BAB I
PENDAHULUAN
Latar Belakang
Salah satu pendekatan yang dapat dilakukan untuk menyelesaikan masalah manajemen sains adalah pemrograman linear. Pemrograman linear merupakan kelompok teknik analisis kuantitatif yang mengandalkan model matematika atau model simbolik sebagai wadahnya. Artinya, setiap masalah yang kita hadapi dalam suatu sistem permasalahan tertentu perlu dirumuskan dulu dalam simbol-simbol matematika tertentu, jika kita inginkan bantuan pemrograman linear sebagai alat analisisnya.
Metode grafik merupakan salah satu metode yang dapat digunakan untuk menyelesaikan masalah pemrograman linear yang melibatkan dua peubah keputusan. Membahas mengenai masalah meminimumkan fungsi kendala bertanda ≥, fungsi kendala bertanda = tidak ada penyelesaian layak, tidak ada penyelesaian optimal, beberapa alternatif optimal, dan wilayah kelayakan yang tidak terikat dapat terjadi saat menyelesaikan masalah pemrograman linear dengan menggunakan prosedur penyelesaian grafik. Kasus-kasus ini juga dapat terjadi saat menggunakan metode simpleks.
Metode simplek untuk linier programming dikembangkan pertama kali oleh George Dantzing pada tahun 1947, kemudian digunakan juga pada penugasan di Angkatan Udara Amerika Serikat. Dia mendemonstrasikan bagaimana menggunakan fungsi tujuan (iso-profit) dalam upaya menemukan solosi diantara beberapa kemungkinan solosi sebuah persoalan linier programming.
Proses penyelesaiaanya dalam metode simplek, dilakukan secara berulang-ulang (iterative) sedemikian rupa dengan menggunakan pola tertentu (standart) sehingga solusi optimal tercapai.
Ciri lain dari metode simplek adalah bahwa setiap solusi yang baru akan menghasilkan sebuah nilai fungsi tujuan yang lebih besar daripada solosi sebelumnya.
Rumusan Masalah
Adapun rumusan masalah yang akan dibahas dalam makalah ini adalah sebagai berikut:
Bagaimana cara mencari nilai maksimum dengan menggunakan metode simpleks?
Bagaimana cara menyelesaikan masalah/kendala (syarat) bertanda “=”?
Bagaimana cara mencari nilai minimum dengan menggunakan metode simpleks?
Bagaimana cara membedakan antara asalah primal dan dual dalam program linear?
Kapan pemrograman linear dikatakan mengalami degenerasi?
Tujuan
Adapun tujuan dari penulisan makalah ini antara lain :
Dapat menyelesaikan masalah maksimasi dalam program linear
Dapat menyelesaikan masalah / kendala (syarat) bertanda “=” pada program linear
Dapat menyelesaikan masalah minimasi dalam program linear
Dapat mengetahui dan membedakan antara masalah primal dan dual dalam program linear
Dapat menyelesaikan masalah degeneracy / kemerosotan dalam program linear
BAB II
PEMBAHASAN
Masalah Maksimasi
Untuk menyelesaikan masalah maksimasi maka programasi linear harus lebih dahulu ditulis dalam bentuk standar. Dengan bentuk standar dimaksudkan adalah permasalahan programasi linear yang berwujud permasalahan maksimasi dengan batasan-batasan (kendala) yang bertanda kurang dari
materi IPA kls 9 SMP tentang sistem reproduksi pada manusia yang dibuat secara ringkas untuk materi pelengkap mengajar bagi bapak dan ibu guru, semoga berguna...
BAB I
PENDAHULUAN
Latar Belakang
Salah satu pendekatan yang dapat dilakukan untuk menyelesaikan masalah manajemen sains adalah pemrograman linear. Pemrograman linear merupakan kelompok teknik analisis kuantitatif yang mengandalkan model matematika atau model simbolik sebagai wadahnya. Artinya, setiap masalah yang kita hadapi dalam suatu sistem permasalahan tertentu perlu dirumuskan dulu dalam simbol-simbol matematika tertentu, jika kita inginkan bantuan pemrograman linear sebagai alat analisisnya.
