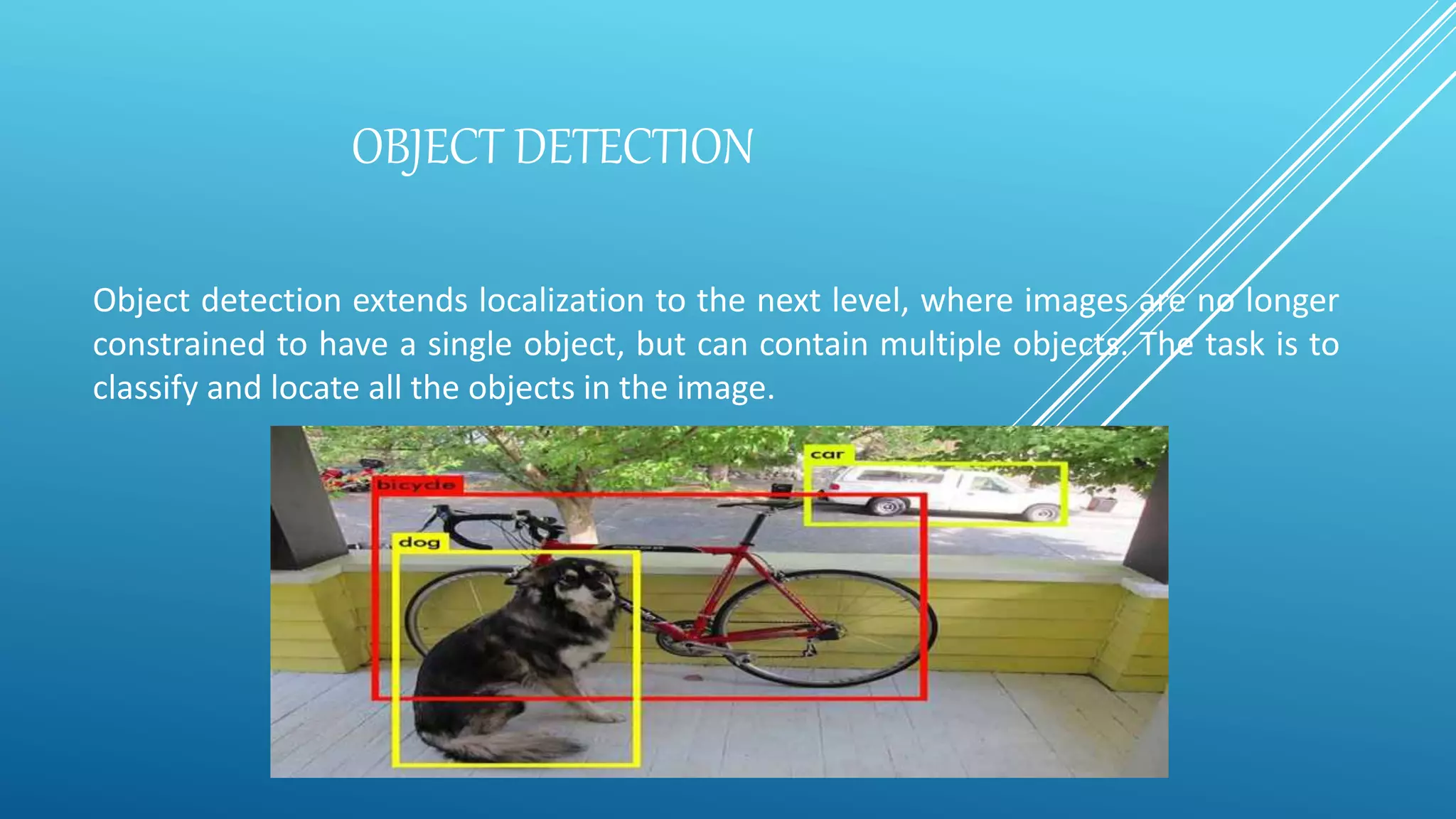
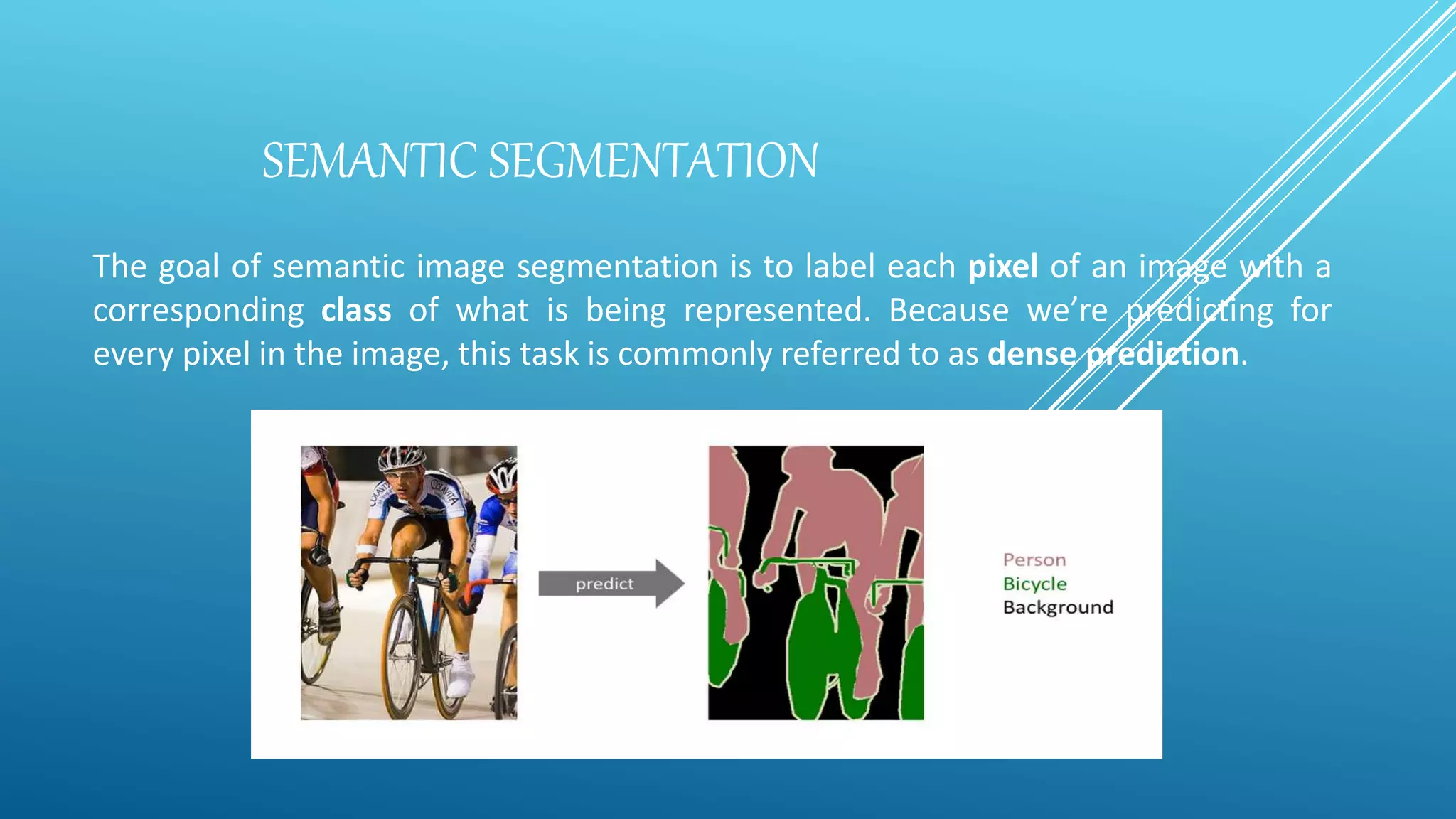
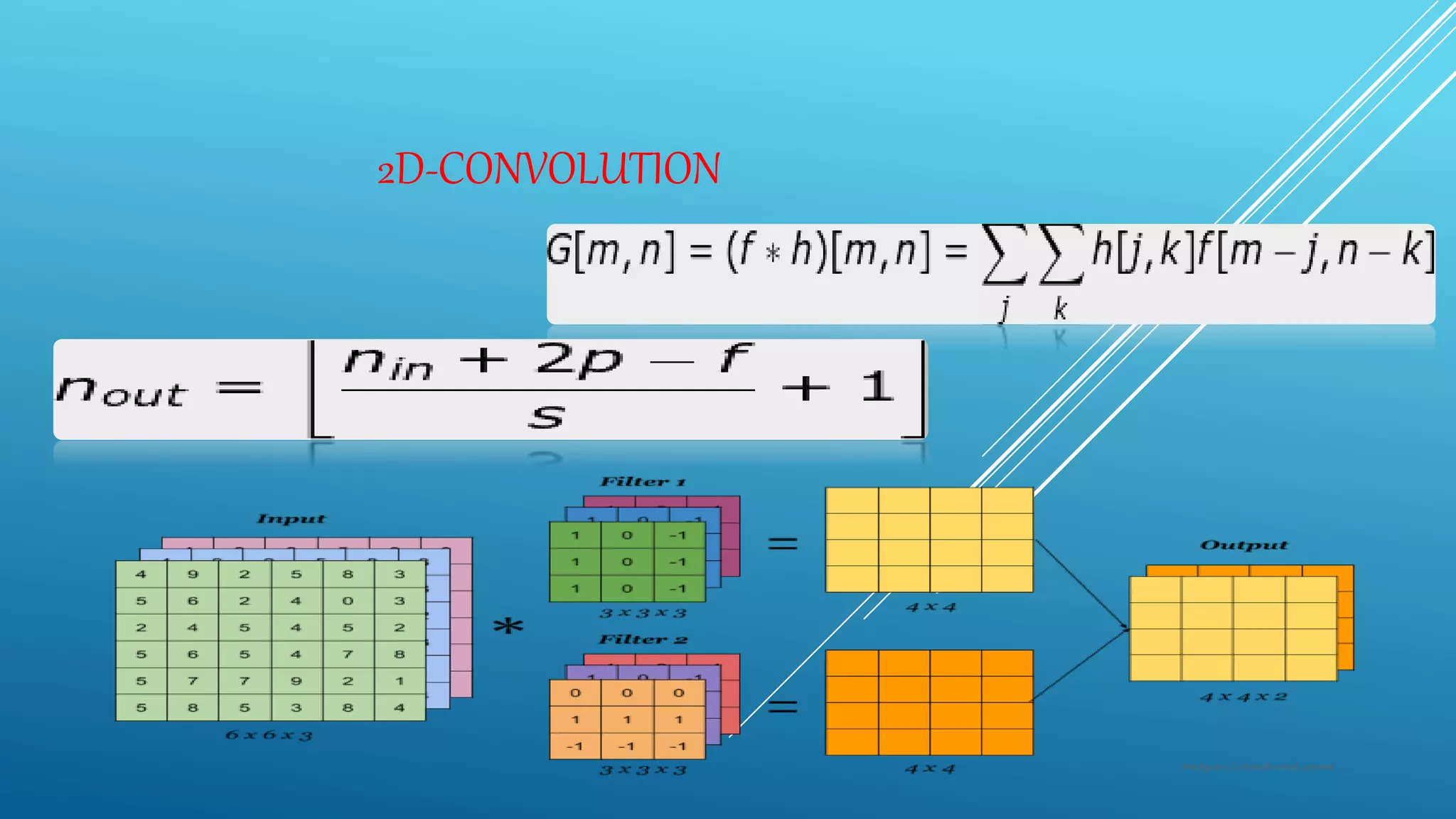
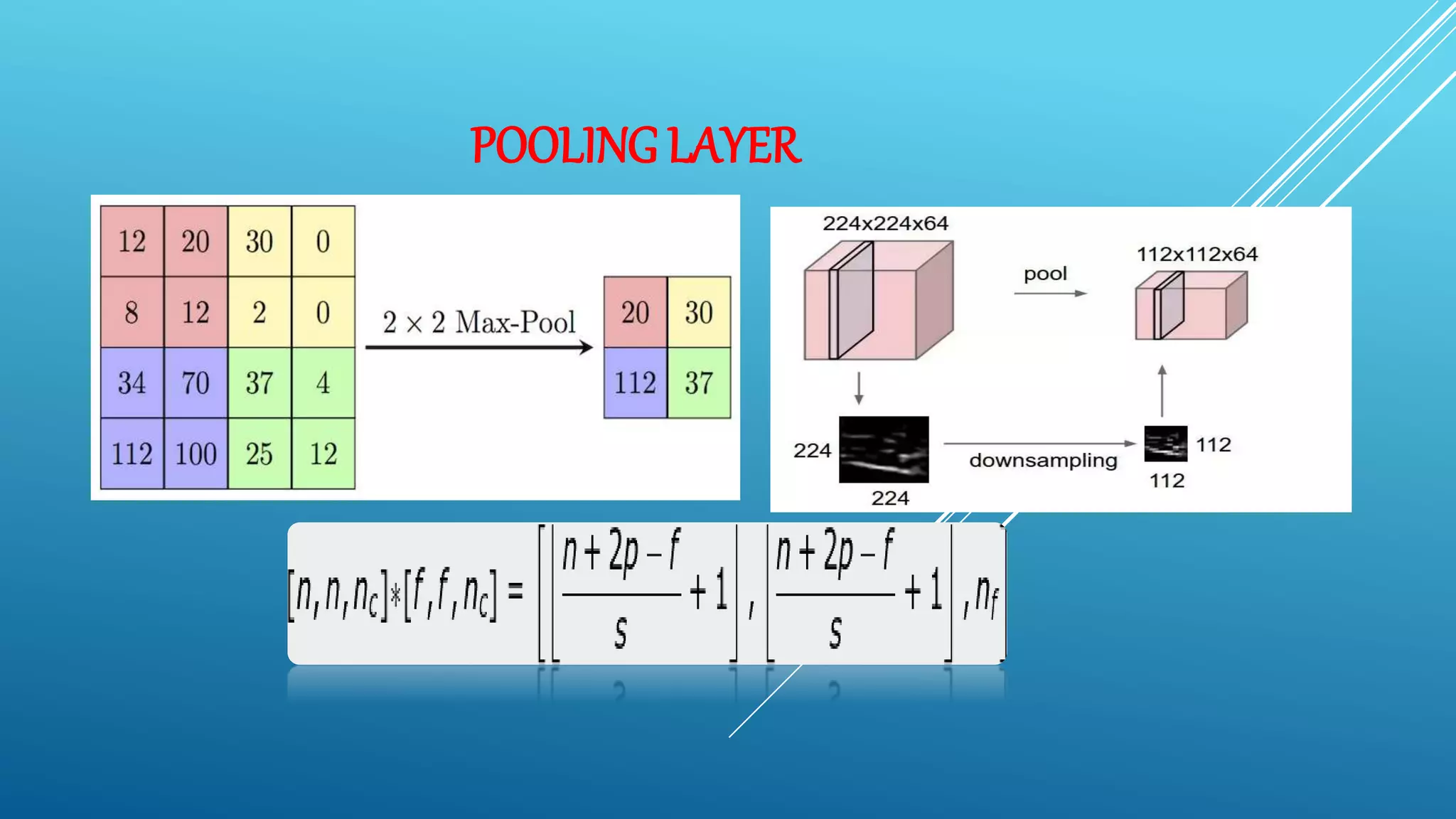
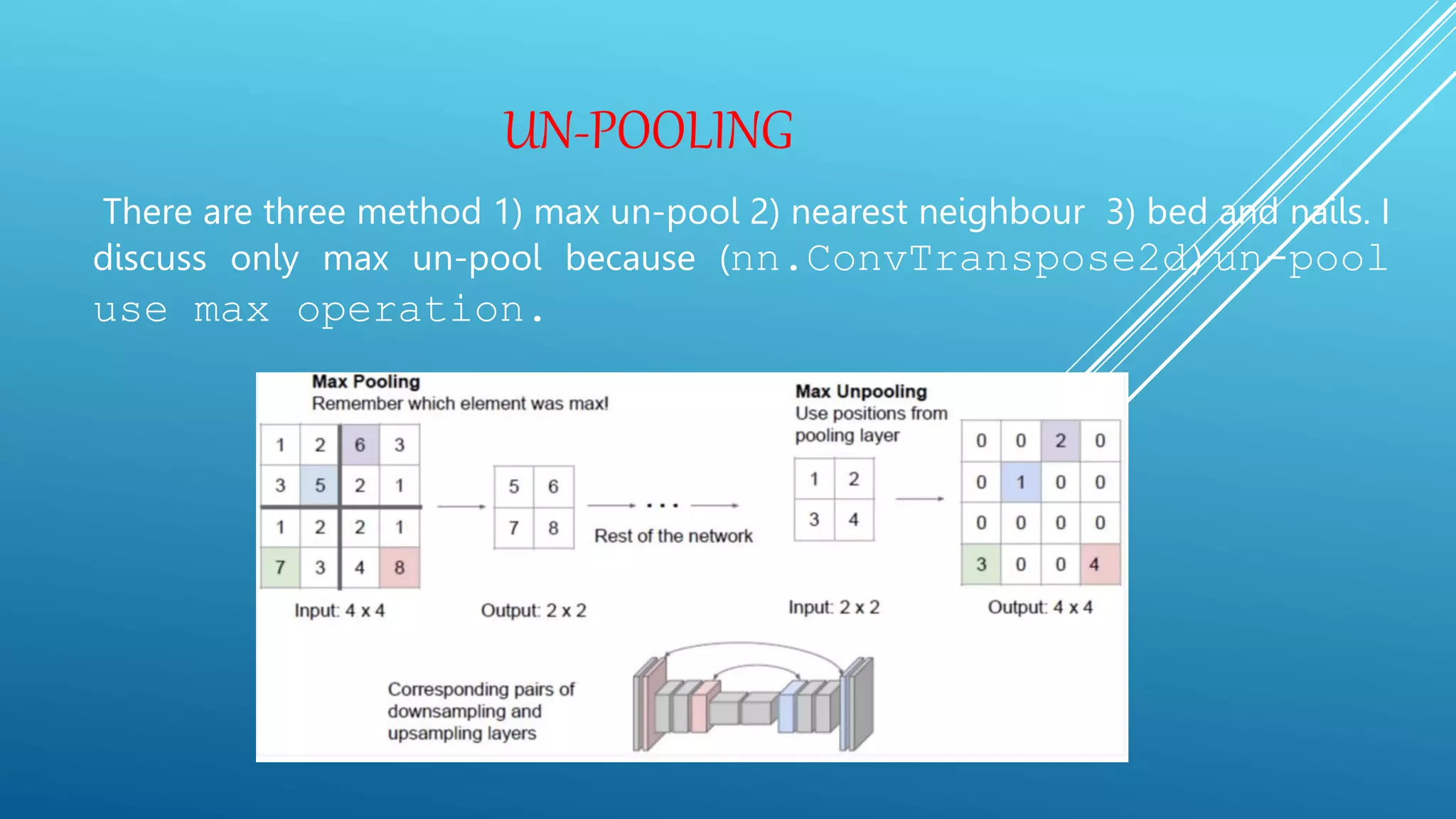
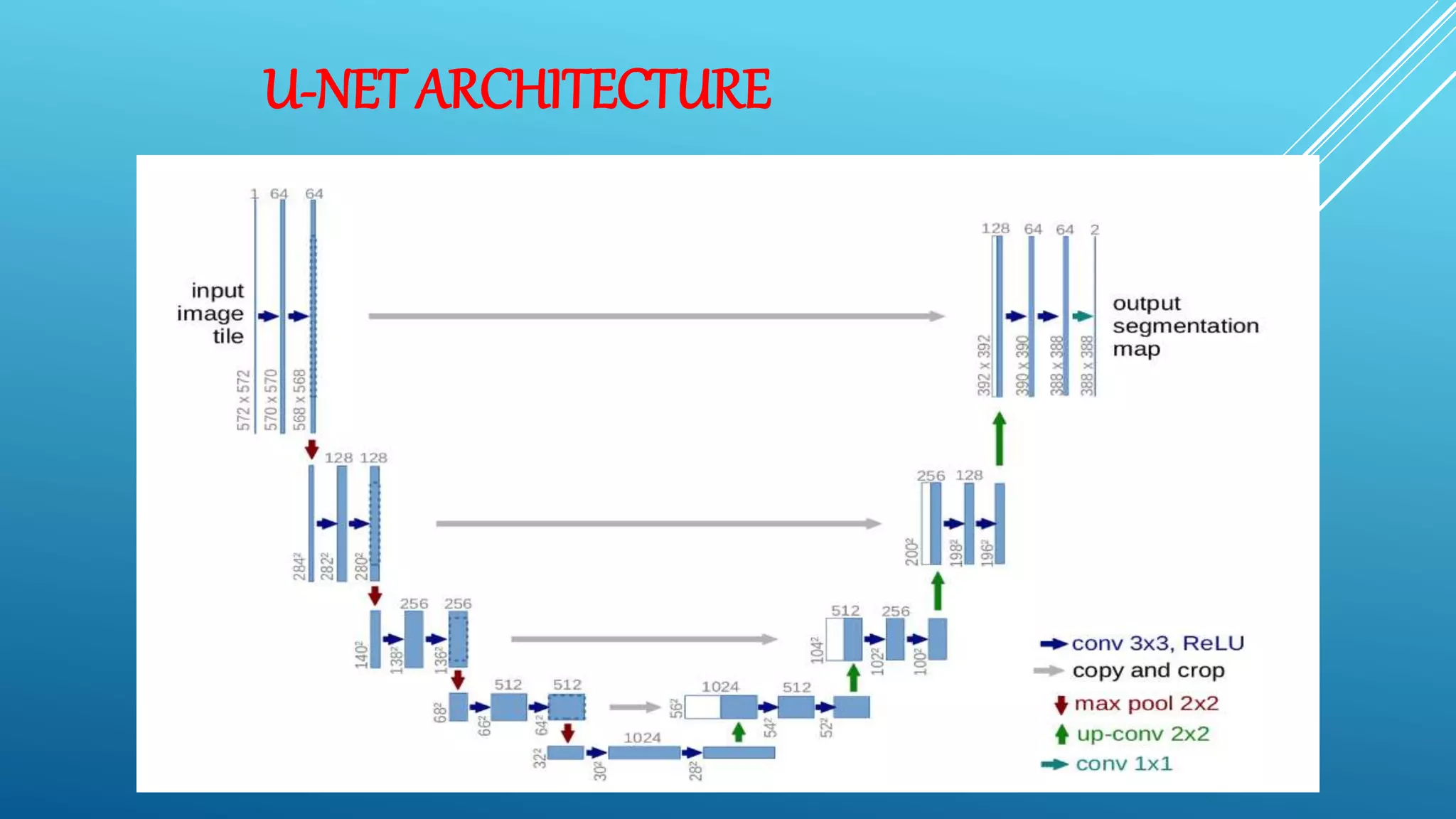
