Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Hidehito Gomi
5,786 views
Idcon gomi-052715-pub
FIDO overview (in Japanese) presented at idcon vol.20 (2015/5/27)
Technology
◦
Read more
16
Save
Share
Embed
Embed presentation
1
/ 37
2
/ 37
3
/ 37
4
/ 37
5
/ 37
6
/ 37
7
/ 37
8
/ 37
9
/ 37
10
/ 37
11
/ 37
12
/ 37
13
/ 37
14
/ 37
15
/ 37
16
/ 37
17
/ 37
18
/ 37
19
/ 37
20
/ 37
21
/ 37
22
/ 37
23
/ 37
24
/ 37
25
/ 37
26
/ 37
27
/ 37
28
/ 37
29
/ 37
30
/ 37
31
/ 37
32
/ 37
33
/ 37
34
/ 37
35
/ 37
36
/ 37
37
/ 37
More Related Content
PPTX
20150723 最近の興味動向 fido編
by
Tatsuya (達也) Katsuhara (勝原)
PDF
Tokbind-fido
by
Kaoru Maeda
PDF
Microsoftの認証システムの歴史と 過渡期におけるWAPの活用 +Next Generation Credentials
by
Naohiro Fujie
PDF
Azure ADとWindows 10によるドメイン環境の拡張
by
Naohiro Fujie
PDF
FIDO認証によるパスワードレスログイン実装入門
by
Yahoo!デベロッパーネットワーク
PDF
FIDO in Windows10
by
Naohiro Fujie
PDF
Fido self issued
by
HiroshiUeno15
PDF
Iddance2 fido
by
HiroshiUeno15
20150723 最近の興味動向 fido編
by
Tatsuya (達也) Katsuhara (勝原)
Tokbind-fido
by
Kaoru Maeda
Microsoftの認証システムの歴史と 過渡期におけるWAPの活用 +Next Generation Credentials
by
Naohiro Fujie
Azure ADとWindows 10によるドメイン環境の拡張
by
Naohiro Fujie
FIDO認証によるパスワードレスログイン実装入門
by
Yahoo!デベロッパーネットワーク
FIDO in Windows10
by
Naohiro Fujie
Fido self issued
by
HiroshiUeno15
Iddance2 fido
by
HiroshiUeno15
What's hot
PDF
Modern Authentication -- FIDO2 Web Authentication (WebAuthn) を学ぶ --
by
Jun Kurihara
PDF
Advancement of FIDO Technology
by
FIDO Alliance
PDF
FIDOのキホン
by
Yahoo!デベロッパーネットワーク
PPTX
アイデンティティ管理の基礎~Fim adfsアーキテクチャ
by
Naohiro Fujie
PDF
#jics2014 そろそろ「社員IDでログインできます」 始めてみませんか? サービス・プロバイダーの立場から考える 「エンタープライズ・アイデンテ...
by
Tatsuo Kudo
PDF
[SC15] Windows Hello で実現するハイブリッド 生体認証
by
de:code 2017
PDF
OpenID ConnectとAndroidアプリのログインサイクル
by
Masaru Kurahayashi
PDF
認証技術、デジタルアイデンティティ技術の最新動向
by
Tatsuo Kudo
PDF
THE日本のID管理(ID&IT Management Conference 2013)
by
Naohiro Fujie
PDF
プロトコルから見るID連携
by
Naohiro Fujie
PDF
OpenID Connect Summit Transfer of Information
by
Tatsuya (達也) Katsuhara (勝原)
PDF
金融向けoへの認証の導入
by
FIDO Alliance
PDF
Azure ADと外部アプリのID連携/SSO - Deep Dive
by
Naohiro Fujie
PDF
実装して理解するLINE LoginとOpenID Connect入門
by
Naohiro Fujie
PPTX
OpenID ConnectとSCIMのエンタープライズ利用ガイドライン
by
Takashi Yahata
PPTX
OpenID ConnectとSCIMによるエンタープライズでのID連携活用に向けて
by
Takashi Yahata
PDF
安全な"○○でログイン"の作り方 @ NDS in Niigata #1
by
Ryo Ito
PDF
YAPC::Tokyo 2013 ritou OpenID Connect
by
Ryo Ito
PDF
OpenID Connect 入門 〜コンシューマーにおけるID連携のトレンド〜
by
Masaru Kurahayashi
PDF
クラウド時代の「ID管理」と「認証セキュリティ」
by
Tatsuya (達也) Katsuhara (勝原)
Modern Authentication -- FIDO2 Web Authentication (WebAuthn) を学ぶ --
by
Jun Kurihara
Advancement of FIDO Technology
by
FIDO Alliance
FIDOのキホン
by
Yahoo!デベロッパーネットワーク
アイデンティティ管理の基礎~Fim adfsアーキテクチャ
by
Naohiro Fujie
#jics2014 そろそろ「社員IDでログインできます」 始めてみませんか? サービス・プロバイダーの立場から考える 「エンタープライズ・アイデンテ...
