Download to read offline









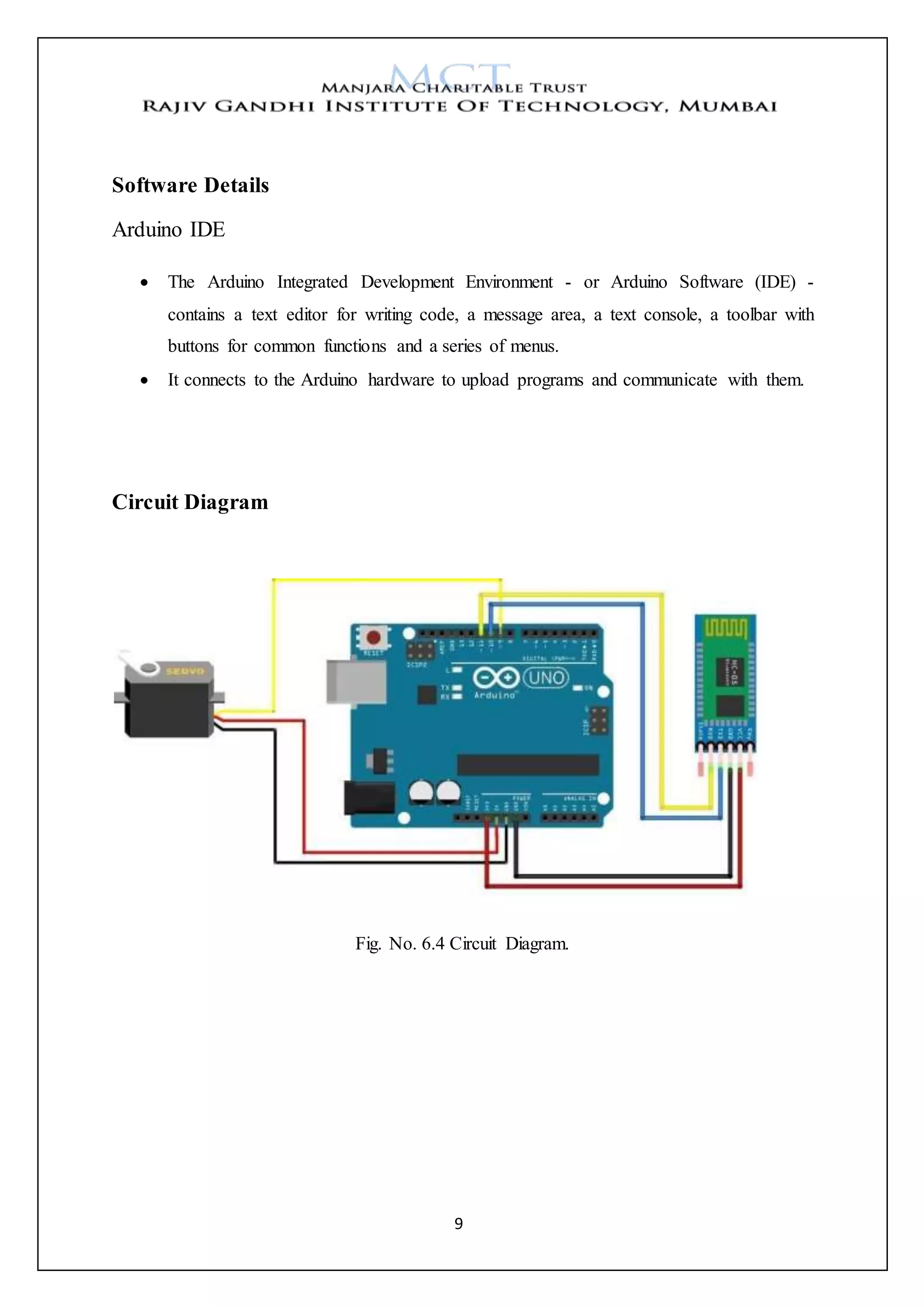

This document provides a summary report on a pet feeder project based on an Arduino Uno. The project was completed by three students - Harsh Dobariya, Akshay Kalapgar, and Mohit Kamble - under the guidance of their internal guide, Mr. Swapnil Gharat. The report includes an introduction to the project, aims and objectives, a literature review, a description of the proposed system, implementation details, and details of the hardware and software used. The proposed system is an automatic pet feeder controlled by a smartphone that uses a servo motor, Arduino Uno, and Bluetooth module to remotely feed pets based on input from a mobile app.