M
A
G
L
A
B
.
j
p
3
(C) MAGLAB Inc.
電気通信大学電子工学科 音声認識学
富士通株式会社にて ASP サービス運用構築、その後
マイクロソフトにて インフラマネジメントを中心に
複数の大規模プロジェクトを経験。2012年よりウイ
ングアークにて 開発企画・クラウド事業チーム、特
に 2015年より技術アライアンス/IoT 事例を多数対応、
2017年に 世の中のDXプロジェクトが失敗の多いこと
を課題と考え MAGLABを立ち上げる。
また、集合写真家としても幅広く活動。
MAGLAB 代表取締役 / 伴走屋 武市 真拓
IoT + AI + Cloud + Producer + Art
『ハード、AI、プロマネ、クラウドビジネスと、多分野
の関わりと繋がりがDX実現に求められるスキルでした。』
4.
M
A
G
L
A
B
.
J
P
MAGLAB Inc. Allrights reserved.
4
4
MAGLABの歩み
2018年 PoC貧乏、PoC死の救済
2019年 IoTサービスコンサル、サービス化
2020年 AirSTATUSの立ち上げ、爆速実装IoT
5.
M
A
G
L
A
B
.
J
P
MAGLAB Inc. Allrights reserved.
5
5
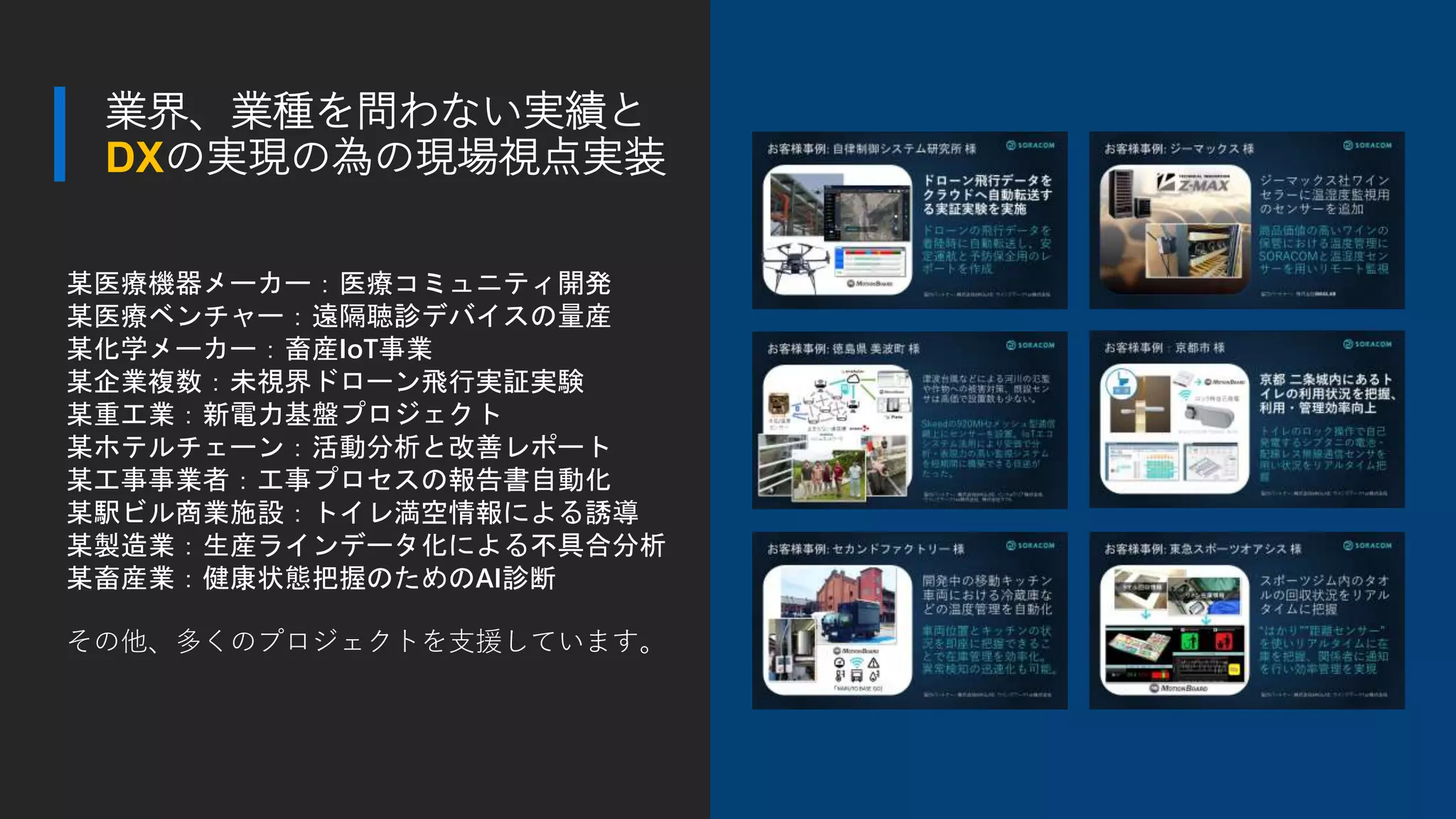
MAGLAB : DX時代のIoT/AI の専門家集団
MAGLABは、DX時代の技術実装を行う専門家が集っています。
60社以上のパートナー企業と共にIoT/AI導入のご相談から、
実装やサービス立ち上げ時のコンサルティングと開発を
様々な経験を元としたノウハウをもとに提供します。
SORACOM Discovery 2019: プラチナスポンサー
クラウドをはじめハードウェア、AI、データ分
析、デザインを専門とするエンジニアがプロ
ジェクトに対応します。
株式会社MAGLAB
代表: 武市 真拓