by
Tatsuo Kudo
[SC15] Windows Hello で実現するハイブリッド 生体認証
by
de:code 2017
OpenID ConnectとAndroidアプリのログインサイクル
by
Masaru Kurahayashi
認証技術、デジタルアイデンティティ技術の最新動向
by
Tatsuo Kudo
THE日本のID管理(ID&IT Management Conference 2013)
by
Naohiro Fujie
プロトコルから見るID連携
by
Naohiro Fujie
OpenID Connect Summit Transfer of Information
by
Tatsuya (達也) Katsuhara (勝原)
金融向けoへの認証の導入
by
FIDO Alliance
Azure ADと外部アプリのID連携/SSO - Deep Dive
by
Naohiro Fujie
実装して理解するLINE LoginとOpenID Connect入門
by
Naohiro Fujie
OpenID ConnectとSCIMのエンタープライズ利用ガイドライン
by
Takashi Yahata
OpenID ConnectとSCIMによるエンタープライズでのID連携活用に向けて
by
Takashi Yahata
安全な"○○でログイン"の作り方 @ NDS in Niigata #1
by
Ryo Ito
YAPC::Tokyo 2013 ritou OpenID Connect
by
Ryo Ito
OpenID Connect 入門 〜コンシューマーにおけるID連携のトレンド〜
by
Masaru Kurahayashi
クラウド時代の「ID管理」と「認証セキュリティ」
by
Tatsuya (達也) Katsuhara (勝原)
Viewers also liked
PDF
エンタープライズの視点からFIDOとFederationのビジネスを考える
by
Masaru Kurahayashi
PDF
FIDO Alliance Activity in Japan
by
FIDO Alliance
PPTX
NTT Docomo Deployment Case Study: Your Security, More Simple
by
FIDO Alliance
PPTX
New FIDO Specifications Overview -FIDO Alliance -Tokyo Seminar -Nadalin
by
FIDO Alliance
PDF
しょぼいプレゼンをパワポのせいにするな! by @jessedee
by
「MakeLeaps」請求書の作成、管理、郵送
KEY
ノンデザイナーのための配色理論
by
tsukasa obara
PPT
色彩センスのいらない配色講座
by
Mariko Yamaguchi
PDF
見やすいプレゼン資料の作り方 - リニューアル増量版
by
MOCKS | Yuta Morishige
PPT
TwitterのBasic認証が今度こそ終わります
by
Daisuke Nikura
PDF
Androidの表示レイヤーと画面常駐型アプリの話
by
kirimin
PPTX
Introduction to FIDO Alliance
by
FIDO Alliance
PDF
指紋認証と「FIDO」について
by
Device WebAPI Consortium
PPTX
CIS 2014: Azure Active Directory (Sean Deuby)
by
CloudIDSummit
PDF
歴史から学ぶID 〜日本書紀から番号制度まで〜
by
Masanori Kusunoki
PDF
OSC 2011 Tokyo/Spring OpenStackプレゼン
by
Masanori Itoh
PDF
WebIntents × SNS
by
Ryo Ito
PDF
iTree Company Profile
by
rohanspatil
PDF
#idcon 15th ritou 2factor auth
by
Ryo Ito
PPT
O Auth
by
Taizo Matsuoka
PDF
Bitcoinの概要と論点
by
Masanori Kusunoki
エンタープライズの視点からFIDOとFederationのビジネスを考える
by
Masaru Kurahayashi
FIDO Alliance Activity in Japan
by
FIDO Alliance
NTT Docomo Deployment Case Study: Your Security, More Simple
by
FIDO Alliance
New FIDO Specifications Overview -FIDO Alliance -Tokyo Seminar -Nadalin
by
FIDO Alliance
しょぼいプレゼンをパワポのせいにするな! by @jessedee
