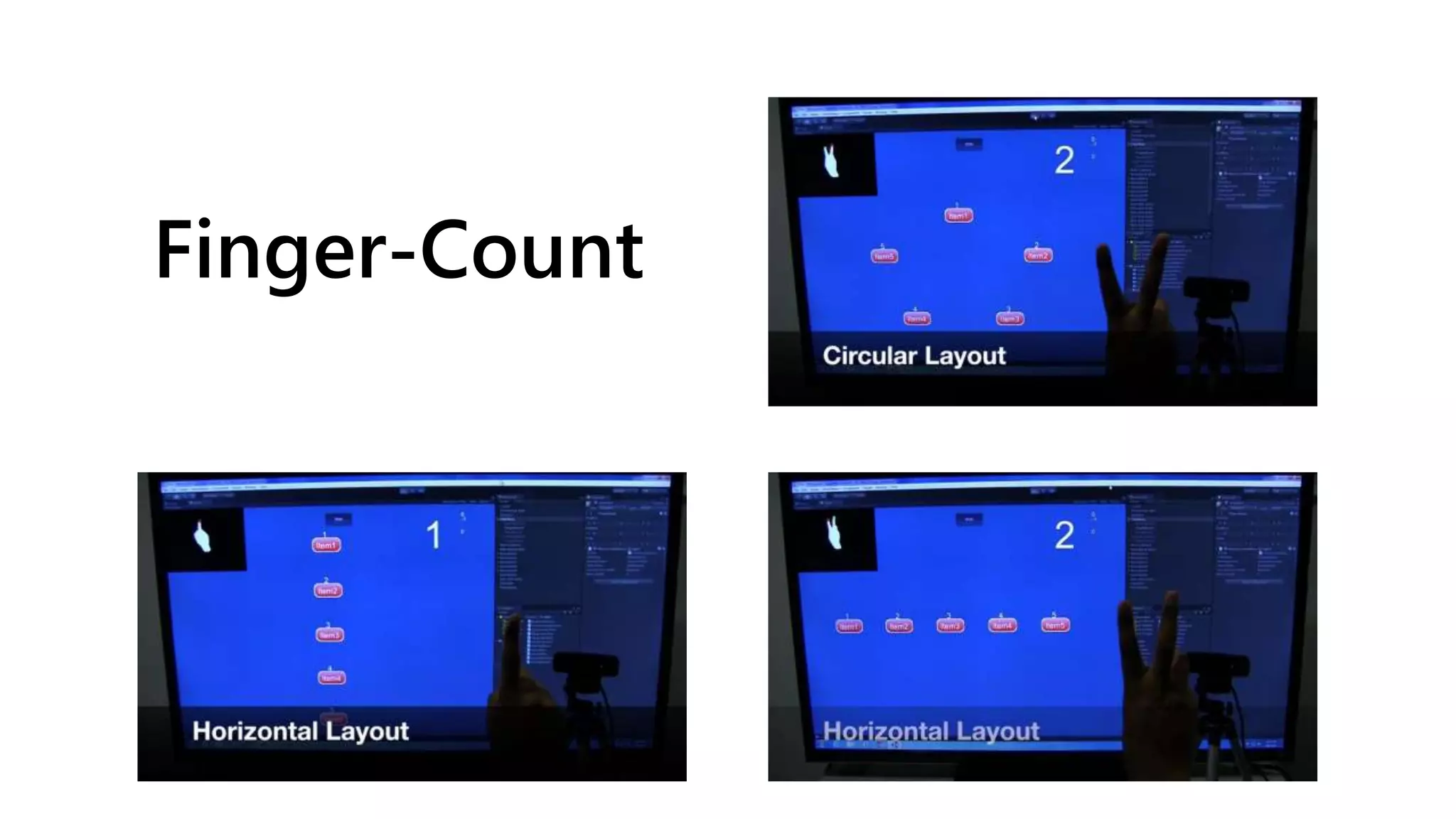