資本金:1,000,000 円 (設立2017年3月)
メンバー:32名
拠点:本社(高知県)、ラボ(東京都渋谷区、港区、江東区)
1. IoT/AI PoC (実証実験) 提供/支援
2. IoT/AI プロジェクトの導入支援
3. IoT/AI サービス企画・実行支援
4. IoT/AI プロトタイプ作成
5. IoT/AI ハンズオン企画運営
6. IoT/AI トレーニング企画運営
7. IoT/AI ハッカソン企画運営
8. 集合写真/動画の撮影・編集
m
a
g
l
a
b
.
j
p
MAGLAB Inc. Allrights reserved.
9
課題の質はで作る - 湯守 YUMORI
安心を伝える
当たり前
シンプルで邪魔に
ならず機能を満たす
デバイスがなかった
→自分で作った
による
通知・分担・分析
開発と改善が早く
できた
お客様からの
評価も高く、
コロナ以降も
継続望まれる
全国で数十か所
への設置、現地
スタッフがみずから取付
できる必要がある
10.
m
a
g
l
a
b
.
j
p
MAGLAB Inc. Allrights reserved.
10
あれから1年 現場とともに成長
ファームとセンサー位置
の見直しにより性能アップ
壁埋め込み型
薄型/基板一体型
センサ間3cm拡張
計測回数 20FPS ➡ 30FPS
初号機
アンテナ性能向上
メンテナンス性向上
m
a
g
l
a
b
.
j
p
MAGLAB Inc. Allrights reserved.
12
課題の質はで作る - 門守 KADOMORI
待たせない
への挑戦
防犯システムを見直し
AI機能追加による、
お客様車両の検知
による
通知・分担・分析
開発も改善も早い
現場から、
「気づけた」
の声多数、
好評価
新規車両のみ
を判別、周遊で戻った
お客様や業務車両は
除外する
m
a
g
l
a
b
.
j
p
MAGLAB Inc. Allrights reserved.
