More Related Content

PDF
202006 のの会@関数Talk 21st @function-talk-in-notesknows-workshop 
PDF

PDF
202003 functiontalkinnotesknowsworkshop20th 
PDF
魅せる・際立つ・役立つグラフ Hands on!! ggplot2!! ~導入編~ 
PDF

PDF
ラムダでウィザード 滅せよ手続き、とチャーチは言った (※言ってません) 
ODP
Scoped BASIC Presentation1 
PPTX
What's hot

PDF

PDF
オブジェクト指向の皮をかぶった関数型プログラミング言語 Haxe 
PPTX

PDF
2011.7.3 札幌C++勉強会#2「C++のマクロはどこまで関数をいじれるのか」 
PDF

PPTX

PDF
saiはRに宿るか? -RStudioとggplot2で碁を打つ- 
PPTX

PDF

PDF

PDF

PDF

PDF

PPTX

PDF
Viewers also liked

DOCX

PPTX
2. how does your media product represent social groups 
PPTX

PPTX
Dentin -kunal parekh..advancd oral biology 
PPTX

ODP

PPTX

PPTX
Capacitacion antitabaco jefe alex camacho 
PPT
6 Actions To Build Your Dream 
PDF
Hire iPhone App Developers 
PPTX
Innovation and Acceleration through Social Online Collaboration Idea Campaigns 
PDF

DOC

PPT
Hail storms - elementary level 
PPT
Clouds, storms & the bible 
PPTX
Jamie Gorski at Landlord WEBCON 2014 
PDF
Amey mahant's presentation 
PDF

PPSX
Similar to Hokkaido.pm.casual #03 slide

PPTX
Perl Hobby Programming - Games::BeLike::EightBIT ターミナルで8ビット風ゲームをつくろう 
PPTX

PDF

PDF
名古屋Ruby会議01 A3.製造業向け3Dデータ変換ソリューションにおけるRuby活用事例 
PDF
Pythonで画像処理をやってみよう!第2回 - 動く物体の抜き出し - 
PDF