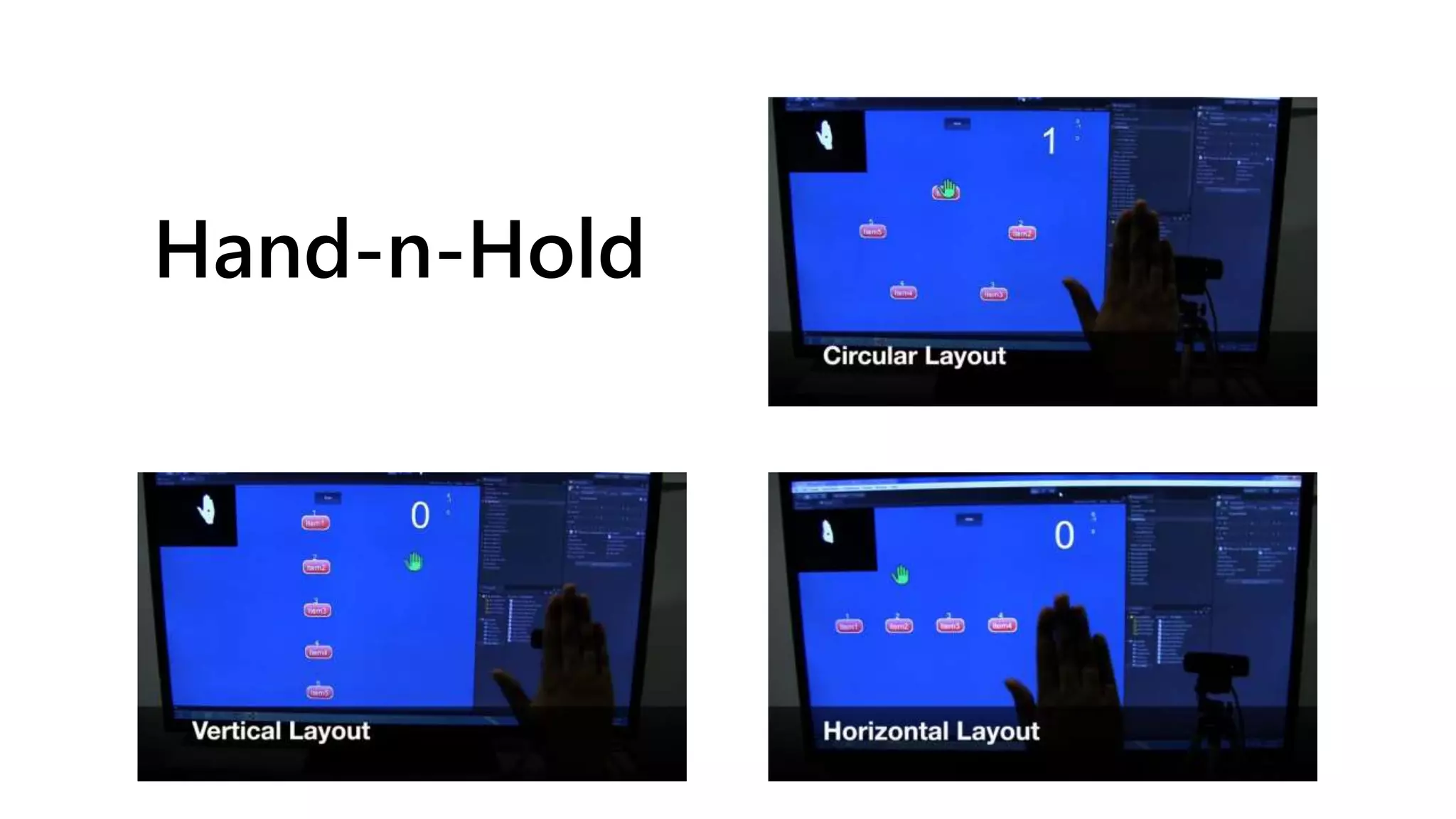
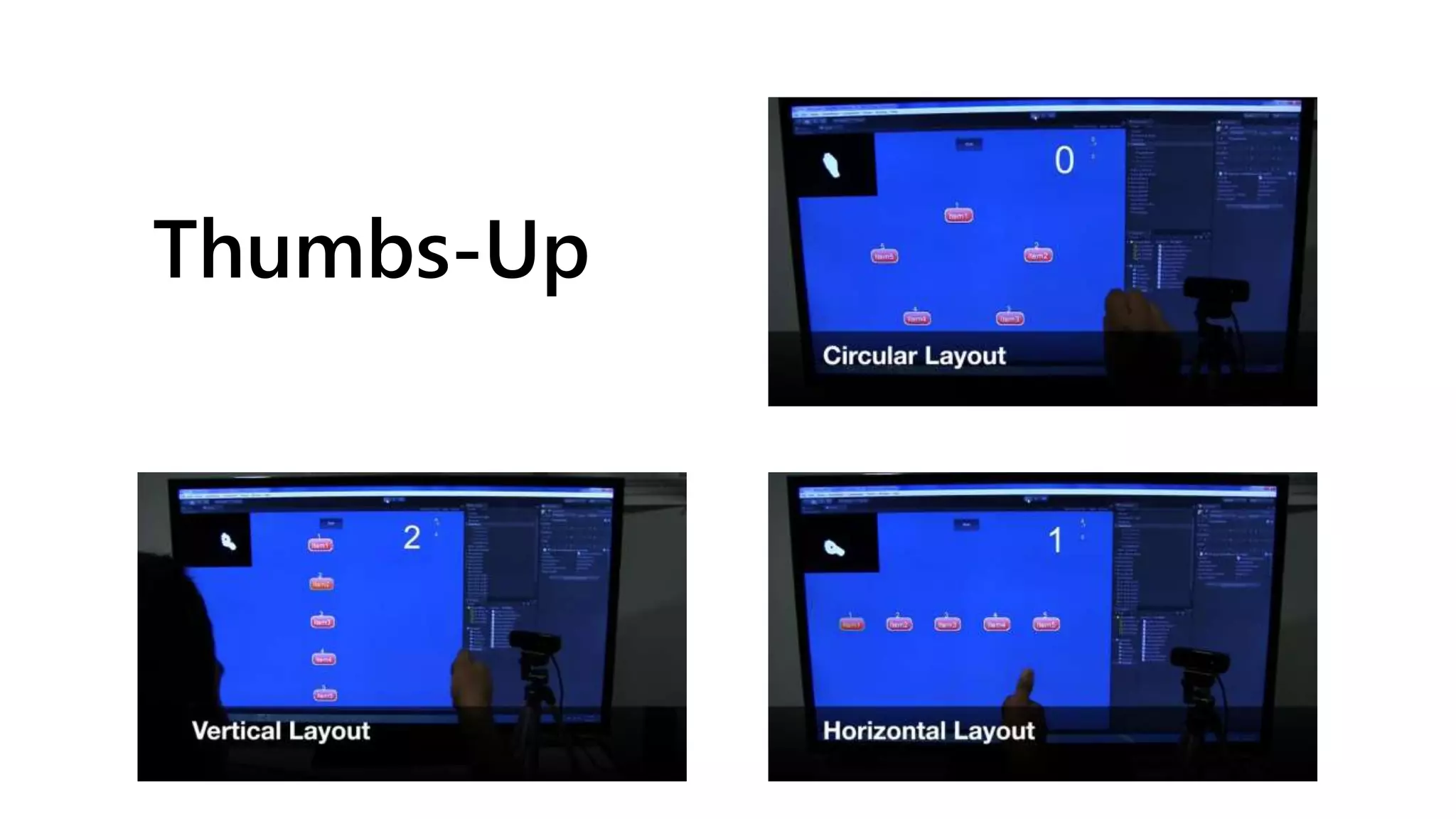