by
「MakeLeaps」請求書の作成、管理、郵送
ノンデザイナーのための配色理論
by
tsukasa obara
色彩センスのいらない配色講座
by
Mariko Yamaguchi
見やすいプレゼン資料の作り方 - リニューアル増量版
by
MOCKS | Yuta Morishige
TwitterのBasic認証が今度こそ終わります
by
Daisuke Nikura
Androidの表示レイヤーと画面常駐型アプリの話
by
kirimin
Introduction to FIDO Alliance
by
FIDO Alliance
指紋認証と「FIDO」について
by
Device WebAPI Consortium
CIS 2014: Azure Active Directory (Sean Deuby)
by
CloudIDSummit
歴史から学ぶID 〜日本書紀から番号制度まで〜
by
Masanori Kusunoki
OSC 2011 Tokyo/Spring OpenStackプレゼン
by
Masanori Itoh
WebIntents × SNS
by
Ryo Ito
iTree Company Profile
by
rohanspatil
#idcon 15th ritou 2factor auth
by
Ryo Ito
O Auth
by
Taizo Matsuoka
Bitcoinの概要と論点
by
Masanori Kusunoki
Similar to Idcon gomi-052715-pub
PDF
20200303 ISR プライベートセミナー:パスワードのいらない世界へ
by
FIDO Alliance
PDF
FIDO2 ~ パスワードのいらない世界へ
by
FIDO Alliance
PDF
20190704 パスワードに代わる新たなオンライン認証を推進するFIDO(ファイド)アライアンスの記者説明会
by
FIDO Alliance
PDF
FIDO2によるパスワードレス認証が導く新しい認証の世界
by
Kazuhito Shibata
PDF
Nii open forum_053019_dr.gomi
by
FIDO Alliance
PDF
パスワードのいらない世界へ FIDO認証の最新状況
by
FIDO Alliance
PDF
Tokyo press 2019 slides presentations
by
FIDO Alliance
PDF
新しい認証技術FIDOの最新動向
by
FIDO Alliance
PDF
2019 FIDO Tokyo Seminar - パスワードレス認証の実現に向けた 日本におけるFIDO展開の最新状況
by
FIDO Alliance
PDF
Fido認証概要説明
by
FIDO Alliance
PDF
2020 0218 - パスワードのいらない世界へ:FIDOアライアンスとFIDO認証の最新状況
by
FIDO Alliance
PDF
Security days 2015
by
Manabu Kondo
PDF
パスワードのいらない世界へ
by
Keiko Itakura
PDF
ID管理/認証システム導入の理想と現実
by
Naohiro Fujie
PPTX
YJTC18 D-1 安心安全な次世代認証を目指して 〜社会に溶け込む認証技術〜
by
Yahoo!デベロッパーネットワーク
PDF
Bonfire API #1 生体認証のAPI化
by
Yahoo!デベロッパーネットワーク
PDF
FIDO Alliance Osaka Seminar: Welcome Slides.pdf
by
FIDO Alliance
PDF
FIDO認証で「あんしんをもっと便利に」
by
LINE Corporation
PDF
ID Management
by
Kohei MATSUOKA
PDF
富士通によるFIDOソリューションの展開について
by
FIDO Alliance
20200303 ISR プライベートセミナー:パスワードのいらない世界へ
by
FIDO Alliance
FIDO2 ~ パスワードのいらない世界へ
by
FIDO Alliance
20190704 パスワードに代わる新たなオンライン認証を推進するFIDO(ファイド)アライアンスの記者説明会
by
FIDO Alliance
FIDO2によるパスワードレス認証が導く新しい認証の世界
by
Kazuhito Shibata
Nii open forum_053019_dr.gomi
by
FIDO Alliance
パスワードのいらない世界へ FIDO認証の最新状況
by
FIDO Alliance
Tokyo press 2019 slides presentations
by
FIDO Alliance
新しい認証技術FIDOの最新動向
by
FIDO Alliance
2019 FIDO Tokyo Seminar - パスワードレス認証の実現に向けた 日本におけるFIDO展開の最新状況
