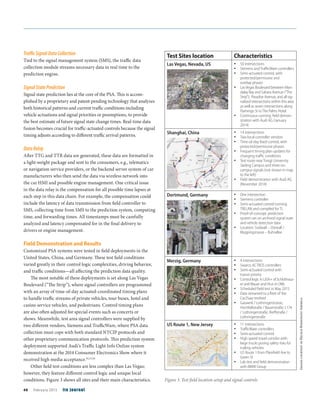
This document describes an online traffic signal state prediction system called the Personal Signal Assistant (PSA) that provides predicted times to green (TTG) and times to red (TTR) to connected vehicles. The PSA system architecture includes signal data collection from field controllers, signal state prediction using historical and real-time traffic data, and relaying predictions to vehicles. The PSA system was tested in multiple cities and demonstrated accurate predictions within 2-3 seconds of latency. Field tests showed safety and efficiency benefits like reduced stops and informed drivers when views of signals were blocked. Support from transportation agencies was critical for demonstrations of this connected vehicle application.