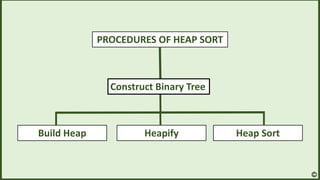
The document provides a detailed explanation of the heap sort algorithm, including its history, definitions, and the steps involved in executing the algorithm. It outlines key concepts like building a max heap, the procedure of heapifying an array, and implementing the sort through pseudocode. The content is structured academically for a computer science course, making it suitable for students learning sorting algorithms.


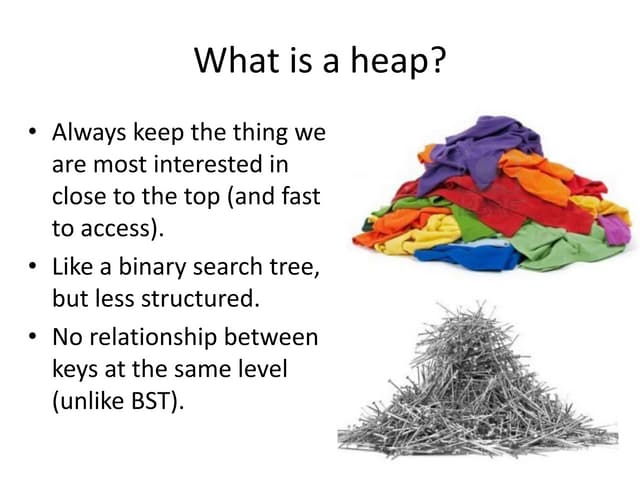
![HEAP PROPERTY
Max Heap Min Heap
10
5 3
4 1
1
3 5
4 7
A[Parent(i)] ≥ A[i] A[Parent(i)] ≤ A[i]
3
5 4 1
10
0 1 2 3 4
Index
Data 5
3 4 7
1
0 1 2 3 4](https://image.slidesharecdn.com/final-220914060800-a28a264b/85/Heap-Sort-ppx-5-320.jpg)
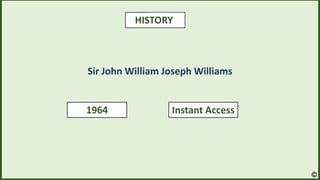
![HEAPIFY
Heapify(A, i)
{
l <- left(i)
r <- right(i)
if l <= heapsize[A] and A[l] > A[i]
then largest <- l
else largest <- i
if r <= heapsize[A] and A[r] > A[largest]
then largest <- r
if largest != i
then swap A[i] <-A[largest]
Heapify(A, largest)
}
4
10 3
10
4 3
Swap](https://image.slidesharecdn.com/final-220914060800-a28a264b/85/Heap-Sort-ppx-7-320.jpg)
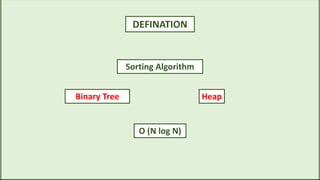
![BUILD HEAP
3
10 5 1
4
0 1 2 3 4
Index
Data
4
10 3
5 1
Internal Nodes
Buildheap(A)
{
heapsize[A] length[A]
for i |length[A]/2 //down to 0
do Heapify(A, i)
}](https://image.slidesharecdn.com/final-220914060800-a28a264b/85/Heap-Sort-ppx-8-320.jpg)
![BUILD HEAP
Buildheap(A)
{
heapsize[A] length[A]
for i |length[A]/2 //down to 0
do Heapify(A, i)
}
3
5 4 1
10
0 1 2 3 4
Index
Data
10
5 3
4 1](https://image.slidesharecdn.com/final-220914060800-a28a264b/85/Heap-Sort-ppx-9-320.jpg)
![HEAP SORT
Heapsort(A)
{
Buildheap(A)
for i length[A]
do swap A[1] A[i]
heapsize[A] heapsize[A] - 1
Heapify(A, 1)
}
0 1 2 3 4
4
3 5 10
1
Index
Data
3
5 4 1
10
0 1 2 3 4
Index
Data
0 1 2 3 4
3
5 4 1
10
Index
Data
Swap
0 1 2 3 4
3
5 4 10
1
Index
Data](https://image.slidesharecdn.com/final-220914060800-a28a264b/85/Heap-Sort-ppx-10-320.jpg)
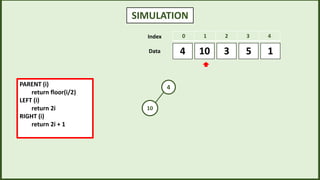
![SIMULATION
3
10 5 1
4
0 1 2 3 4
Index
Data
4
10 3
5 1
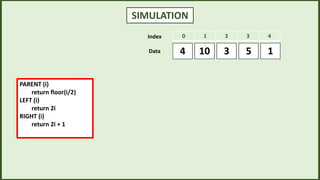
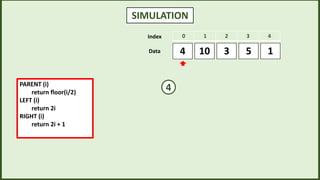
Heapify(A, i)
{
l <- left(i)
r <- right(i)
if l <= heapsize[A] and A[l] > A[i]
then largest <- l
else largest <- i
if r <= heapsize[A] and A[r] > A[largest]
then largest <- r
if largest != i
then swap A[i] <-A[largest]
Heapify(A, largest)
}
Buildheap(A)
{
heapsize[A] length[A]
for i |length[A]/2
do Heapify(A, i)
}
Heapsort(A)