by
FIDO Alliance
Fido認証概要説明
by
FIDO Alliance
2020 0218 - パスワードのいらない世界へ:FIDOアライアンスとFIDO認証の最新状況
by
FIDO Alliance
Security days 2015
by
Manabu Kondo
パスワードのいらない世界へ
by
Keiko Itakura
ID管理/認証システム導入の理想と現実
by
Naohiro Fujie
YJTC18 D-1 安心安全な次世代認証を目指して 〜社会に溶け込む認証技術〜
by
Yahoo!デベロッパーネットワーク
Bonfire API #1 生体認証のAPI化
by
Yahoo!デベロッパーネットワーク
FIDO Alliance Osaka Seminar: Welcome Slides.pdf
by
FIDO Alliance
FIDO認証で「あんしんをもっと便利に」
by
LINE Corporation
ID Management
by
Kohei MATSUOKA
富士通によるFIDOソリューションの展開について
by
FIDO Alliance
Recently uploaded
PDF
自転車ユーザ参加型路面画像センシングによる点字ブロック検出における性能向上方法の模索 (20260123 SeMI研)
by
Yuto Matsuda
PDF
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
by
akipii ogaoga
PDF
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
by
akipii ogaoga
PDF
maisugimoto_曖昧さを含む仕様書の改善を目的としたアノテーション支援ツールの検討_HCI2025.pdf
by
Matsushita Laboratory
PDF
TomokaEdakawa_職種と講義の関係推定に基づく履修支援システムの基礎検討_HCI2026
by
Matsushita Laboratory
PDF
20260119_VIoTLT_vol22_kitazaki_v1___.pdf
by
Ayachika Kitazaki
自転車ユーザ参加型路面画像センシングによる点字ブロック検出における性能向上方法の模索 (20260123 SeMI研)
by
Yuto Matsuda
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
by
akipii ogaoga
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
by
akipii ogaoga
maisugimoto_曖昧さを含む仕様書の改善を目的としたアノテーション支援ツールの検討_HCI2025.pdf
by
Matsushita Laboratory
TomokaEdakawa_職種と講義の関係推定に基づく履修支援システムの基礎検討_HCI2026
by
Matsushita Laboratory
20260119_VIoTLT_vol22_kitazaki_v1___.pdf
by
Ayachika Kitazaki
Idcon gomi-052715-pub
1.
1 Yahoo! JAPANの FIDOへの取り組み ヤフー株式会社 Yahoo! JAPAN
研究所 上席研究員 五味 秀仁 #idcon vol.20 ∼またの名を #fidcon (FIDO特集)(2015年5月27日)
2.
2 パスワードの課題
3.
3 パスワードの課題 n 再利用可能(bearer tokenだから) →
漏えいすると使われてしまう n 長いパスワードは覚えられない、入力が不便 → 人の記憶に頼るのは難しい 上記課題に対する解決策の1つが FIDO である
4.
4 FIDO概要
5.
5 FIDO Allianceの概要 n FIDO
(Fast IDentity Online): • オンライン認証時のセキュアな通信仕様の策定や推進を目的とした非営利団体。 n 設立経緯: • 2012年7月:Nok Nok Labs、PayPalらの6社で設立。 • 2014年4月:Yahoo! JAPAN 加盟 • 2015年5月現在:約200団体加盟中 n 役割 • 技術仕様の策定 → 標準化団体への提出、(正式な) 標準化へ - アライアンス自体は製品は出さない。メンバー企業ごとに実装。 • 適合性テストの実施 → 各社製品に対して認定 (FIDO-Certified/FIDO-Ready) - 商標ライセンスの登録、認定ロゴの配布 • オピニオンリーダー、エコシステムの構築牽引
6.
6 メンバー企業 以下のページをご参照ください。 https://fidoalliance.org/membership/members/
7.