14
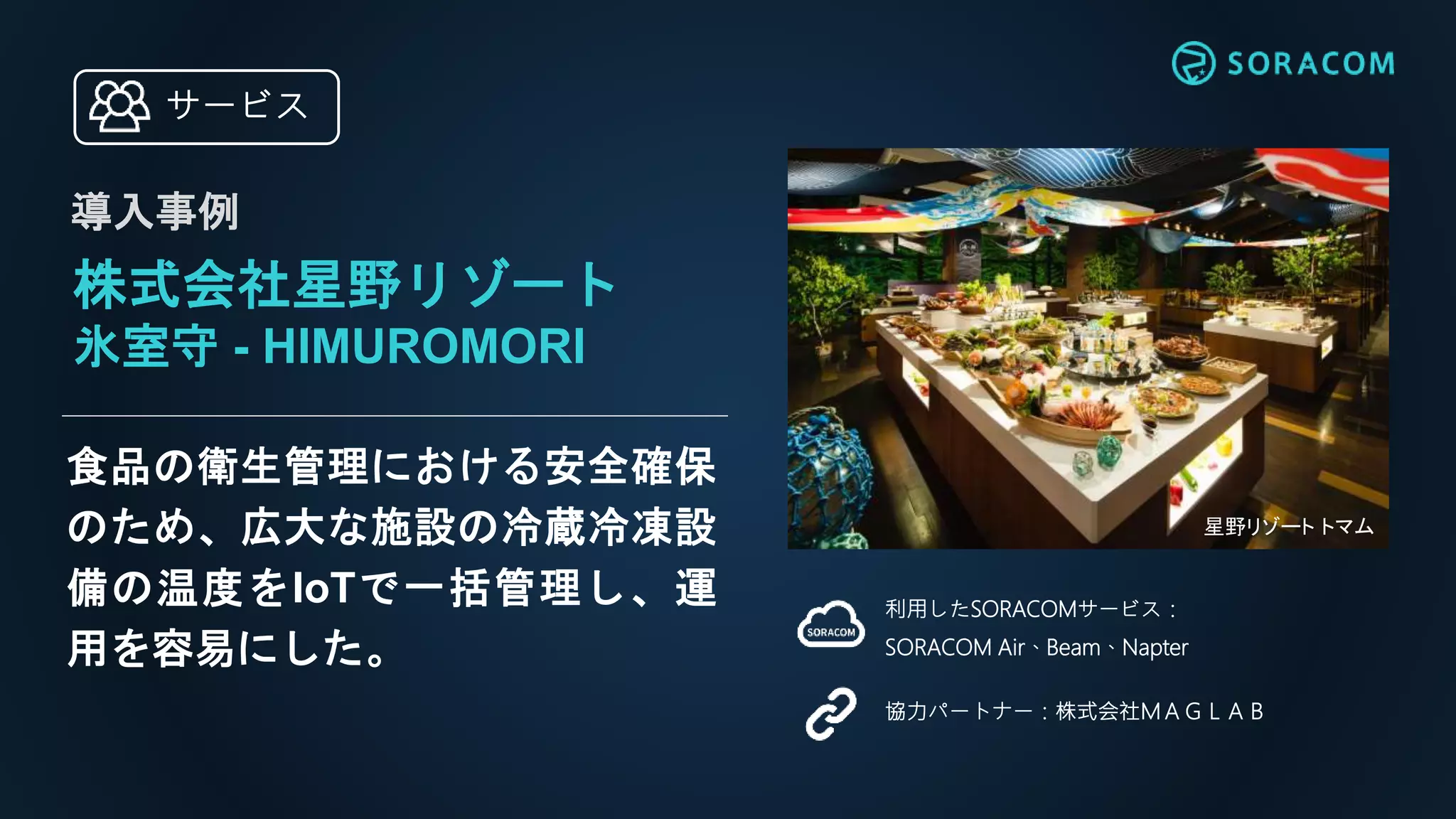
課題の質はで作る - 氷室守 HIMUROMORI
美味しさと
安全に生産性
をも追及
温度プローブが作る
隙間と結露を作らない
センサーデバイス
による
通知・分担・分析
で改善が簡単
広大な施設内での
管理がIoTで簡単に
なった
ネットワーク環境
が様々でどんな環境でも
迅速に展開できる仕組みが
必要であった
m
a
g
l
a
b
.
j
p
MAGLAB Inc. Allrights reserved.
