の実活用!Deep Learning フレームワーク 「Microsoft Cognitive Toolkit 」...](https://cdn.slidesharecdn.com/ss_thumbnails/ai05-170602095345-thumbnail.jpg?width=640&height=640&fit=bounds)







