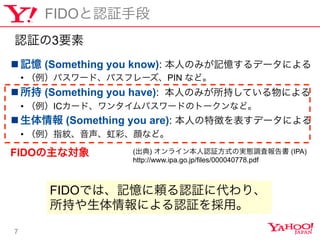
7 FIDOと認証手段 n 記憶 (Something you
know): 本人のみが記憶するデータによる • (例)パスワード、パスフレーズ、PIN など。 n 所持 (Something you have): 本人のみが所持している物による • (例)ICカード、ワンタイムパスワードのトークンなど。 n 生体情報 (Something you are): 本人の特徴を表すデータによる • (例)指紋、音声、虹彩、顔など。 (出典) オンライン本人認証方式の実態調査報告書 (IPA) http://www.ipa.go.jp/files/000040778.pdf FIDOの主な対象 認証の3要素 FIDOでは、記憶に頼る認証に代わり、 所持や生体情報による認証を採用。
8.
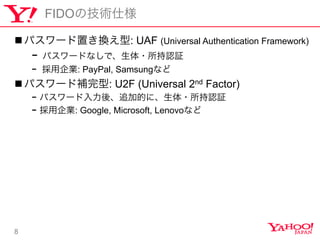
8 FIDOの技術仕様 n パスワード置き換え型: UAF (Universal
Authentication Framework) - パスワードなしで、生体・所持認証 - 採用企業: PayPal, Samsungなど n パスワード補完型: U2F (Universal 2nd Factor) - パスワード入力後、追加的に、生体・所持認証 - 採用企業: Google, Microsoft, Lenovoなど
9.
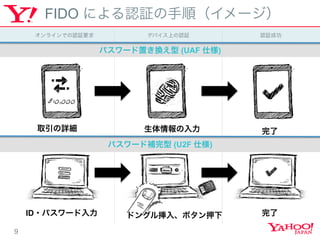
9 FIDO による認証の手順(イメージ) デバイス上の認証 認証成功オンラインでの認証要求 パスワード置き換え型
(UAF 仕様) パスワード補完型 (U2F 仕様) 生体情報の入力取引の詳細 完了 ID・パスワード入力 ドングル挿入、ボタン押下 完了
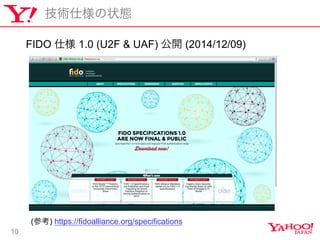
10.
10 技術仕様の状態 FIDO 仕様 1.0
(U2F & UAF) 公開 (2014/12/09) (参考) https://fidoalliance.org/specifications
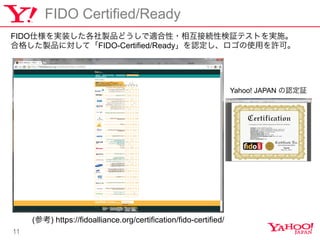
11.
11 FIDO Certified/Ready FIDO仕様を実装した各社製品どうしで適合性・相互接続性検証テストを実施。 合格した製品に対して「FIDO-Certified/Ready」を認定し、ロゴの使用を許可。 (参考) https://fidoalliance.org/certification/fido-certified/ Yahoo!
JAPAN の認定証
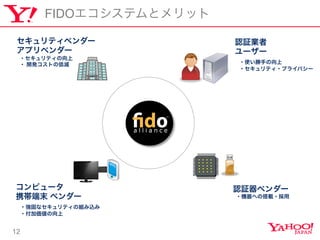
12.
12 FIDOエコシステムとメリット 認証業者 ユーザー ・使い勝手の向上 ・セキュリティ・プライバシー 認証器ベンダー ・機器への搭載・採用 セキュリティベンダー アプリベンダー ・セキュリティの向上 ・ 開発コストの低減 コンピュータ 携帯端末 ベンダー ・強固なセキュリティの組み込み ・付加価値の向上
13.
13 FIDO Architecture
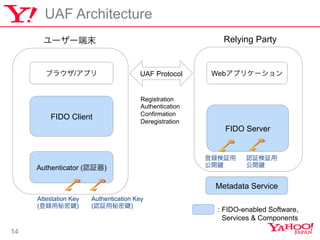
14.