16
課題の質は現場で作る - ランドリー利用把
握
行って使えない
のがっかりを
なくす
洗濯物をもって
行っても使えない
のがっかり経験
fonfunアプリ
との連係開発
も短期間で
実現できた
お客様のがっかり
が減り評価も高い
後付け簡単設置が
可能であること
m
a
g
l
a
b
.
j
p
MAGLAB Inc. Allrights reserved.
18
課題の質は現場で作る - ANA 混雑把握
利便性
データ活用
への継続的調整
お客様への
安心、安全への
継続投資
電源につなぐだけ
の簡単設置
新しい技術への
積極的チャレンジ
継続的な技術探索
シンプルで
分かりやすい
使いやすい
m
a
g
l
a
b
.
j
p
MAGLAB Inc. Allrights reserved.
20
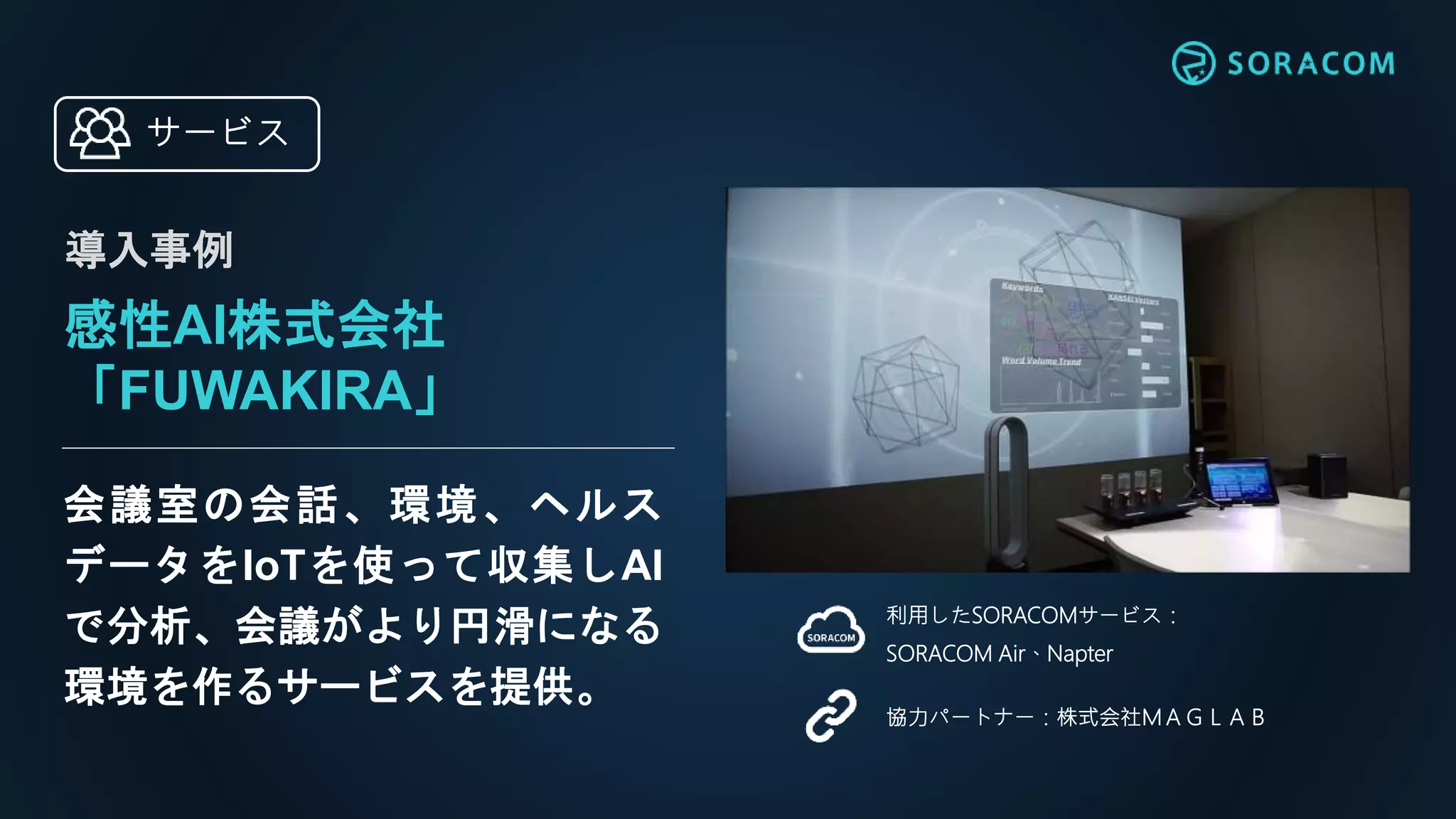
課題の質は現場で作る - オフィス価値の再
定義
学術研究の
を社会活用に
低コストと
スピードを
京王電鉄X電気通信大学
IoTとAI技術の融合
新しい技術への
積極的チャレンジ
開発に注力ができる
ようになり、AIで
リラックス環境を
分析し演出
複数台のPC運用
プロジェクション
を1台にしたい
→ 独自のプロジェクション
アプリの開発
プロジェクション用
素材の共通化と設置
コストが大幅低減され、
管理も簡単になった。
m
a
g
l
a
b
.