{
Buildheap(A)
for i length[A]
do swap A[1] A[i]
heapsize[A] heapsize[A] - 1
Heapify(A, 1)
}](https://image.slidesharecdn.com/final-220914060800-a28a264b/85/Heap-Sort-ppx-18-320.jpg)
![SIMULATION
3
10 5 1
4
0 1 2 3 4
Index
Data
4
10 3
5 1
10 is greater than 4
then swap A[i] <-A[largest]
Swap 4 and 10
Swap
Heapify(A, i)
{
l <- left(i)
r <- right(i)
if l <= heapsize[A] and A[l] > A[i]
then largest <- l
else largest <- i
if r <= heapsize[A] and A[r] > A[largest]
then largest <- r
if largest != i
then swap A[i] <-A[largest]
Heapify(A, largest)
}
Buildheap(A)
{
heapsize[A] length[A]
for i |length[A]/2
do Heapify(A, i)
}
Heapsort(A)
{
Buildheap(A)
for i length[A]
do swap A[1] A[i]
heapsize[A] heapsize[A] - 1
Heapify(A, 1)
}](https://image.slidesharecdn.com/final-220914060800-a28a264b/85/Heap-Sort-ppx-19-320.jpg)
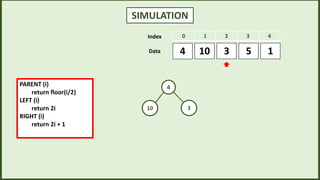
![SIMULATION
3
4 5 1
10
0 1 2 3 4
Index
Data
10
4 3
5 1
Heapify(A, i)
{
l <- left(i)
r <- right(i)
if l <= heapsize[A] and A[l] > A[i]
then largest <- l
else largest <- i
if r <= heapsize[A] and A[r] > A[largest]
then largest <- r
if largest != i
then swap A[i] <-A[largest]
Heapify(A, largest)
}
Buildheap(A)
{
heapsize[A] length[A]
for i |length[A]/2
do Heapify(A, i)
}
Heapsort(A)
{
Buildheap(A)
for i length[A]
do swap A[1] A[i]
heapsize[A] heapsize[A] - 1
Heapify(A, 1)
}](https://image.slidesharecdn.com/final-220914060800-a28a264b/85/Heap-Sort-ppx-20-320.jpg)
![SIMULATION
3
4 5 1
10
0 1 2 3 4
Index
Data
5 is greater than 4
then swap A[i] <-A[largest]
Swap 5 and 4
10
4 3
5 1
Swap
Heapify(A, i)
{
l <- left(i)
r <- right(i)
if l <= heapsize[A] and A[l] > A[i]
then largest <- l
else largest <- i
if r <= heapsize[A] and A[r] > A[largest]
then largest <- r
if largest != i
then swap A[i] <-A[largest]
Heapify(A, largest)
}
Buildheap(A)
{
heapsize[A] length[A]
for i |length[A]/2
do Heapify(A, i)
}
Heapsort(A)
{
Buildheap(A)
for i length[A]
do swap A[1] A[i]
heapsize[A] heapsize[A] - 1
Heapify(A, 1)
}](https://image.slidesharecdn.com/final-220914060800-a28a264b/85/Heap-Sort-ppx-21-320.jpg)
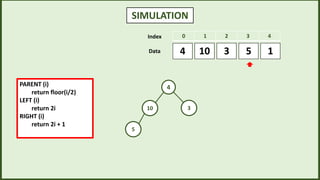
![SIMULATION
3
5 4 1
10
0 1 2 3 4
Index
Data
10
5 3
4 1
Heapify(A, i)
{
l <- left(i)
r <- right(i)
if l <= heapsize[A] and A[l] > A[i]
then largest <- l
else largest <- i
if r <= heapsize[A] and A[r] > A[largest]
then largest <- r
if largest != i
then swap A[i] <-A[largest]
Heapify(A, largest)
}
Buildheap(A)
{
heapsize[A] length[A]
for i |length[A]/2
do Heapify(A, i)
}
Heapsort(A)
{
Buildheap(A)
for i length[A]
