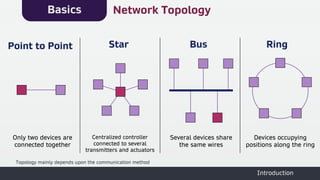
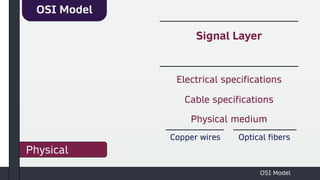
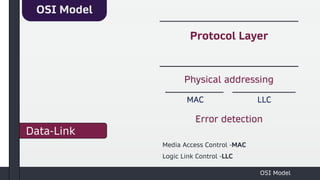
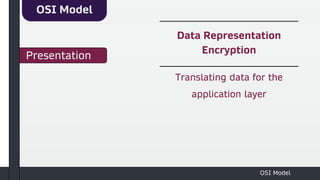
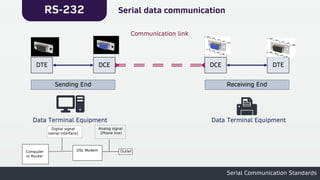
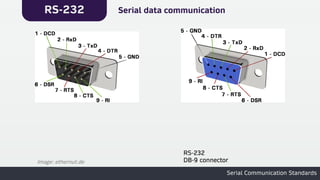
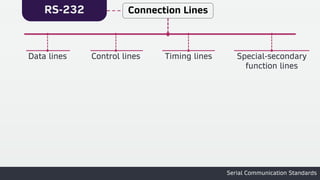
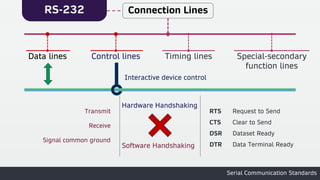
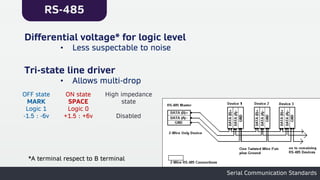
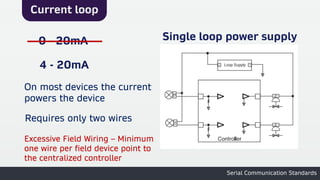
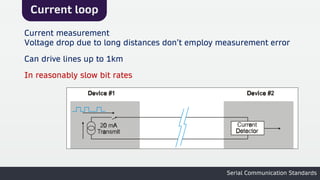
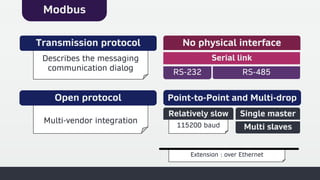
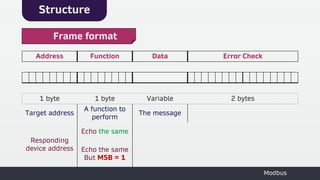
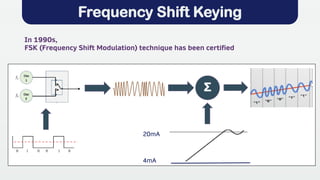
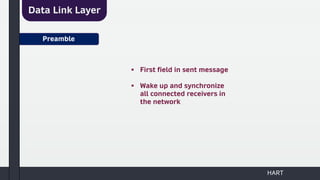
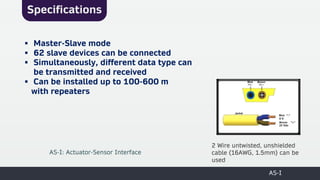
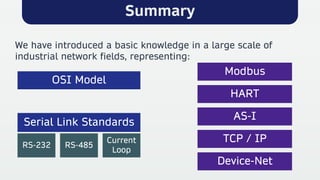
This document provides an overview of industrial communication standards and protocols. It discusses basics such as network topologies and communication modes. The OSI model is explained along with several serial communication standards including RS-232, RS-485, and current loop. Industrial protocols such as Modbus, HART, AS-I, and DeviceNet are described including their specifications, layers, frame formats, and benefits.