14 UAF Architecture Authenticator (認証器) ブラウザ/アプリ FIDO
Client ユーザー端末 Webアプリケーション Relying Party FIDO Server UAF Protocol Attestation Key (登録用秘密 ) 登録検証用 公開 Registration Authentication Confirmation Deregistration : FIDO-enabled Software, Services & Components Authentication Key (認証用秘密 ) Metadata Service 認証検証用 公開
15.
15 FIDOの概念 (1) Pluggable authentication
16.
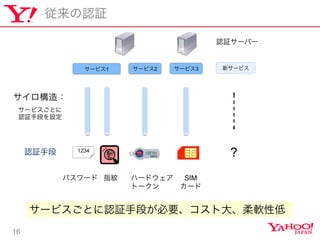
16 従来の認証 認証手段 指紋 SIM カード ? 認証サーバー サービス2サービス1 新サービスサービス3 1234 パスワード
ハードウェア トークン サービスごとに認証手段が必要、コスト大、柔軟性低 サイロ構造: サービスごとに 認証手段を設定
17.
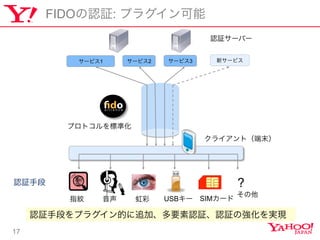
17 FIDOの認証: プラグイン可能 認証手段 認証サーバー サービス2サービス1 新サービスサービス3 プロトコルを標準化 指紋
音声 虹彩 USBキー SIMカード ? その他 認証手段をプラグイン的に追加、多要素認証、認証の強化を実現 クライアント(端末)
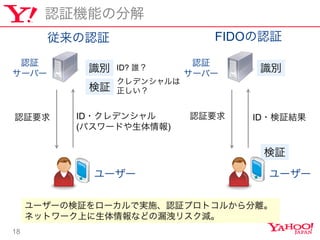
18.
18 認証機能の分解 認証 サーバー ユーザー 従来の認証 識別 検証 認証要求 ID・クレデンシャル (パスワードや生体情報) FIDOの認証 ユーザー 識別 検証 ID・検証結果認証要求 ユーザーの検証をローカルで実施、認証プロトコルから分離。 ネットワーク上に生体情報などの漏洩リスク減。 ID? 誰? クレデンシャルは 正しい? 認証 サーバー
19.
19 FIDOの概念 (2) Trust model
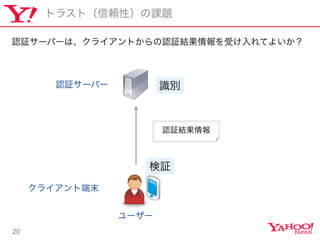
20.
20 トラスト(信頼性)の課題 認証サーバーは、クライアントからの認証結果情報を受け入れてよいか? 認証サーバー ユーザー 識別 検証 クライアント端末 認証結果情報
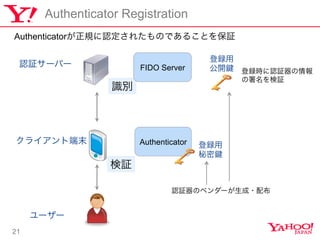
21.
21 Authenticator Registration 認証サーバー ユーザー 識別 検証 クライアント端末 FIDO Server Authenticator
登録用 秘密 登録用 公開 登録時に認証器の情報 の署名を検証 認証器のベンダーが生成・配布 Authenticatorが正規に認定されたものであることを保証
22.
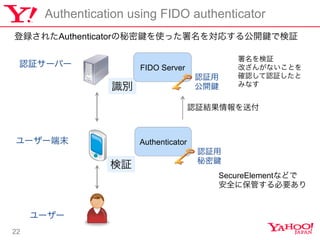
22 Authentication using FIDO
authenticator 認証サーバー ユーザー 識別 検証 ユーザー端末 FIDO Server Authenticator 認証用 秘密 認証用 公開 署名を検証 改ざんがないことを 確認して認証したと みなす 認証結果情報を送付 登録されたAuthenticatorの秘密 を使った署名を対応する公開 で検証 SecureElementなどで 安全に保管する必要あり
23.