do swap A[1] A[i]
heapsize[A] heapsize[A] - 1
Heapify(A, 1)
}](https://image.slidesharecdn.com/final-220914060800-a28a264b/85/Heap-Sort-ppx-22-320.jpg)
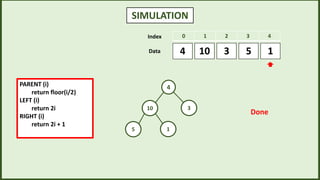
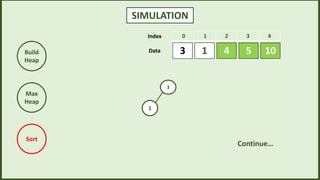
![SIMULATION
3
5 4 1
10
0 1 2 3 4
Index
Data
10
5 3
4 1
After Build Heap
Heapify(A, i)
{
l <- left(i)
r <- right(i)
if l <= heapsize[A] and A[l] > A[i]
then largest <- l
else largest <- i
if r <= heapsize[A] and A[r] > A[largest]
then largest <- r
if largest != i
then swap A[i] <-A[largest]
Heapify(A, largest)
}
Buildheap(A)
{
heapsize[A] length[A]
for i |length[A]/2
do Heapify(A, i)
}
Heapsort(A)
{
Buildheap(A)
for i length[A]
do swap A[1] A[i]
heapsize[A] heapsize[A] - 1
Heapify(A, 1)
}](https://image.slidesharecdn.com/final-220914060800-a28a264b/85/Heap-Sort-ppx-23-320.jpg)
![SIMULATION
0 1 2 3 4
3
5 4 1
10
Index
Data
10
5 3
4 1
Heapify(A, i)
{
l <- left(i)
r <- right(i)
if l <= heapsize[A] and A[l] > A[i]
then largest <- l
else largest <- i
if r <= heapsize[A] and A[r] > A[largest]
then largest <- r
if largest != i
then swap A[i] <-A[largest]
Heapify(A, largest)
}
Buildheap(A)
{
heapsize[A] length[A]
for i |length[A]/2
do Heapify(A, i)
}
Heapsort(A)
{
Buildheap(A)
for i length[A] //down to 2
do swap A[1] A[i]
heapsize[A] heapsize[A] - 1
Heapify(A, 1)
}](https://image.slidesharecdn.com/final-220914060800-a28a264b/85/Heap-Sort-ppx-24-320.jpg)
![SIMULATION
0 1 2 3 4
3
5 4 1
10
Index
Data
10
5 3
4 1
Swap
Swapping the first
element with the last
element of unsorted
array
Heapify(A, i)
{
l <- left(i)
r <- right(i)
if l <= heapsize[A] and A[l] > A[i]
then largest <- l
else largest <- i
if r <= heapsize[A] and A[r] > A[largest]
then largest <- r
if largest != i
then swap A[i] <-A[largest]
Heapify(A, largest)
}
Buildheap(A)
{
heapsize[A] length[A]
for i |length[A]/2
do Heapify(A, i)
}
Heapsort(A)
{
Buildheap(A)
for i length[A]
do swap A[1] A[i]
heapsize[A] heapsize[A] - 1
Heapify(A, 1)
}](https://image.slidesharecdn.com/final-220914060800-a28a264b/85/Heap-Sort-ppx-25-320.jpg)
![SIMULATION
0 1 2 3 4
3
5 4 10
1
Index
Data
1
5 3
4 10 Deleting the last element as sorted
Heapify(A, i)
{
l <- left(i)
r <- right(i)
if l <= heapsize[A] and A[l] > A[i]
then largest <- l
else largest <- i
if r <= heapsize[A] and A[r] > A[largest]
then largest <- r
if largest != i
then swap A[i] <-A[largest]
Heapify(A, largest)
}
Buildheap(A)
{
heapsize[A] length[A]
for i |length[A]/2
do Heapify(A, i)
}
Heapsort(A)
{
Buildheap(A)
for i length[A]
do swap A[1] A[i]