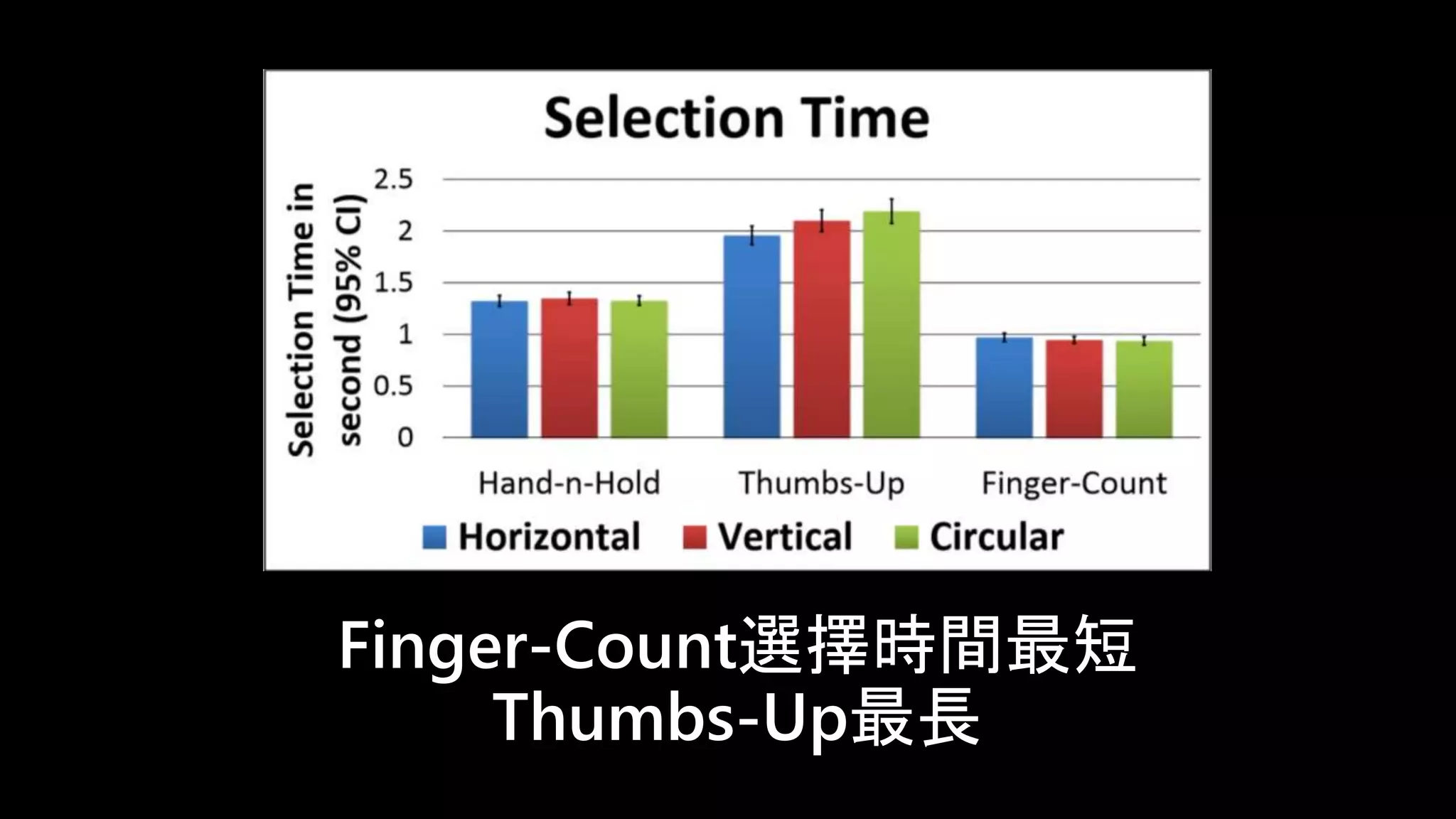