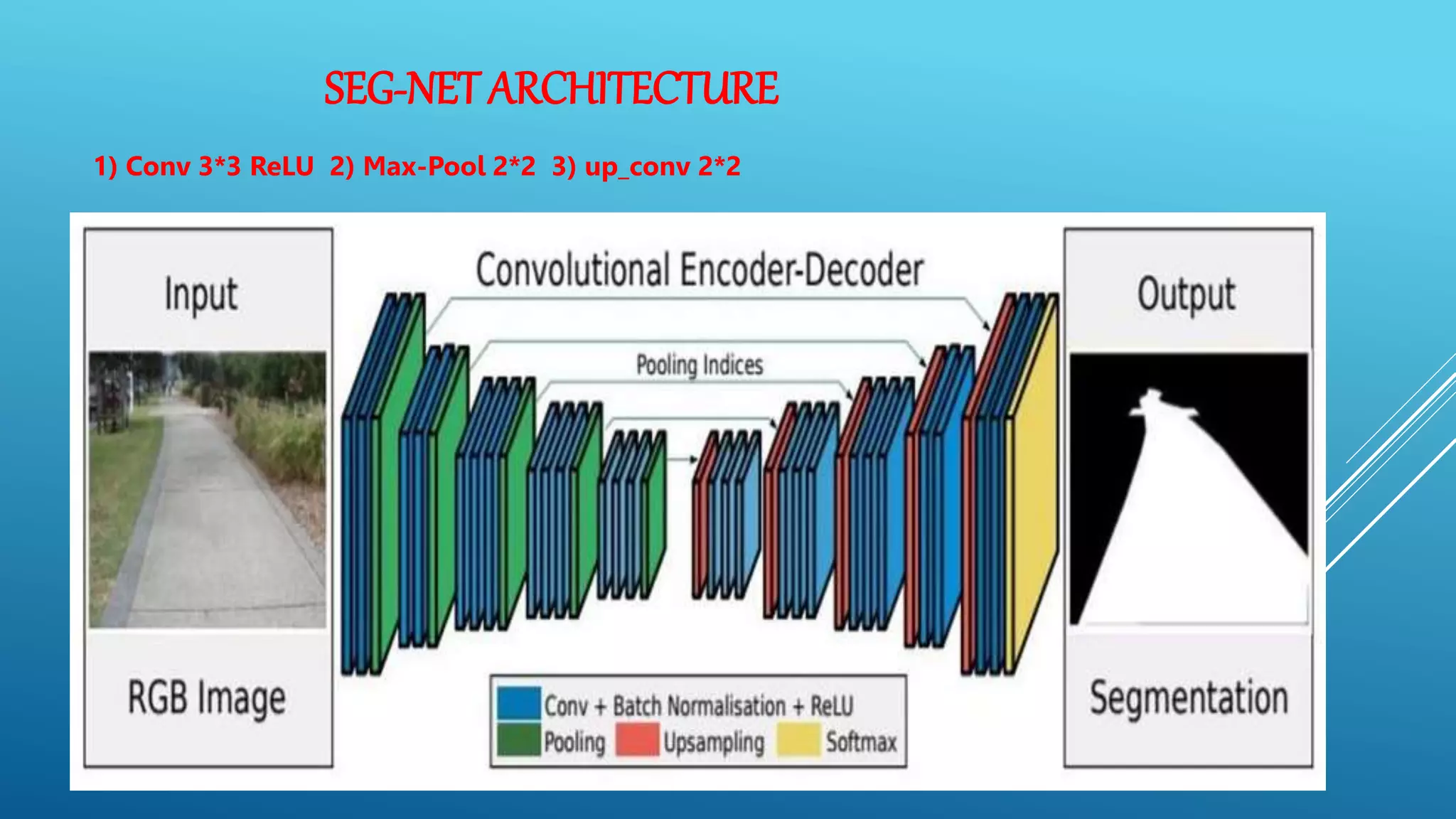
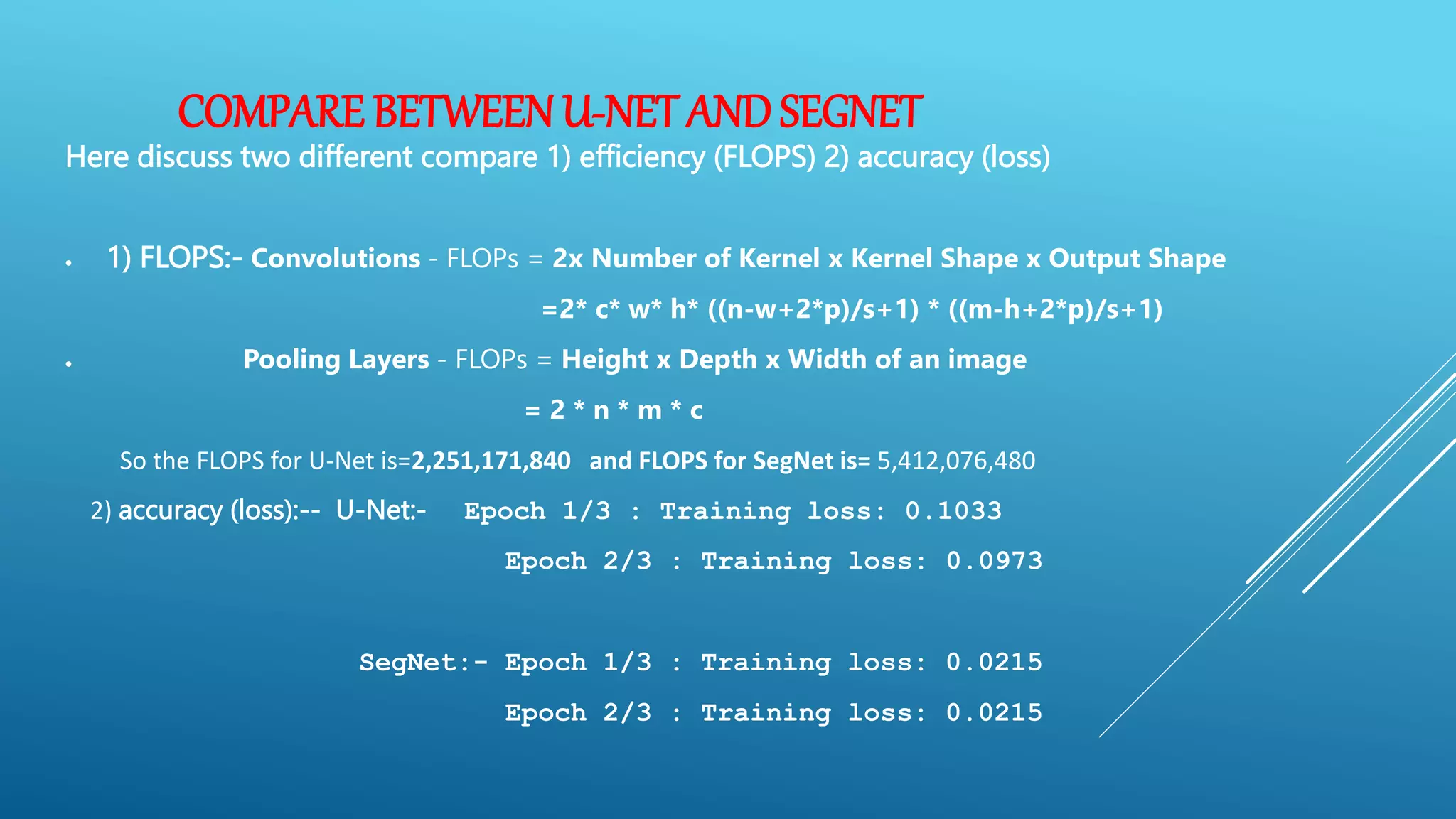
This document discusses image segmentation using U-Net. It begins with an introduction to image segmentation and its goal of partitioning images based on semantic