j
p
MAGLAB Inc. Allrights reserved.
22
課題の質は現場で作る - HACCP運用の進化
を
最適な
デバイスと分析
の短期提供
世の中にセンサーの
選択肢が多くあり
過ぎて、どれが
最適解かわから
なかった
現場に適した
デバイスの選択枝
が明確になり提案が
スピードアップ
開発期間を最適化
して、お客様に応じた
改善を催促で行いたい
データ蓄積と活用が進み、
分析ツールとの組み合
わせで運用が強化できた
m
a
g
l
a
b
.
j
p
MAGLAB Inc. Allrights reserved.
24
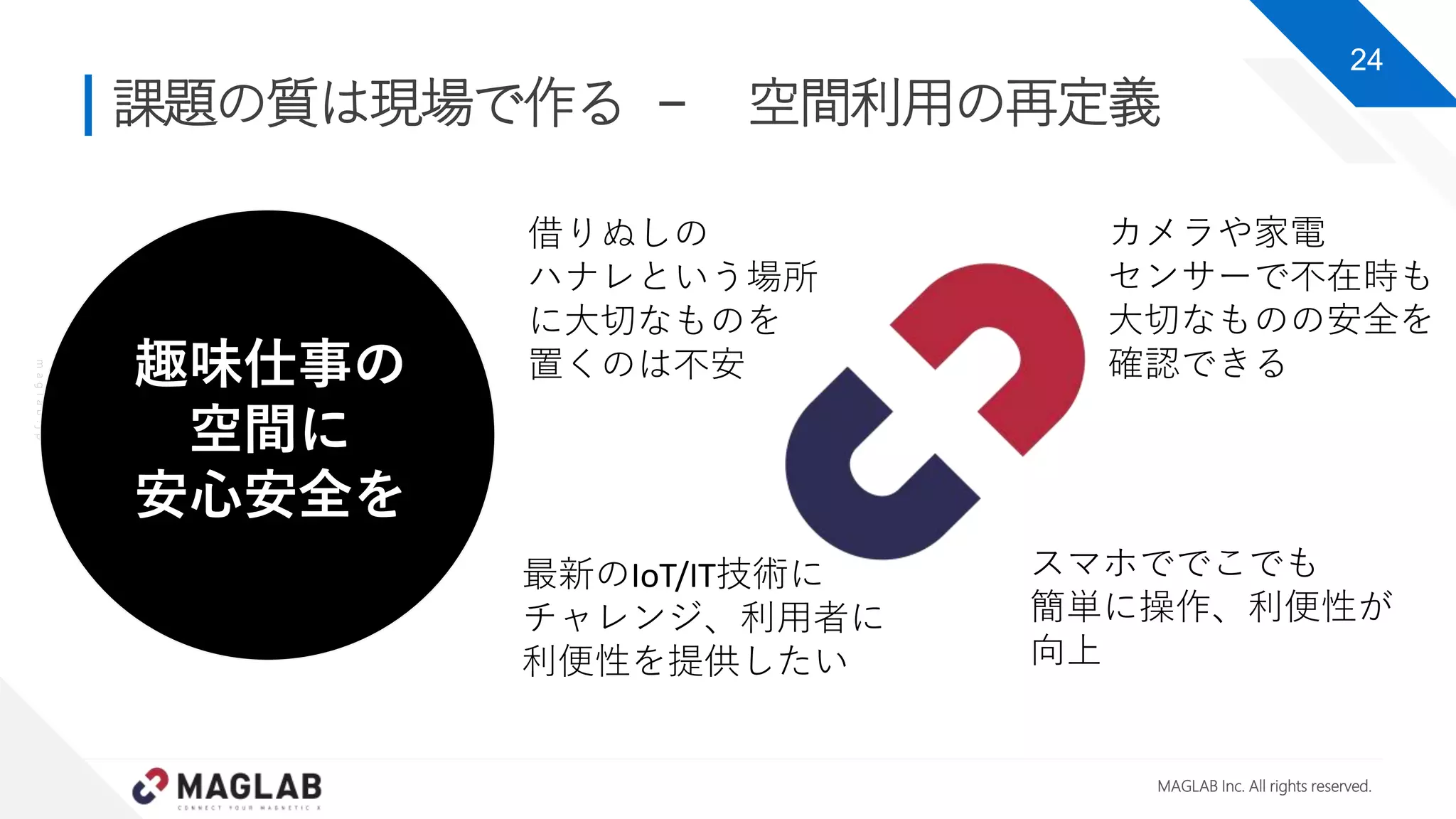
課題の質は現場で作る - 空間利用の再定義
趣味仕事の
空間に
安心安全を
借りぬしの
ハナレという場所
に大切なものを
置くのは不安
カメラや家電
センサーで不在時も
大切なものの安全を
確認できる
最新のIoT/IT技術に
チャレンジ、利用者に
利便性を提供したい
スマホででこでも
簡単に操作、利便性が
向上
m
a
g
l
a
b
.
j
p
MAGLAB Inc. Allrights reserved.
27
課題の質は現場で作る - 下水疫学調査の普
及
「普及価格」
という壁への
チャレンジ
サンプラーが広く
使われるには運用
の手間を省く必要
がある
IoTで稼働や運用を
遠隔操作することで
現場対応を最小限に
デバイスの大きさ、
重さ、価格が設置場所
の制約に
数分の1の値にすること
で普及への足掛かりを
実現
m
a
g
l
a
b
.
j
p
MAGLAB Inc. Allrights reserved.
31
《 CONFIDENTIAL 》
“失敗するIoTプロジェクト” あるある
1.ユーザーによる解決したい“課題”が見えてない
2.“終わる条件(期間、ゴール)”を決めていない
3.営業の期待値(にんじん)のみで”無対価”で実施
4.“本番を想定”して評価と設計
5.現場が”遠い”でも良く”行く”
6.新しい”デバイス”でハマる
7.十分なデータが貯まらない
32.
m
a
g
l
a
b
.
j
p
MAGLAB Inc. Allrights reserved.