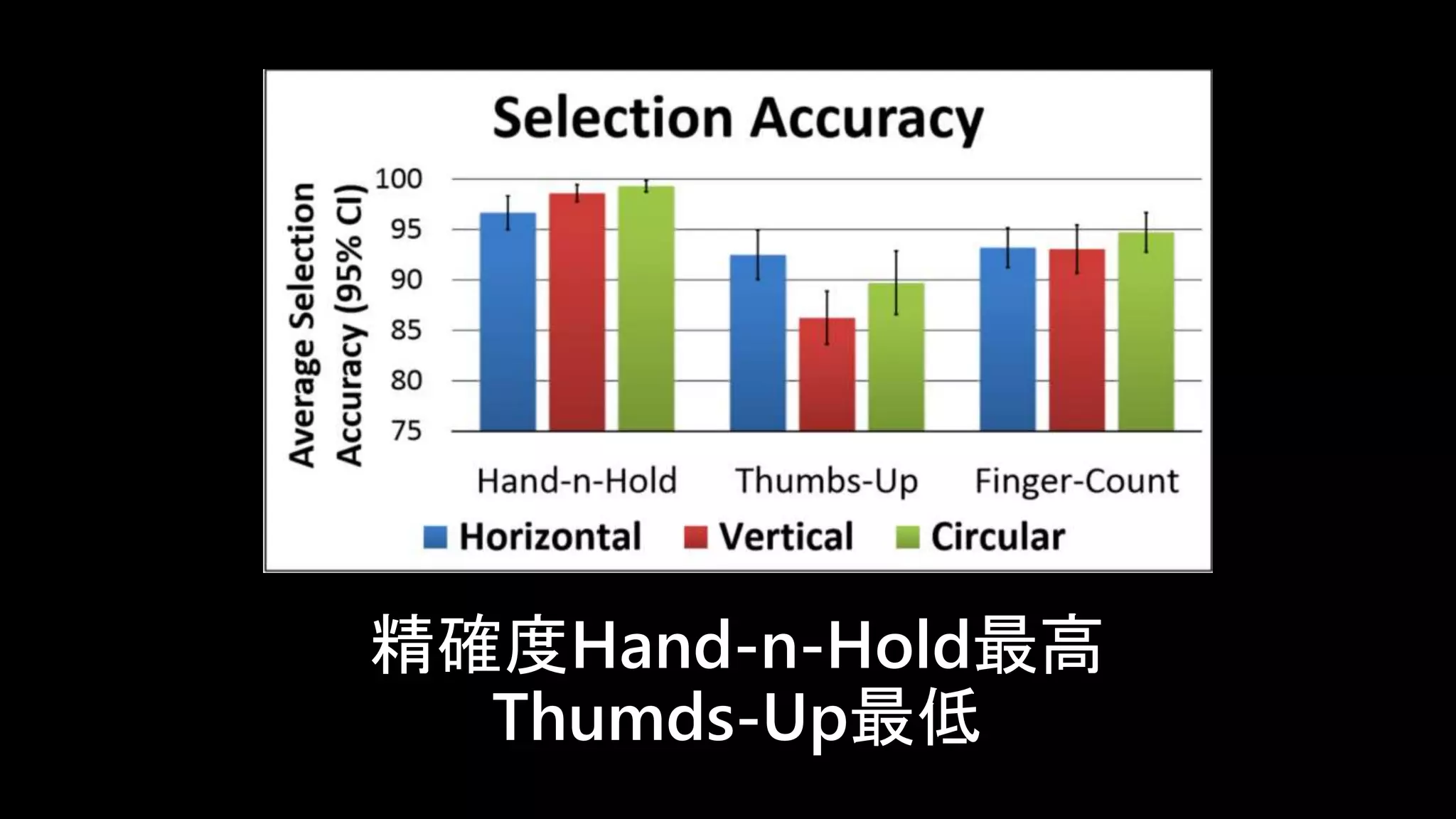
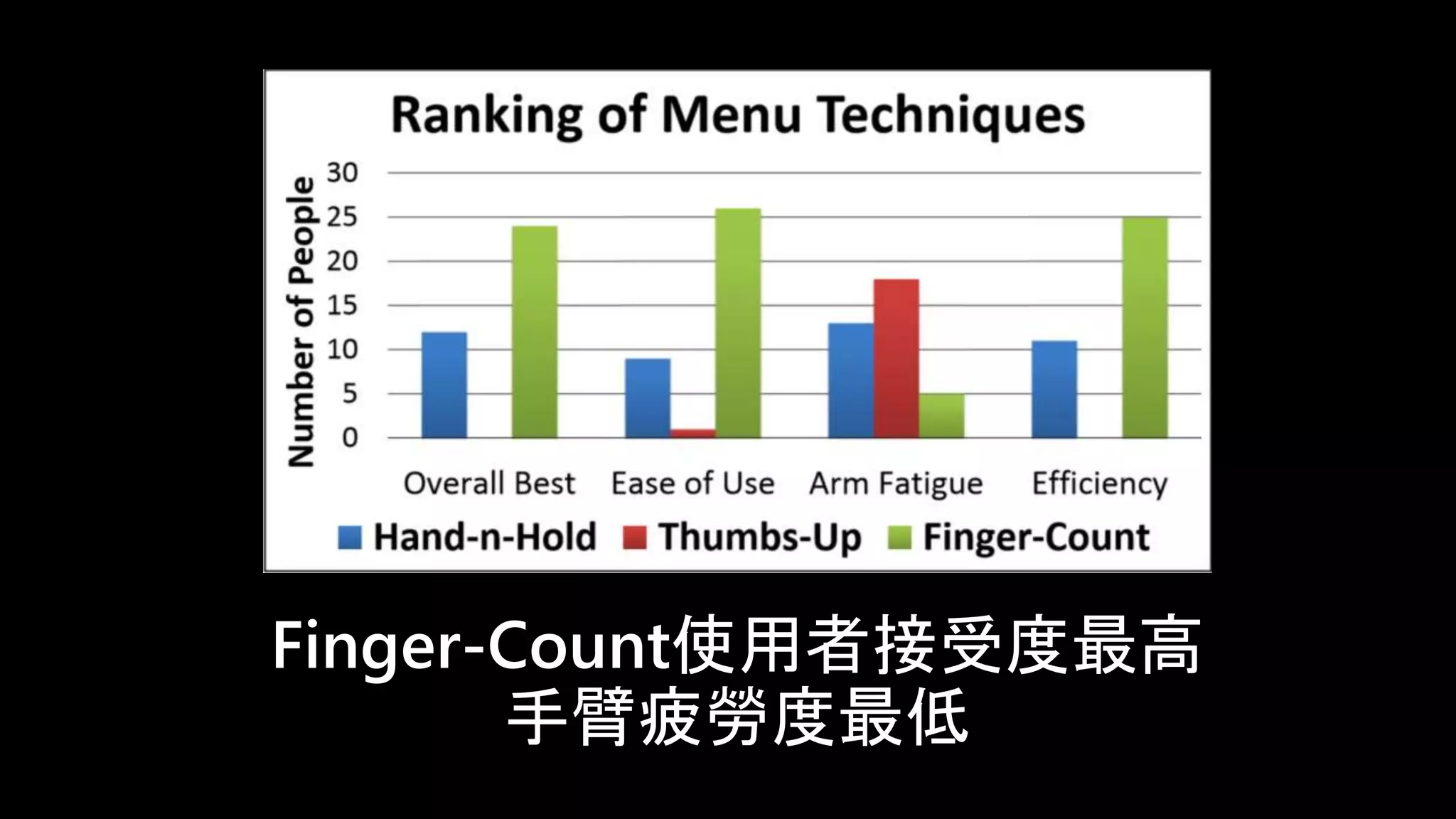