Metode grafik merupakan salah satu metode yang dapat digunakan untuk menyelesaikan masalah pemrograman linear yang melibatkan dua peubah keputusan. Membahas mengenai masalah meminimumkan fungsi kendala bertanda ≥, fungsi kendala bertanda = tidak ada penyelesaian layak, tidak ada penyelesaian optimal, beberapa alternatif optimal, dan wilayah kelayakan yang tidak terikat dapat terjadi saat menyelesaikan masalah pemrograman linear dengan menggunakan prosedur penyelesaian grafik. Kasus-kasus ini juga dapat terjadi saat menggunakan metode simpleks.
Metode simplek untuk linier programming dikembangkan pertama kali oleh George Dantzing pada tahun 1947, kemudian digunakan juga pada penugasan di Angkatan Udara Amerika Serikat. Dia mendemonstrasikan bagaimana menggunakan fungsi tujuan (iso-profit) dalam upaya menemukan solosi diantara beberapa kemungkinan solosi sebuah persoalan linier programming.
Proses penyelesaiaanya dalam metode simplek, dilakukan secara berulang-ulang (iterative) sedemikian rupa dengan menggunakan pola tertentu (standart) sehingga solusi optimal tercapai.
Ciri lain dari metode simplek adalah bahwa setiap solusi yang baru akan menghasilkan sebuah nilai fungsi tujuan yang lebih besar daripada solosi sebelumnya.
Rumusan Masalah
Adapun rumusan masalah yang akan dibahas dalam makalah ini adalah sebagai berikut:
Bagaimana cara mencari nilai maksimum dengan menggunakan metode simpleks?
Bagaimana cara menyelesaikan masalah/kendala (syarat) bertanda “=”?
Bagaimana cara mencari nilai minimum dengan menggunakan metode simpleks?
Bagaimana cara membedakan antara asalah primal dan dual dalam program linear?
Kapan pemrograman linear dikatakan mengalami degenerasi?
Tujuan
Adapun tujuan dari penulisan makalah ini antara lain :
Dapat menyelesaikan masalah maksimasi dalam program linear
Dapat menyelesaikan masalah / kendala (syarat) bertanda “=” pada program linear
Dapat menyelesaikan masalah minimasi dalam program linear
Dapat mengetahui dan membedakan antara masalah primal dan dual dalam program linear
Dapat menyelesaikan masalah degeneracy / kemerosotan dalam program linear
BAB II
PEMBAHASAN
Masalah Maksimasi
Untuk menyelesaikan masalah maksimasi maka programasi linear harus lebih dahulu ditulis dalam bentuk standar. Dengan bentuk standar dimaksudkan adalah permasalahan programasi linear yang berwujud permasalahan maksimasi dengan batasan-batasan (kendala) yang bertanda kurang dari
materi IPA kls 9 SMP tentang sistem reproduksi pada manusia yang dibuat secara ringkas untuk materi pelengkap mengajar bagi bapak dan ibu guru, semoga berguna...
02.19. Menentukan Luas Segitiga Sembarang Menggunakan Bahasa Pemrograman C++BayuYudhaSaputra
Menentukan Luas Segitiga Sembarang Menggunakan Bahasa Pemrograman C++ akan dibahas dalam postingan ini. Contoh program c++ ini termasuk contoh program c++ sederhana, contoh program c++ dan hasil, contoh program c++ perhitungan, contoh program c++ matematika serta contoh program c++ geometri.