heapsize[A] heapsize[A] - 1
Heapify(A, 1)
}](https://image.slidesharecdn.com/final-220914060800-a28a264b/85/Heap-Sort-ppx-26-320.jpg)
![SIMULATION
0 1 2 3 4
3
5 4 10
1
Index
Data
1
5 3
4
Sorted Array
Heapify(A, i)
{
l <- left(i)
r <- right(i)
if l <= heapsize[A] and A[l] > A[i]
then largest <- l
else largest <- i
if r <= heapsize[A] and A[r] > A[largest]
then largest <- r
if largest != i
then swap A[i] <-A[largest]
Heapify(A, largest)
}
Buildheap(A)
{
heapsize[A] length[A]
for i |length[A]/2
do Heapify(A, i)
}
Heapsort(A)
{
Buildheap(A)
for i length[A]
do swap A[1] A[i]
heapsize[A] heapsize[A] - 1
Heapify(A, 1)
}](https://image.slidesharecdn.com/final-220914060800-a28a264b/85/Heap-Sort-ppx-27-320.jpg)
![SIMULATION
0 1 2 3 4
3
5 4 10
1
Index
Data
1
5 3
4
Calling Heapify
Heapify(A, i)
{
l <- left(i)
r <- right(i)
if l <= heapsize[A] and A[l] > A[i]
then largest <- l
else largest <- i
if r <= heapsize[A] and A[r] > A[largest]
then largest <- r
if largest != i
then swap A[i] <-A[largest]
Heapify(A, largest)
}
Buildheap(A)
{
heapsize[A] length[A]
for i |length[A]/2
do Heapify(A, i)
}
Heapsort(A)
{
Buildheap(A)
for i length[A]
do swap A[1] A[i]
heapsize[A] heapsize[A] - 1
Heapify(A, 1)
}](https://image.slidesharecdn.com/final-220914060800-a28a264b/85/Heap-Sort-ppx-28-320.jpg)
![SIMULATION
0 1 2 3 4
3
5 4 10
1
Index
Data
1
5 3
4
5 is greater than 1
then swap A[i] <-A[largest]
Swap 5 and 1
Swap
Heapify(A, i)
{
l <- left(i)
r <- right(i)
if l <= heapsize[A] and A[l] > A[i]
then largest <- l
else largest <- i
if r <= heapsize[A] and A[r] > A[largest]
then largest <- r
if largest != i
then swap A[i] <-A[largest]
Heapify(A, largest)
}
Buildheap(A)
{
heapsize[A] length[A]
for i |length[A]/2
do Heapify(A, i)
}
Heapsort(A)
{
Buildheap(A)
for i length[A]
do swap A[1] A[i]
heapsize[A] heapsize[A] - 1
Heapify(A, 1)
}](https://image.slidesharecdn.com/final-220914060800-a28a264b/85/Heap-Sort-ppx-29-320.jpg)
![SIMULATION
0 1 2 3 4
3
1 4 10
5
Index
Data
5
1 3
4
5 is greater than 1
then swap A[i] <-A[largest]
Swap 5 and 1
Heapify(A, i)
{
l <- left(i)
r <- right(i)
if l <= heapsize[A] and A[l] > A[i]
then largest <- l
else largest <- i
if r <= heapsize[A] and A[r] > A[largest]
then largest <- r
if largest != i
then swap A[i] <-A[largest]
Heapify(A, largest)
}
Buildheap(A)
{
heapsize[A] length[A]
for i |length[A]/2
do Heapify(A, i)
}
Heapsort(A)
{
Buildheap(A)
for i length[A]
do swap A[1] A[i]
heapsize[A] heapsize[A] - 1
Heapify(A, 1)
}](https://image.slidesharecdn.com/final-220914060800-a28a264b/85/Heap-Sort-ppx-30-320.jpg)
