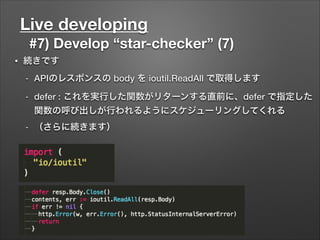
Agenda
1. Introduction
i. Doyou know golang?
ii. Do you know appengine?
iii. Why start appengine with golang?
2. About golang specification
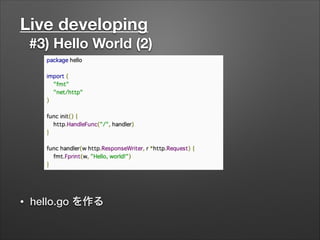
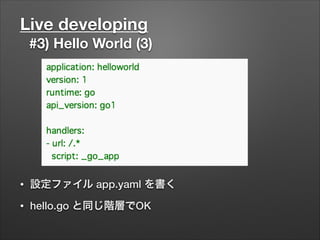
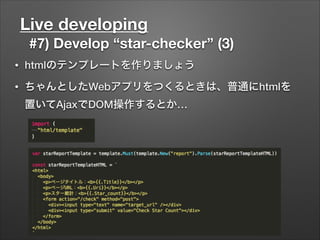
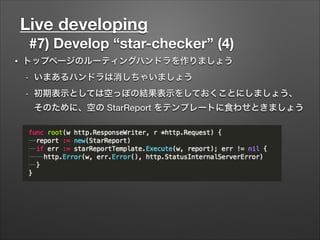
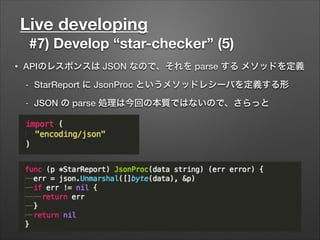
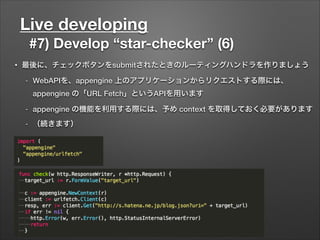
3. Live developing
4. まとめ
7.
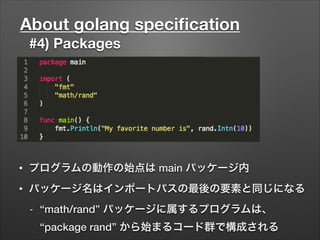
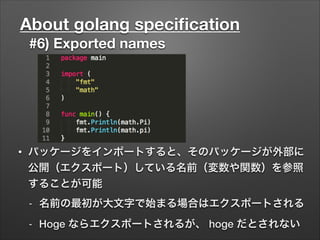
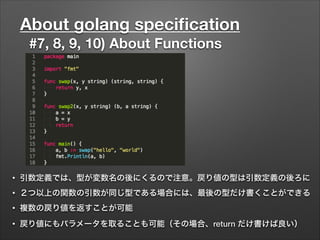
About golang specification
•まずは言語仕様から軽く・・・
• A Tour of Go
- http://tour.golang.org/
- 実行するコードは、golang.org サーバ上のGo Playgroundで動作
- 受けたGoコードをサーバでコンパイル・リンク・実行し、そして
その結果を返してくれる
• A Tour of Go (jp)
- http://go-tour-jp.appspot.com/
- 今日はここから要所をピックアップすることにします
- 数が多いので巻き気味でいきます
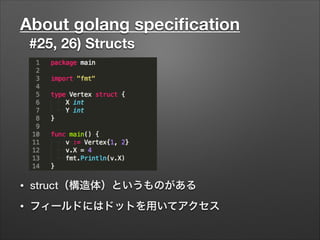
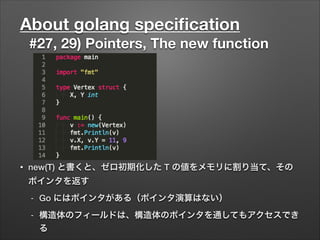
About golang specification
#27,29) Pointers, The new function
• new(T) と書くと、ゼロ初期化した T の値をメモリに割り当て、その
ポインタを返す
- Go にはポインタがある(ポインタ演算はない)
- 構造体のフィールドは、構造体のポインタを通してもアクセスでき
る
19.
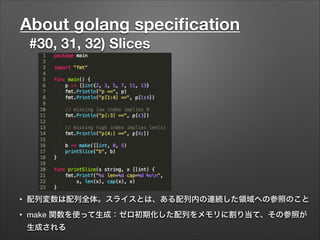
About golang specification
#30,31, 32) Slices
• 配列変数は配列全体。スライスとは、ある配列内の連続した領域への参照のこと
• make 関数を使って生成:ゼロ初期化した配列をメモリに割り当て、その参照が
生成される
20.