32
《 CONFIDENTIAL 》
32
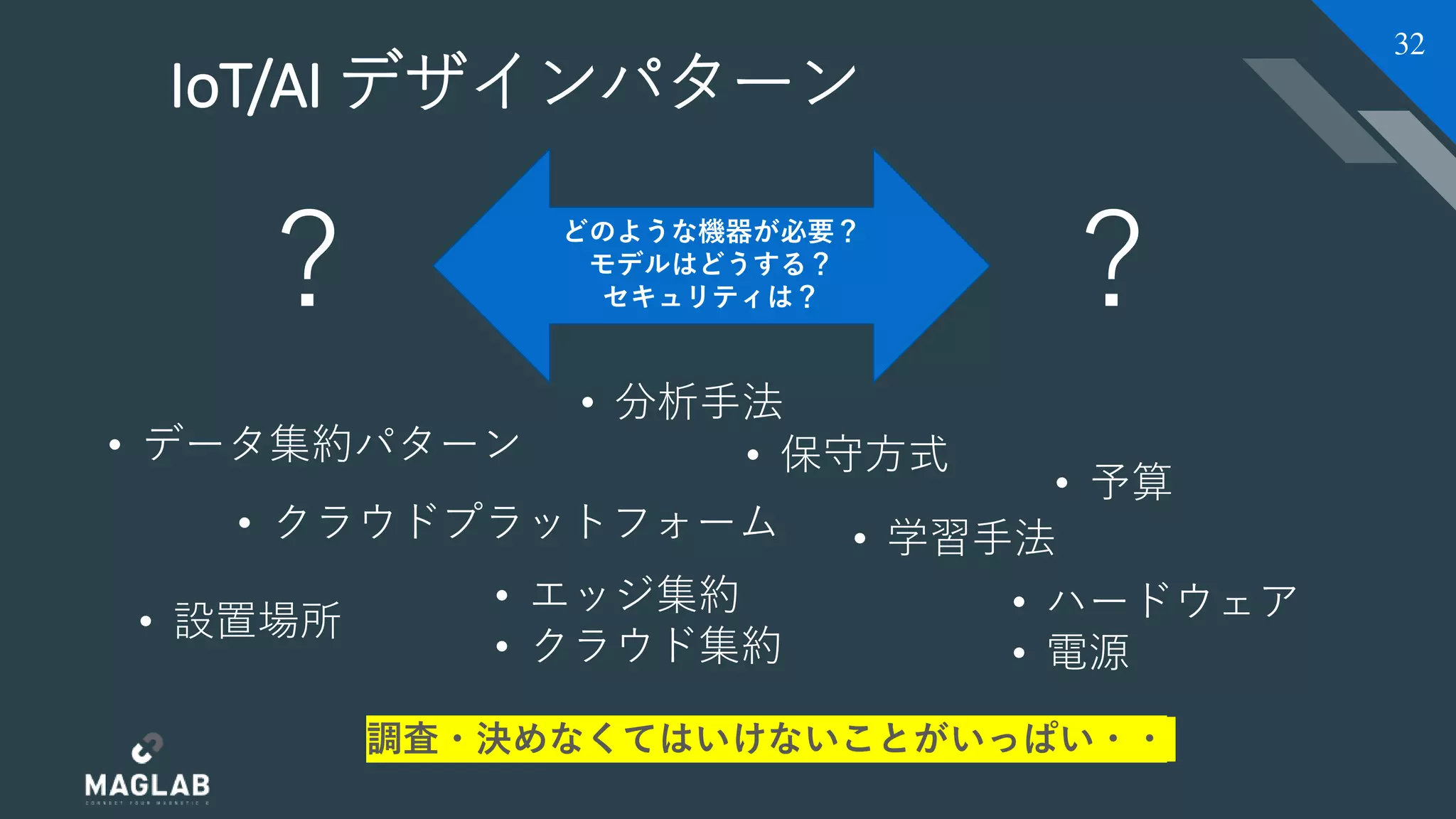
IoT/AI デザインパターン
どのような機器が必要?
モデルはどうする?
セキュリティは?
? ?
• データ集約パターン • 保守方式
• エッジ集約
• クラウド集約
調査・決めなくてはいけないことがいっぱい・・
• ハードウェア
• 電源
• クラウドプラットフォーム
• 設置場所
• 予算
• 学習手法
• 分析手法
33.
m
a
g
l
a
b
.
j
p
MAGLAB Inc. Allrights reserved.
33
《 CONFIDENTIAL 》
33
“課題”から選択する DX実装
IoT技術
費用削減
作業の改善 課題
運用の
省力化
課題
収益増加 新たな価値 課題
△
◎
m
a
g
l
a
b
.
j
p
MAGLAB Inc. Allrights reserved.
36
アンケート
https://bit.ly/maglab0928
希望者に無料ご相談会を開催します
ので、アンケートにご協力お願いし
ます。
contact@maglab.jp
https://fb.me/Masahiro.takechi