PPTX

PDF
Ruby を用いた超絶技巧プログラミング(夏のプログラミングシンポジウム 2012) 
PPT

PPTX

PPTX

PPTX

PDF

PPTX
実録『すぐわかるPerl』〜社内ツール悲喜こもごも〜 
PDF

PDF

PDF
Python Imaging Libraryの紹介 
PDF
PCD2019 TOKYO ワークショップ「2時間で!Processingでプログラミング入門」 
PDF
openFrameworks Workshop in Kanazawa v001 
PDF
毎秒2000Requestを捌くPerl製CMSの内部構造(Debianサーバ1台にて) Hokkaido.pm.casual #03 slide
- 1.
- 2.
Perl でファイル入出力?
お、やったことあるぞ。
というか、実際そればっかりだし。
しかし、「全部自分で書く派」だから、
皆さんの役に立つかなぁ?
でも、ここを逃したら、「自己紹介」し
かないぞ。
しょうがない。やってまえ。
- 3.
TAB 区切りデータから BMPを作
る
業務でやったこと。
タックシール印刷アプリの関係。
寸法データから、見本用の Thumbnail 画
像を生成する作業。
年2~3回データを更新する都度、実施
する。
タックシールの寸法データは 2000 件を越
えるので、手で描いていたら終わらない
。
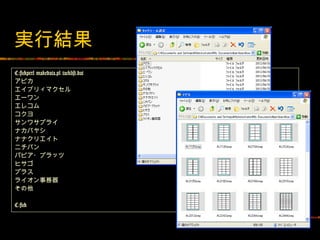
- 4.
- 5.
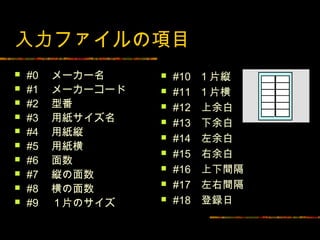
入力ファイルの項目
#0 メーカー名 #10 1 片縦
#1 メーカーコード #11 1 片横
#2 型番 #12 上余白
#3 用紙サイズ名 #13 下余白
#4 用紙縦 #14 左余白
#5 用紙横
#15 右余白
#6 面数
#7 縦の面数
#16 上下間隔
#8 横の面数
#17 左右間隔
#9 1片のサイズ #18 登録日
- 6.
要求仕様
「タックシール設定」フォルダ以下に、
メーカー名のフォルダを作成して、その中に
型番をファイル名とする BMP ファイルを作
成する。
ビットマップは縦 78pixel× 横 98pixel とす
る。
上記のビットマップの中央部分にフィッ
トするように、タックシール用紙の模式
図を描く。
- 7.
出力ファイル
Device-Independent Bitmap
( Windows )
いわゆる .bmp 形式( Windows DIB とも)
24bit Color Depth が単純で使いやすい
先頭 54bytes のヘッダ
データ部分は、 pixel の RGB 値が青→緑→赤の順
に
3 バイト( 24bit )の配列として並んで格納されて
いる
これが出力すればあとは画像変換ソフトで、
どんな形式でも変換可能( jpeg や png も)
- 8.
設計コンセプト
図形を見てみると横線と
縦線と塗りでできている
縦線は短い横線で表現で
きる
塗りは横線をたくさん引
けば表現できる
割と単純に実装できそう
- 9.
当時の設計
1. 全てが 233 という数値を取る 22932 個
の要素を持つ配列を作る
RGB 値 ( 233, 233, 233 )のグレー
縦 78× 横 98pixel×3byte 分の bytes 列
2. ここに台紙や各紙片を描けばいい
3. 適切にフィットさせるために、縮尺や座
標系の変換は必要
- 10.
当時の設計
4. 横線を描く関数
sub drawLineHolizontal {
local($posX,$posY,$length,$color,*bitpattern) = @_;
local($i) = 0;
$posX = int($posX / $scale);
$posY = int($posY / $scale);
$length = int($length / $scale);
if($length + $posX > $BMP_width) {$length = $BMP_width - $posX;}
for($i=0;$i<=$length;$i++) {
$bitpattern[$posY * $BMP_width + $i+ $posX] = $color;
}
}
- 11.
当時の設計
5. 縦線を描く関数
sub drawLineVertical {
local($posX,$posY,$length,$color,*bitpattern) = @_;
$posX = int($posX / $scale);
$posY = int($posY / $scale);
$length = int($length / $scale);
local($i) = 0;
if($length + $posY > $BMP_height) {$length = $BMP_height - $posY;}
for($i=0;$i<=$length;$i++) {
$bitpattern[($posY + $i) * $BMP_width + $posX] = $color;
}
}
- 12.
当時の設計
6. 矩形を描く
縦線を 2 本、横線を 2 本描く
さきほどの drawLineVertical() を 2 回呼ぶ
さきほどの drawLineHolizontal() を 2 回呼ぶ
6. 矩形で塗りつぶす
横線をいっぱい描く(笑)
さきほどの drawLineHolizontal() を高さ分呼ぶ
逆でもいいけど、計算速度的にアレなので
- 13.
当時の設計
8. フォルダを掘る
mkdir(" タックシール設定 ",0755);
for($i=0;$i<=$#foldername;$i++) {
mkdir(" タックシール設定 ".$foldername[$i],0755);
}
8. ヘッダをつけてバイナリモードで書き出
す
binmode($fh); とか
$buff .= pack(“C*”,$GValue); とか
- 14.
- 15.
- 16.

![当時の設計
4. 横線を描く関数
sub drawLineHolizontal {
local($posX,$posY,$length,$color,*bitpattern) = @_;
local($i) = 0;
$posX = int($posX / $scale);
$posY = int($posY / $scale);
$length = int($length / $scale);
if($length + $posX > $BMP_width) {$length = $BMP_width - $posX;}
for($i=0;$i<=$length;$i++) {
$bitpattern[$posY * $BMP_width + $i+ $posX] = $color;
}
}](https://image.slidesharecdn.com/hokkaido-pm-casual03-121113075136-phpapp01/85/Hokkaido-pm-casual-03-slide-10-320.jpg)
![当時の設計
5. 縦線を描く関数
sub drawLineVertical {
local($posX,$posY,$length,$color,*bitpattern) = @_;
$posX = int($posX / $scale);
$posY = int($posY / $scale);
$length = int($length / $scale);
local($i) = 0;
if($length + $posY > $BMP_height) {$length = $BMP_height - $posY;}
for($i=0;$i<=$length;$i++) {
$bitpattern[($posY + $i) * $BMP_width + $posX] = $color;
}
}](https://image.slidesharecdn.com/hokkaido-pm-casual03-121113075136-phpapp01/85/Hokkaido-pm-casual-03-slide-11-320.jpg)
![当時の設計
8. フォルダを掘る
mkdir(" タックシール設定 ",0755);
for($i=0;$i<=$#foldername;$i++) {
mkdir(" タックシール設定 ".$foldername[$i],0755);
}
8. ヘッダをつけてバイナリモードで書き出
す
binmode($fh); とか
$buff .= pack(“C*”,$GValue); とか](https://image.slidesharecdn.com/hokkaido-pm-casual03-121113075136-phpapp01/85/Hokkaido-pm-casual-03-slide-13-320.jpg)