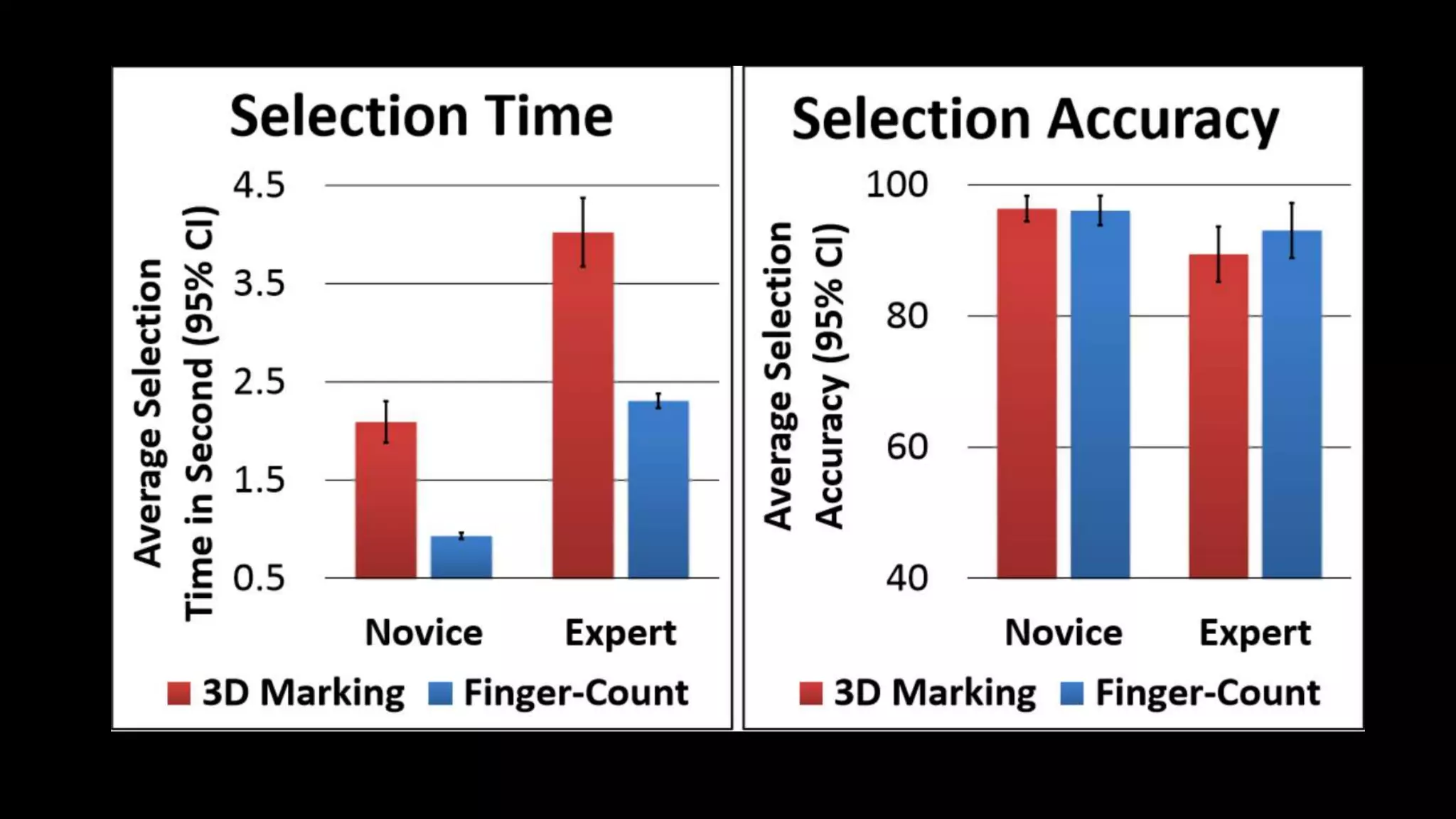
该文档探讨了基于手指的3D手势菜单选择的有效性,比较了手指计数、手持和拇指向上三种手势的选择时间和准确性。结果显示手指计数的用户接受度最高,而拇指向上的选择时间最长且准确性最低。手持手势具有最佳准确性和最低臂部疲劳度。