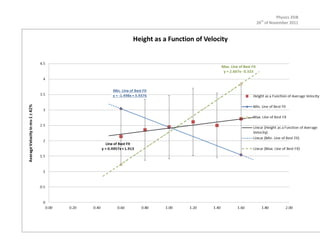
This physics lab experiment was designed to verify Galileo's theory of conservation of energy by measuring the potential and kinetic energy of a falling tennis ball. The ball was dropped from various heights and its time of fall was recorded. Calculations showed the potential energy was about 3 times greater than the kinetic energy, failing to prove conservation of energy. Sources of error included air resistance, imprecise timing of when the ball hit the ground, and too few trials. Improving the experiment could help address these issues and better test the hypothesis.



![Physics 35IB
26th of November 2011
h
The Velocity was calculated using the formula of vave as an example:
s
0.60m m
vave 2.14
0.28s s
Uncertainties:
The Uncertainty of the raw time Data was set at 0.15 s which is equivalent to the reaction time of the
person who stopped the time. As the time was stopped when the ball hit the ground an average
reaction time of 0.15 seconds would need to be added or subtracted. The error of the height of 0.002m
(0.2cm) does not equal the maximum degree of uncertainty of 0.05cm since a perfect determination of
the height was made impossible because of bad shape the used ruler was in.
The uncertainty of average time was attained through the arithmetic mean calculations.
[ greatest value] [mean] ...
Whatever value was the greater residual will be used as uncertainty.
[ smallest value] [mean] ...
0.59s 0.44s 0.15s
As the minus in front can be neglected the value of 0.17 seconds is the greater
0.28s 0.44s 0.17 s
of both of them. Therefore the 0.17 s was used as error when dealing with the average time.
When determining the error of the average velocity one needs to follow through with following steps.
First the Formula of Error Propagation needs to be determined. The average Velocity is attained through
Division of two values with corresponding errors; The formula for Division:
h t m 0.002m 0.17s v 1.33 m
vave vave * ave an example for this: vave 2.14 * ave
h t s 0.6m 0.28s s
To make calculations later on easier the percent Uncertainty is needed.
m
1.33
vave s *100%
%vave *100% ; %vave %vave 0.62%
vave m
2.14
s
Afterwards all of the calculated values for the average velocity percent error are being averaged to a
value of 42%.
Only on the axis with the greater percentage error Error bars are used to indicate the rage of the value.
The average percentage uncertainty of height is 0.20% and the uncertainty of velocity is 42%.
Y-error bars will be used.](https://image.slidesharecdn.com/designlab-120908123012-phpapp01/85/IB-Physics-SL-Design-Lab-4-320.jpg)