objects. It then explains semantic segmentation which labels each pixel of an image. Various neural network architectures for segmentation are described, including U-Net and SegNet. U-Net uses convolutions and max-unpooling while SegNet uses convolutions and pooling/unpooling. The document compares the computational efficiency and accuracy of U-Net and SegNet on segmentation tasks, finding that U-Net has better accuracy with fewer computations. It concludes that the U-Net architecture remains highly influential for solving complex problems in deep learning segmentation.





















![[DSC Croatia 22] U-Net is all you need - Mladen Fernezir](https://cdn.slidesharecdn.com/ss_thumbnails/fernezirunet-220608091210-777300d8-thumbnail.jpg?width=640&height=640&fit=bounds)




![[DSC Europe 25] Boris Perkovic - Lost in performance.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/uq5hrp7vsuahqkxzifux-1-251204082258-fd2ee09d-thumbnail.jpg?width=640&height=640&fit=bounds)











![[DSC Europe 25] Petar Zivanov - AI meets documents From chatbots to AI-powere...](https://cdn.slidesharecdn.com/ss_thumbnails/xer2bb6nrdc8pdpev0pc-8-251204082258-7c2fa4a1-thumbnail.jpg?width=640&height=640&fit=bounds)





![[DSC Europe 25] Marija Vlajkovic & Andrea Radonjanin - Integration of AI tool...](https://cdn.slidesharecdn.com/ss_thumbnails/qf1jrglttoc3bm8s3aop-final-integration-of-ai-tools-251208151905-394f3a6a-thumbnail.jpg?width=640&height=640&fit=bounds)