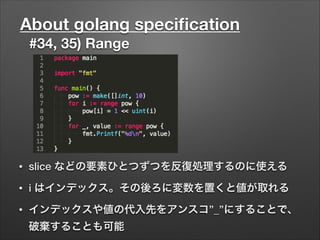
About golang specification
#34,35) Range
• slice などの要素ひとつずつを反復処理するのに使える
• i はインデックス。その後ろに変数を置くと値が取れる
• インデックスや値の代入先をアンスコ”_”にすることで、
破棄することも可能
21.
About golang specification
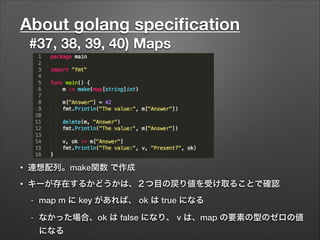
#37,38, 39, 40) Maps
• 連想配列。make関数 で作成
• キーが存在するかどうかは、2つ目の戻り値を受け取ることで確認
- map m に key があれば、 ok は true になる
- なかった場合、ok は false になり、 v は、map の要素の型のゼロの値
になる
22.
About golang specification
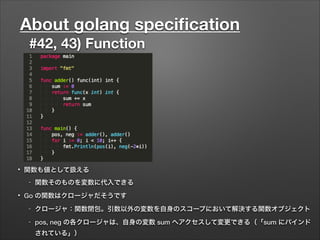
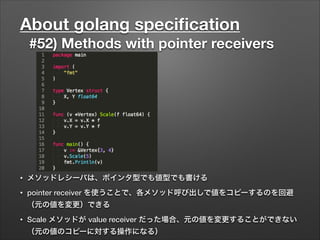
#42,43) Function
• 関数も値として扱える
- 関数そのものを変数に代入できる
• Go の関数はクロージャだそうです
- クロージャ:関数閉包。引数以外の変数を自身のスコープにおいて解決する関数オブジェクト
- pos, neg の各クロージャは、自身の変数 sum へアクセスして変更できる(「sum にバインド
されている」)
23.
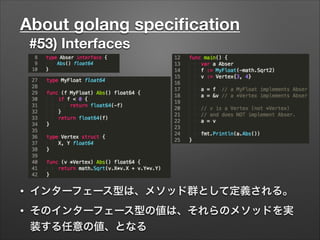
About golang specification
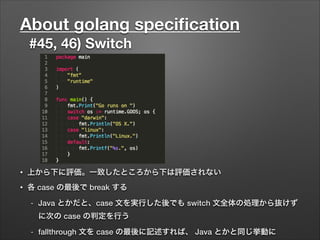
#45,46) Switch
• 上から下に評価。一致したところから下は評価されない
• 各 case の最後で break する
- Java とかだと、case 文を実行した後でも switch 文全体の処理から抜けず
に次の case の判定を行う
- fallthrough 文を case の最後に記述すれば、 Java とかと同じ挙動に
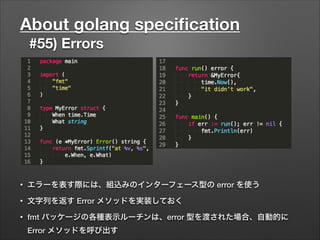
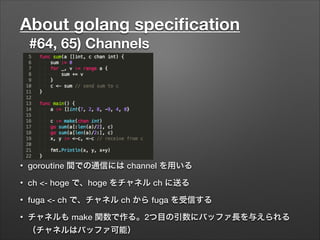
About golang specification
#63)Goroutines
• “goroutine” は、いわゆるスレッド(軽量)
• “go f(x, y, z)” と書けば、関数 f は新しい goroutine 上で実行される
• x, y, z の評価は現在の goroutine(スレッド)で評価され、新しい
goroutine で実行されるのは、関数 f
• goroutine は同じアドレス空間で実行されるため、共有メモリへの
アクセスは、きちんと同期する必要がある…
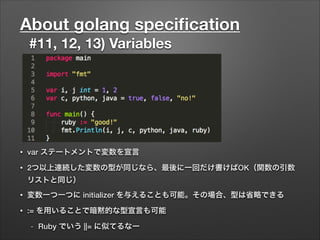
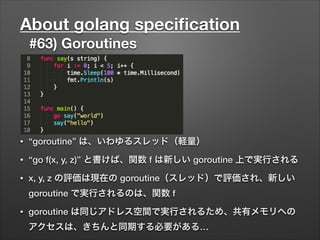
![Do you know appengine?
• 正式名称「Google App Engine」(略称GAE)
• Google 謹製の PaaS、プログラムを書いてデプロイするだけで
全世界に公開!
• AutoScaling
• KVS(Datastore)
• 小さなアプリであれば無料枠運用も可能
- AWSのような「1年間無料」とかではなく、各アプリごとに
無料で使える範囲が設定されている
- http[s]://<app-id>.appspot.com/
- 私もいくつかのアプリを運用しほったらかしています](https://image.slidesharecdn.com/2014-01-24fftt-140316025424-phpapp02/85/Go-appengine-4-320.jpg)