Untuk menyelesaikan masalah ini, langkah-langkah yang harus dilakukan adalah:
Langkah 1. Input absis titik pertama
Langkah 2. Input ordinat titik pertama
Langkah 3. Tampilkan titik pertama
Langkah 4. Input absis titik kedua
Langkah 5. Input ordinat titik kedua
Langkah 6. Tampilkan titik kedua
Langkah 7. Input absis titik ketiga
Langkah 8. Input ordinat titik ketiga
Langkah 9. Tampilkan titik ketiga
Langkah 10. Tentukan jarak titik 1 dengan 2
Langkah 11. Tampilkan jarak titik 1 dengan 2
Langkah 12. Tentukan jarak titik 1 dengan 3
Langkah 13. Tampilkan jarak titik 1 dengan 3
Langkah 14. Tentukan jarak titik 2 dengan 3
Langkah 15. Tampilkan jarak titik 2 dengan 3
Langkah 16. Tentukan setengah keliling
Langkah 17. Tentukan luas segitiga
Langkah 18. Tampilkan luas segitiga
Liang. 2014. Introduction to Programming with C++ 3rd Edition. London: Pearson Education yang bisa diakses pada tautan berikut:
https://www.pearson.com/en-us/subject-catalog/p/Liang-Companion-Website-for-Introduction-to-Programming-with-C-Access-to-Videonotes-3rd-Edition/P200000003422/978013338026
Baris kode ini bisa diakses pada tautan berikut:
https://github.com/bayuYudhaSaputra/introduction-programming-CPP-liang/blob/main/02.19.AreaTriangle.cpp
Oleh : #bayuyudhasaputra
Graf dengan panjang, dalam konteks teori graf, adalah jenis graf yang memiliki atribut atau bobot yang menunjukkan panjang atau jarak antara pasangan simpul atau node. Attribut ini biasanya digunakan untuk mewakili hubungan antar simpul dalam suatu jaringan, seperti jarak antara kota-kota dalam peta atau biaya transportasi antar titik dalam suatu infrastruktur.Graf dengan panjang memiliki aplikasi yang luas dalam berbagai bidang, termasuk perencanaan rute, logistik, telekomunikasi, dan optimisasi. Mereka memungkinkan perhitungan yang lebih akurat tentang bagaimana mencari jalur terpendek, biaya terendah, atau hubungan terkuat antara simpul-simpul dalam jaringan. Contoh graf dengan panjang termasuk graf terarah dengan panjang terpendek (Dijkstra), graf berbobot, dan graf jaringan telekomunikasi.
Setelah mempelajari modul ini diharapkan Anda dapat:
1. memahami definisi dari integral
2. memahami integral tak tentu beserta penerapannya.
3. memahami integral fungsi trginometri, integral substitusi dan integral parsial.
4. memahami integral tertentu dan penerapannya.
5. menentukan luas daerah dengan beberapa kurva, luas daerah antara kurva dengan sumbu koordinat dan luas daerah antara dua kurva
6. menentukan volume benda putar antara kurva dan sumbu koordinat (sumbu x dan sumbu y), volume benda putar antara dua kurva yang memutari sumbu x dan sumbu y.
1. Representasi Obyek 3D
Dalam computer grafik, obyek 3D bisa dinyatakan dalam banyak cara.
Sebuah permukaan obyek secara analitis bisa dihasilkan dari fungsi geometris
yang mengandung koordinat-koordinatnya. Atau dengan cara lain, sebuah obyek
bisa dinyatakan sebagai titik-titik (verteks), sisi-sisi (edges) dan polygon.
Pemodelan obyek yang menggunakan elemen-elemen polygon merupakan metode
yang paling umum digunakan, dan juga mudah untuk di aplikasikan kedalam
berbagai algoritma grafik. Kurva dan permukaan bisa di desain menggunakan
spline dengan cara mengatur titik-titik kontrolnya.
