Download as PDF, PPTX
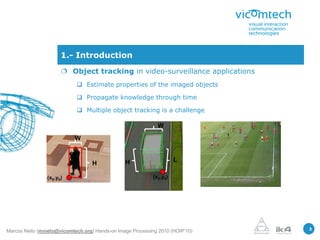





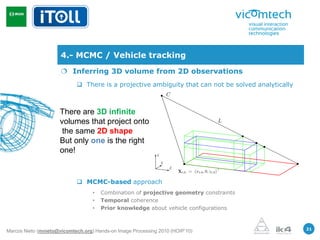
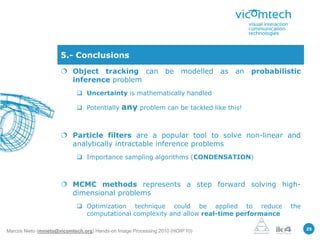


The document discusses probabilistic object tracking methods for video surveillance, focusing on Bayesian filtering and particle filters for estimating the properties of observed objects over time. It highlights the challenges of multiple object tracking and introduces the Markov Chain Monte Carlo (MCMC) methods as advanced approaches for high-dimensional inference problems. The conclusion emphasizes that these probabilistic models facilitate handling uncertainty and can be optimized for real-time performance.


























































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)