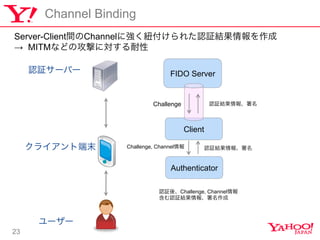
23 Channel Binding 認証サーバー ユーザー クライアント端末 FIDO Server Authenticator Server-Client間のChannelに強く紐付けられた認証結果情報を作成 →
MITMなどの攻撃に対する耐性 Client Challenge Challenge, Channel情報 認証後、Challenge, Channel情報 含む認証結果情報、署名作成 認証結果情報、署名 認証結果情報、署名
24.
24 FIDOの概念 (3) プライバシー
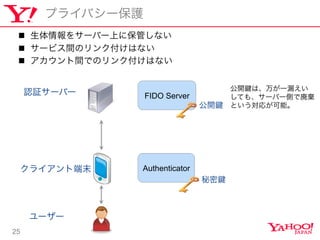
25.
25 プライバシー保護 n 生体情報をサーバー上に保管しない n サービス間のリンク付けはない n
アカウント間でのリンク付けはない 認証サーバー ユーザー クライアント端末 FIDO Server Authenticator 秘密 公開 公開 は、万が一漏えい しても、サーバー側で廃棄 という対応が可能。
26.
26 FIDOとID連携の関係
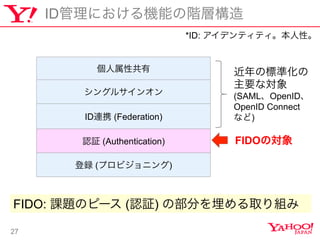
27.
27 認証 (Authentication) ID管理における機能の階層構造 登録 (プロビジョニング) ID連携
(Federation) シングルサインオン 個人属性共有 近年の標準化の 主要な対象 (SAML、OpenID、 OpenID Connect など) 認証 (Authentication) FIDOの対象 FIDO: 課題のピース (認証) の部分を埋める取り組み *ID: アイデンティティ。本人性。
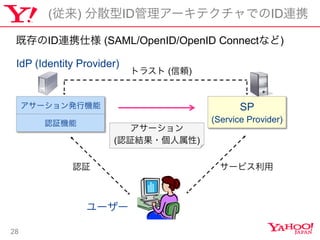
28.
28 (従来) 分散型ID管理アーキテクチャでのID連携 既存のID連携仕様 (SAML/OpenID/OpenID
Connectなど) アサーション (認証結果・個人属性) ユーザー アサーション発行機能 SP (Service Provider) トラスト (信頼) 認証 IdP (Identity Provider) 認証機能 サービス利用
29.
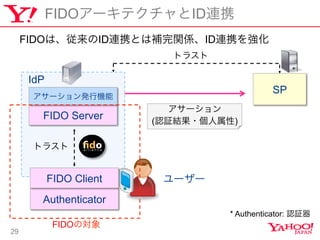
29 FIDOアーキテクチャとID連携 FIDO Server FIDOの対象 IdP SP FIDOは、従来のID連携とは補完関係、ID連携を強化 トラスト アサーション発行機能 Authenticator ユーザー トラスト アサーション (認証結果・個人属性) FIDO Client *
Authenticator: 認証器
30.
30 FIDOの技術仕様 U2F (Universal 2nd
Factor)
31.
31 FIDOの技術仕様 UAF (Universal Authentication
Framework)
32.
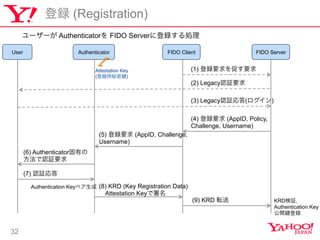
32 登録 (Registration) ユーザーが Authenticatorを
FIDO Serverに登録する処理 FIDO ServerFIDO ClientAuthenticator (1) 登録要求を促す要求 User (2) Legacy認証要求 (3) Legacy認証応答(ログイン) (4) 登録要求 (AppID, Policy, Challenge, Username) (5) 登録要求 (AppID, Challenge, Username) (6) Authenticator固有の 方法で認証要求 (7) 認証応答 (8) KRD (Key Registration Data) Attestation Keyで署名 Attestation Key (登録用秘密 ) (9) KRD 転送 Authentication Keyペア生成 KRD検証, Authentication Key 公開 登録
33.
