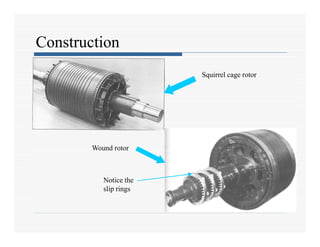
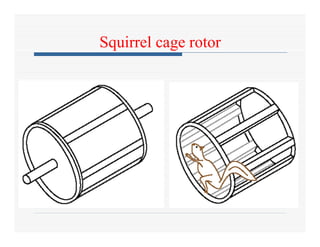
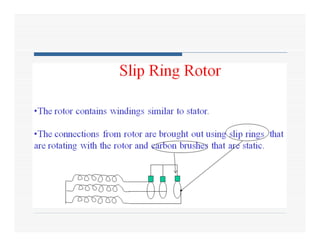
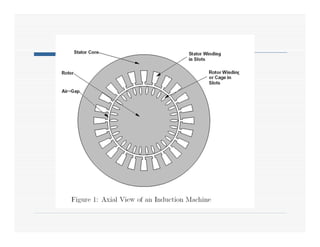
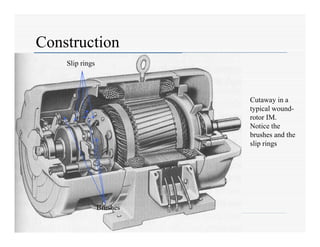
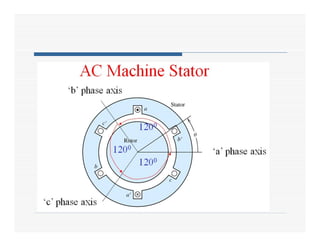
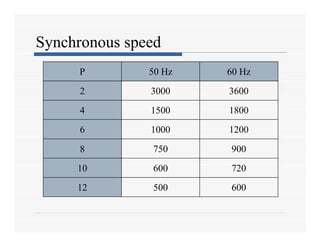
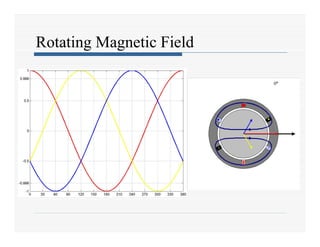
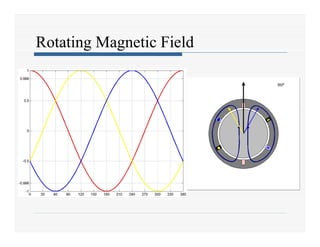
The document provides a detailed overview of three-phase induction motors, highlighting their construction, operation, and speed characteristics. It explains the components such as the stator and rotor, differentiating between squirrel-cage and wound-rotor designs, and discusses the principle of operation involving induced voltage and torque. Additionally, it describes the concept of slip, the relationship between rotor speed and synchronous speed, and compares induction motors with transformers in terms of induced voltage functionality.