Grafika komputer 3D adalah grafik yang menggunakan representasi data
geometri 3D yang disimpan dalam komputer untuk keperluan perhitunganperhitungan dan rendering citra 2D. Citra ini disimpan untuk viewing atau
ditampilkan secara real-time. Grafika komputer 3D sering disebut sebagai model
3D yang lebih menekankan pada representasi matematis untuk obyek 3D. Data
matematis ini belum bisa disebut sebagai gambar grafis sebelum ditampilkan
secara visual pada layar komputer atau printer. Proses menampilkan model
matematis ke bentuk citra 2D dikenal dengan istilah rendering 3D. Tujuan dari
pemodelan ini adalah untuk mengembangkan algoritma-algoritma analisis 3D
yang meliputi:
Reconstruction, Segmentation, Feature Detection, Labeling,
Matching, Classification, Retrielval, Recognition, dan Clustering.
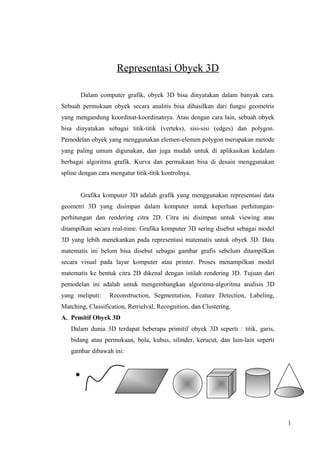
A. Prmitif Obyek 3D
Dalam dunia 3D terdapat beberapa primitif obyek 3D seperti : titik, garis,
bidang atau permukaan, bola, kubus, silinder, kerucut, dan lain-lain seperti
gambar dibawah ini:
•
1
2. B. Representasi Obyek 3D
Pada umumnya obyek di alam berada dalam ruang 3D. Oleh karena itu
komputer grafik membuat tiruan dari obyek-obyek tersebut untuk ditampilkan
di layar, agar menyerupai obyek yang sebenarnya. Tiruan-tiruan obyek ini
disebut model 3D (representasi dari obyek 3D), yang berguna untuk
merepresentasikan obyek 3D. Untuk membuat model diperlukan pemodelan
yaitu kreasi dan manipulasi dari representasi sebuah obyek atau sistem. Dalam
aplikasi grafis, obyek 3D dapat direpresentasikan dalam banyak cara,
diantaranya adalah:
1. Curved Surfaces (Kurva Permukaan)
Suatu obyek 3D dapat direpresentasikan langsung menggunakan
persamaan geometri berupa kurva permukaan dari obyek tersebut. Kurva
(curve) dan permukaan (surface) sering dikenal dalam bidang geometri.
Kurva adalah kumpulan titik yang membentuk garis lurus atau
lengkungan. Permukaan (surface) adalah struktur matematis yang
terbentuk dari himpunan kurva.
Gambar 1: menunjukkan beberapa permukaan kurva yang dispesifikasikan
dengan sebuah persamaan berikut :
Lingkaran berpusat di (0,0) dan jari-jari r = 5
z
x 2 + y 2 + z 2 = 25
5
y
x
2
3. Double cones :
Ellipsoids :
Hyperboloids of one sheet :
Hyperboloids of two sheets :
Elliptic paraboloids :
Hyperbolic paraboloids :
x2 y2 z2
+
−
=0
a2 b2 c2
x2 y2 z2
+
+
=1
a2 b2 c2
x2 y2 z2
+
−
=1
a2 b2 c2
−
x2 y2 z2
−
+
=1
a2 b2 c2
x2 y2 z
+
=
a2 b2 c
−
x2 y2 z
+
=
a2 b2 c
3
4. Permukaan yang terbentuk dari himpunan kurva Bezier
Gambar 1: Beberapa permukaan kurva yang diperoleh dari persamaan
geometri
2.
Constructive Solid Geometry (CSG)
Obyek real dan maya (virtual) dapat dinyatakan dengan model padat
(solid) seperti bola, silinder, dan kerucut atau dapat dinyatakan sebagai
model permukaan seperti segitiga, segi empat atau polygon. Model
permukaan bisa di render menggunakan object-order rendering atau
image-order rendering (yaitu ray-tracing).