33 認証要求メッセージ(例) { "header”: { "op":"Reg", "appID":"https://uaf.yahoo.co.jp:8443/SampleApp/", "upv":{"major":1,"minor":0}, "serverData":"75579B4564CB8C33E1B2189052DB8E89” }, "challenge":"3fcea9181e258d928fb81525d77b68671aa97bb3", "username":”gomi", "policy":{ "accepted":[[{ "attestationTypes":[15879], "authenticationAlgorithms":[1], "assertionSchemes":["UAFV1TLV"]}]], "disallowed”:[{ "aaid":"1234#5678"}] } }
34.
34 Key Registration Data
(KRD) 情報 n Hash (Challenge) n AAID (Authenticator Attestation ID) n Public Key n KeyID n Registration Counter n Signature Counter n Signature (Attestation Key)
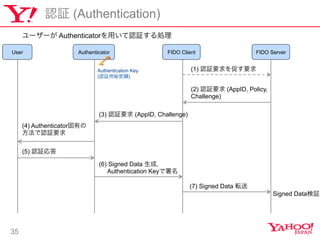
35.
35 認証 (Authentication) ユーザーが Authenticatorを用いて認証する処理 FIDO
ServerFIDO ClientAuthenticator (1) 認証要求を促す要求 User (2) 認証要求 (AppID, Policy, Challenge) (3) 認証要求 (AppID, Challenge) (4) Authenticator固有の 方法で認証要求 (5) 認証応答 (6) Signed Data 生成, Authentication Keyで署名 Authentication Key (認証用秘密 ) (7) Signed Data 転送 Signed Data検証
36.
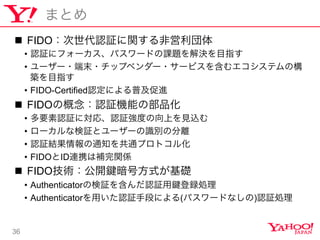
36 まとめ n FIDO:次世代認証に関する非営利団体 • 認証にフォーカス、パスワードの課題を解決を目指す •
ユーザー・端末・チップベンダー・サービスを含むエコシステムの構 築を目指す • FIDO-Certified認定による普及促進 n FIDOの概念:認証機能の部品化 • 多要素認証に対応、認証強度の向上を見込む • ローカルな検証とユーザーの識別の分離 • 認証結果情報の通知を共通プロトコル化 • FIDOとID連携は補完関係 n FIDO技術:公開 暗号方式が基礎 • Authenticatorの検証を含んだ認証用 登録処理 • Authenticatorを用いた認証手段による(パスワードなしの)認証処理
37.
37 ご清聴ありがとうございました コンタクト先: hgomi@yahoo-corp.jp

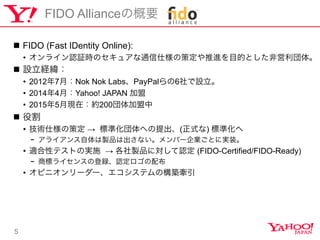




![33
認証要求メッセージ(例)
{
"header”: {
"op":"Reg",
"appID":"https://uaf.yahoo.co.jp:8443/SampleApp/",
"upv":{"major":1,"minor":0},
"serverData":"75579B4564CB8C33E1B2189052DB8E89”
},
"challenge":"3fcea9181e258d928fb81525d77b68671aa97bb3",
"username":”gomi",
"policy":{
"accepted":[[{
"attestationTypes":[15879],
"authenticationAlgorithms":[1],
"assertionSchemes":["UAFV1TLV"]}]],
"disallowed”:[{
"aaid":"1234#5678"}]
}
}](https://image.slidesharecdn.com/idcon-gomi-052715-pub-150529120028-lva1-app6892/85/Idcon-gomi-052715-pub-33-320.jpg)














![[SC15] Windows Hello で実現するハイブリッド 生体認証](https://cdn.slidesharecdn.com/ss_thumbnails/sc15-170614044751-thumbnail.jpg?width=640&height=640&fit=bounds)