GAUSS ELIMINATION
METHOD &MATRIX
INVERSION METHOD
K.RAMYA
M.Sc. BIOPHYSICS
Department of Biophysics
Reg. no:34124003
2.
GAUSS ELIMINATION METHOD
TheGauss Elimination, in linear and multilinear algebra, is a
process for finding the solutions to a system of simultaneous
linear equations by first solving one of the equations for one
variable and then substituting the expression into the remaining
equations.
3.
GAUSS ELIMINATION METHOD
•WORKING RULE:
• Consider the system of equations
a11X + a12Y + a13Z = b1
a21X + a22Y+ a23Z = b2
a31X + a32Y + a33Z = b3
• In matrix for AX = B
=
4.
• Augmented matrix,C =
• Reduce the augmented matrix to echelon from using elementary row transformations,
C =
• The corresponding system of equations are
C11X + C12Y + C13Z = d1
C22Y + C23Z = d2
C33Z = d3
The solution of system is obtained by solving these equations by back substitution.
MATRIX INVERSION
• Thematrix inversion method involves finding the inverse of a matrix, which is
crucial in various fields like physics, engineering, statistics, and machine
learning.
• the matrix inversion method is a fundamental technique used to find the
inverse of a matrix, enabling the solution of simultaneous linear equations
and playing a vital role in various scientific and mathematical applications
12.
• This methodcan be applied only when the coefficient matrix is a
square matrix and non-singular.
• Consider a matrix equation
• AX=B (1)
• A square matrix and non-singular . Since A is non-
singular, and A=A =I
• Pre multiply both sides of equation(1) by , we get (A)X= B.
• That is, (A)X= B
• Hence we get X= B
13.
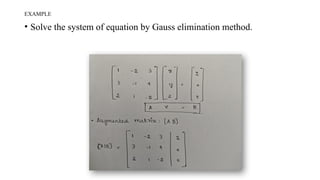
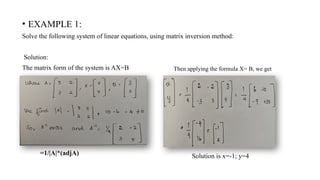
• EXAMPLE 1:
Solvethe following system of linear equations, using matrix inversion method:
Solution:
The matrix form of the system is AX=B
Solssssssssssssss
Then applying the formula X= B, we get
Solution is x=-1; y=4
=1/|A|*(adjA)
14.
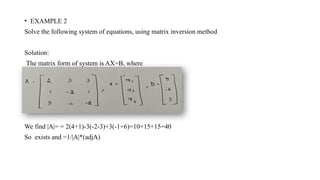
• EXAMPLE 2
Solvethe following system of equations, using matrix inversion method
Solution:
The matrix form of system is AX=B, where
We find |A|= = 2(4+1)-3(-2-3)+3(-1+6)=10+15+15=40
So exists and =1/|A|*(adjA)
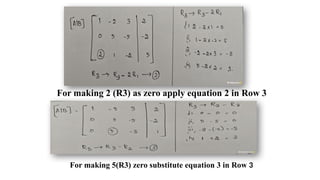
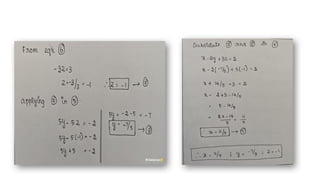
![• Now let us convert[A|B] to upper triangular matrix:
For making 3(R2) as zero applying equation 1 in Row 2](https://image.slidesharecdn.com/gausseliminationmethod-250404124716-4ed16801/85/GAUSS-ELIMINATION-METHOD-power-point-presentation-6-320.jpg)


![import numpy as np
# Define the 2x2 matrix
matrix = np.array([[1, 2], [3, 4]])
# Calculate the determinant
det = matrix[0, 0] * matrix[1, 1] - matrix[0, 1] * matrix[1, 0]
# Check if the matrix is invertible
if det != 0:
# Calculate the inverse matrix
inverse_matrix = np.array([[matrix[1, 1], -matrix[0, 1]], [-matrix[1, 0], matrix[0, 0]]]) / det
print("Inverse Matrix:")
print(inverse_matrix)
else:
print("Matrix is not invertible (determinant is zero).")
#output
Inverse Matrix: [[-2. 1. ] [ 1.5 -0.5]]](https://image.slidesharecdn.com/gausseliminationmethod-250404124716-4ed16801/85/GAUSS-ELIMINATION-METHOD-power-point-presentation-16-320.jpg)