Sedangkan model padat (solid) hanya bisa dirender menggunakan raytracing. Model padat umumnya digunakan untuk menjelaskan bentukbentuk buatan manusia seperti Computer Aided Design (CAD) atau
Computer Assisted Manufacturing (CAM). Model-model solid konstruktif
bisa terdiri dari bentuk-bentuk primitif berikut: bola, silinder, piramida,
kubus, dan kerucut, akan tetapi tidak bisa terdiri atas separuh ruang seperti
titik, garis dan bidang.
Constructive Solid Geometry (CSG) adalah gabungan beberapa obyek
solid yang dibentuk secara geometry dengan menggunakan operator
gabungan (union), irisan (intersection), dan selisih (difference).
2.1. Proses Ray-Tracing pada CSG
Untuk menjelaskan proses ray-tracing pada CSG digunakan konsep
selang waktu t (Gambar 8-3). Bila t bertanda plus (+) artinya waktu
4
5. dari sebuah cahaya saat berjalan melalui obyek. Bila t bertanda minus
(−) artinya waktu dari sebuah cahaya saat tidak pada obyek.
Arah cahaya
t = − − − − − − − +++++++ − − − − − − −
Gambar 3: Proses ray-tracing pada CSG menggunakan konsep selang
waktu t
2.1.1. Proses ray-tracing CSG untuk operasi Union (Gabungan)
Union adalah proses menggabungkan dua obyek menjadi satu
obyek agar pada obyek hasil gabungan bisa dilakukan manipulasi.
Gambar 4(a) menunjukan konsep selang waktu untuk proses union
dari kubus dengan bola.
=
t1 = − − +++++++ − − −
t2 = − − ++++++++ − − t1 ∪ t 2 =
− − ++++++++ − −
Gambar 4(a): Contoh union dari kubus dengan bola
2.1.2.
Proses ray-tracing CSG untuk operasi Intersection
( Irisan )
Intersection dari dua buah obyek diperoleh dengan cara
mengambil
perpotongan
dari
tersebut.
Gambar
4(b)
menunjukkan konsep selang waktu untuk proses intersection
antara kubus dengan bola.
5
6. =
t1 = − − +++++++ − − −
t2 = − − ++++++++ − −
t1 ∩ t 2 = − − −++++++− − −
Gambar 4(b) Contoh intersection antara kubus dengan bola.
2.1.3.
Proses ray-tracing CSG untuk operasi Difference
( Selisih )
Secara teori difference dihasilkan dari proses pengurangan
obyek A oleh obyek B seperti Gambar 8-4(c). Akan tetapi dalam
prakteknya operasi selisih diganti dengan menghilangkan
volume padat yang berpasangan (yang posisinya sama).
−
=
Gambar 4(c) Contoh difference antara kubus dengan bola.
Konsep selang waktu untuk proses difference dari dua obyek,
dapat dijelaskan sebagai berikut:
t1 = − − + + + + + − − − − + + + + + − −
t2 = − − − − − + + + − − + + + + + − − −
t3 = − − + + + − − − − − − − − − − + − −
t 3 = t1 − t 2
Gambar 4: Obyek solid yang dibentuk dari operator gabungan
(union), irisan (intersection), dan selisih (difference).
Operasi CSG tidak komutatif:
6
7. Operasi CSG tidak unik:
Tiga masalah yang ada pada operasi CSG yaitu:
7
8. 3. Polyhedra
Obyek merupakan gabungan dari permukaan-permukaan polygon yang
tertutup hingga membentuk sebuah obyek baru. Perhatikan Gambar 5.
8
9. Gambar 8-5: Polyhedra (gabungan dari permukaan-permukaan polygon
yang tertutup)
4. Sweep Representation
Sweep representation adalah model 3D yang titik-titik geometrinya
dihasilkan oleh perputaran titik-titik dari kurva spline atau lainnya
terhadap sumbu putar tertentu. Perputaran ini tidak harus 360°. Bisa juga
kurang dari 360° sehingga obyek yang terbentuk berupa penampang
lintang dari obyek hasil perputaran 360°. Perhatikan Gambar 6.