![SIMULATION
0 1 2 3 4
3
1 4 10
5
Index
Data
5
1 3
4
4 is greater than 1
then swap A[i] <-A[largest]
Swap 4 and 1
Swap
Heapify(A, i)
{
l <- left(i)
r <- right(i)
if l <= heapsize[A] and A[l] > A[i]
then largest <- l
else largest <- i
if r <= heapsize[A] and A[r] > A[largest]
then largest <- r
if largest != i
then swap A[i] <-A[largest]
Heapify(A, largest)
}
Buildheap(A)
{
heapsize[A] length[A]
for i |length[A]/2
do Heapify(A, i)
}
Heapsort(A)
{
Buildheap(A)
for i length[A]
do swap A[1] A[i]
heapsize[A] heapsize[A] - 1
Heapify(A, 1)
}](https://image.slidesharecdn.com/final-220914060800-a28a264b/85/Heap-Sort-ppx-31-320.jpg)
![SIMULATION
0 1 2 3 4
3
4 1 10
5
Index
Data
5
4 3
1
Heapify(A, i)
{
l <- left(i)
r <- right(i)
if l <= heapsize[A] and A[l] > A[i]
then largest <- l
else largest <- i
if r <= heapsize[A] and A[r] > A[largest]
then largest <- r
if largest != i
then swap A[i] <-A[largest]
Heapify(A, largest)
}
Buildheap(A)
{
heapsize[A] length[A]
for i |length[A]/2
do Heapify(A, i)
}
Heapsort(A)
{
Buildheap(A)
for i length[A]
do swap A[1] A[i]
heapsize[A] heapsize[A] - 1
Heapify(A, 1)
}](https://image.slidesharecdn.com/final-220914060800-a28a264b/85/Heap-Sort-ppx-32-320.jpg)
![Swap
SIMULATION
0 1 2 3 4
3
4 1 10
5
Index
Data
5
4 3
1
Swapping the first
element with the last
element of unsorted
array and delete the
last element as
sorted
Heapify(A, i)
{
l <- left(i)
r <- right(i)
if l <= heapsize[A] and A[l] > A[i]
then largest <- l
else largest <- i
if r <= heapsize[A] and A[r] > A[largest]
then largest <- r
if largest != i
then swap A[i] <-A[largest]
Heapify(A, largest)
}
Buildheap(A)
{
heapsize[A] length[A]
for i |length[A]/2
do Heapify(A, i)
}
Heapsort(A)
{
Buildheap(A)
for i length[A] //down to 2
do swap A[1] A[i]
heapsize[A] heapsize[A] - 1
Heapify(A, 1)
}](https://image.slidesharecdn.com/final-220914060800-a28a264b/85/Heap-Sort-ppx-33-320.jpg)
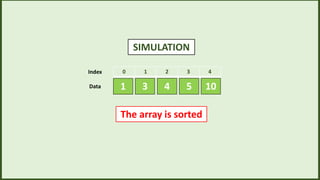
![SIMULATION
0 1 2 3 4
3
4 5 10
1
Index
Data
1
4 3
Sorted Array
Heapify(A, i)
{
l <- left(i)
r <- right(i)
if l <= heapsize[A] and A[l] > A[i]
then largest <- l
else largest <- i
if r <= heapsize[A] and A[r] > A[largest]
then largest <- r
if largest != i
then swap A[i] <-A[largest]
Heapify(A, largest)
}
Buildheap(A)
{
heapsize[A] length[A]
for i |length[A]/2
do Heapify(A, i)
}
Heapsort(A)
{
Buildheap(A)
for i length[A]
do swap A[1] A[i]
heapsize[A] heapsize[A] - 1
Heapify(A, 1)
}](https://image.slidesharecdn.com/final-220914060800-a28a264b/85/Heap-Sort-ppx-34-320.jpg)