Contoh:
Diputar 360o
Diputar 270o
Gambar 8-7: sebuah kurva setelah diputar menjadi sebuah obyek
Sweep representation juga bisa dihasilkan dengan cara menarik luasan 2D
sepanjang sumbu yang tegak lurus dengan bidang luasan tersebut.
Torus dihasilkan dengan cara memutar kurva lingkaran mengitari
lingkaran.
9
10. Sweep-sphere volume dihasilkan dengan cara menggerakkan kurva bola
sepanjang lintasan parabola.
Sweep-cylinder volume dihasilkan dengan cara menggerakkan kurva
silinder sepanjang lintasan parabola.
5. Surface of Revolution
Surface of revolution adalah permukaan yang dihasilkan dengan cara
memutar kurva 2D terhadap sumbu putarnya. Karena itu permukaan yang
dihasilkan selalu mempunyai simetri azimut (azimuthal symmetry).
10
11. 6. Quad Trees
Quad trees dihasilkan dengan cara membagi wilayah gambar 2D menjadi
empat kuadraan. Jika semua piksel yang ada didalam sebuah kuadran
warnanya sama, maka elemen data yang tersimpan bisa homogen (sama).
Jika tidak demikian maka sebuah kuadran tersebut dibagi lagi menjadi
empat bagian sampai semua kuadran homogen.
11
12. 7. Octrees
Octrees dihasilkan dengan cara membagi wilayah obyek 3D
menjadi delapan bagian (kuadraan).
8. Fraktal
Fraktal adalah kurva yang membentuk suatu pola dimana suatu
bagian kecil dari kurva itu polanya sama dengan bagian yang lebih besar.
Karena itu fraktal bisa dipecah-pecah menjadi beberapa bagian yang lebih
kecil yang semuanya mirip dengan fraktal aslinya. Kurva fraktal
mempunyai karakteristik homogen, yaitu memiliki struktur pola yang
sama pada tingkat perbesaran yang berbeda. dan karakteristik tak hingga,
12
(a)
(b)
(c)
13. karena fraktal dihasilkan dengan cara mengulang suatu pola, biasanya
dalam proses rekursif atau iteratif (Gambar 8).
Gambar 8-8: (a) Segitiga Sierpinski, suatu fraktal, bisa dipecah menjadi
tiga segitiga Sierpinski (masing-masing diberi warna berbeda). (b)
himpunan Cantor yang serupa diri pada perbesaran 10 kali. (c) Suatu
himpunan Julia, fraktal yang berhubungan dengan himpunan Mandelbrot.
9.
Pemodelan Obyek 3D menggunakan Polygon
Permukaan obyek 3D bisa dibuat dari polygon dan elemen garis. Untuk
konfigurasi awal sebuah obyek, koordinat verteks dari polygon dan titiktitik ujung garis didefinisikan sesuai dengan sistem koordinat 3D.
Struktur data untuk representasi obyek 3D terdiri dari :
(i) Tabel verteks/ tabel node yang berisi koordinat 3D dari masingmasing titik verteks polygon dan titik ujung garis
(ii) Tabel sisi (edge) yang berisi definisi dari konektivitas edge dalam
bentuk node-node dari titik ujung.
(iii)
Tabel polygon yang berisi verteks dari masing-masing polygon.
Contoh
V3
E3
V4
Tabel polygon
P1 : E1, E2, E4
P2 : E3, E4, E5
E2
E4
E5
V2
E1
V1
Tabel titik (Vertex)
V1 : x1, y1, z1
V2 : x2, y2, z2
V3 : x3, y3, z3
V4 : x4, y4, z4
Tabel sisi (edge)
E1 : V1, V2
E2 : V2, V3
E3 : V3, V4
E4 : V1, V3
E5 : V1, V4
13