![SIMULATION
0 1 2 3 4
3
4 5 10
1
Index
Data
1
4 3
4 is greater than 1
then swap A[i] <-A[largest]
Swap 4 and 1
Swap
Heapify(A, i)
{
l <- left(i)
r <- right(i)
if l <= heapsize[A] and A[l] > A[i]
then largest <- l
else largest <- i
if r <= heapsize[A] and A[r] > A[largest]
then largest <- r
if largest != i
then swap A[i] <-A[largest]
Heapify(A, largest)
}
Buildheap(A)
{
heapsize[A] length[A]
for i |length[A]/2
do Heapify(A, i)
}
Heapsort(A)
{
Buildheap(A)
for i length[A]
do swap A[1] A[i]
heapsize[A] heapsize[A] - 1
Heapify(A, 1)
}](https://image.slidesharecdn.com/final-220914060800-a28a264b/85/Heap-Sort-ppx-35-320.jpg)
![SIMULATION
0 1 2 3 4
3
1 5 10
4
Index
Data
4
1 3
Heapify(A, i)
{
l <- left(i)
r <- right(i)
if l <= heapsize[A] and A[l] > A[i]
then largest <- l
else largest <- i
if r <= heapsize[A] and A[r] > A[largest]
then largest <- r
if largest != i
then swap A[i] <-A[largest]
Heapify(A, largest)
}
Buildheap(A)
{
heapsize[A] length[A]
for i |length[A]/2
do Heapify(A, i)
}
Heapsort(A)
{
Buildheap(A)
for i length[A]
do swap A[1] A[i]
heapsize[A] heapsize[A] - 1
Heapify(A, 1)
}](https://image.slidesharecdn.com/final-220914060800-a28a264b/85/Heap-Sort-ppx-36-320.jpg)
![SIMULATION
0 1 2 3 4
3
1 5 10
4
Index
Data
4
1 3
Swap
Swapping the first
element with the last
element of unsorted
array and delete the
last element as
sorted
Heapify(A, i)
{
l <- left(i)
r <- right(i)
if l <= heapsize[A] and A[l] > A[i]
then largest <- l
else largest <- i
if r <= heapsize[A] and A[r] > A[largest]
then largest <- r
if largest != i
then swap A[i] <-A[largest]
Heapify(A, largest)
}
Buildheap(A)
{
heapsize[A] length[A]
for i |length[A]/2
do Heapify(A, i)
}
Heapsort(A)
{
Buildheap(A)
for i length[A]
do swap A[1] A[i]
heapsize[A] heapsize[A] - 1
Heapify(A, 1)
}](https://image.slidesharecdn.com/final-220914060800-a28a264b/85/Heap-Sort-ppx-37-320.jpg)
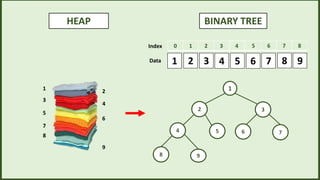
![Heapify(A, i)
{
l <- left(i)
r <- right(i)
if l <= heapsize[A] and A[l] > A[i]
then largest <- l
else largest <- i
if r <= heapsize[A] and A[r] > A[largest]
then largest <- r
if largest != i
then swap A[i] <-A[largest]
Heapify(A, largest)
}
Buildheap(A)
{
heapsize[A] length[A]
for i |length[A]/2
do Heapify(A, i)
}
Heapsort(A)
{
Buildheap(A)
for i length[A]
do swap A[1] A[i]
heapsize[A] heapsize[A] - 1
Heapify(A, 1)
}
TIME COMPLEXITY ANALYSIS
O (N)
O(log N)
O (N log N)
(n – 1) O(N log N)](https://image.slidesharecdn.com/final-220914060800-a28a264b/85/Heap-Sort-ppx-40-320.jpg)