Recommended

Recommended
More Related Content
What's hot
What's hot (20)
Viewers also liked
Viewers also liked (14)
Similar to EPRI_QUAD3 - SD2 POSTER
Similar to EPRI_QUAD3 - SD2 POSTER (20)
EPRI_QUAD3 - SD2 POSTER
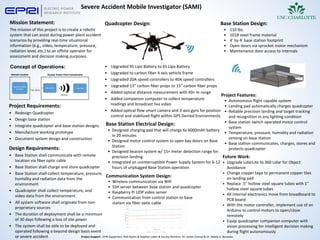
- 1. Quadcopter Design: • Upgraded 4S Lipo Battery to 6S Lipo Battery • Upgraded to carbon fiber 4 axis vehicle frame • Upgraded 20A speed controllers to 40A speed controllers • Upgraded 13” carbon fiber props to 15” carbon fiber props • Added optical distance measurement with 40+ m range • Added companion computer to collect temperature readings and broadcast live video • Added optical flow smart camera and 3-axis gyro for position control and stabilized flight within GPS Denied Environments Project Requirements: • Redesign Quadcopter • Design base station • Integrate quadcopter and base station designs • Manufacture working prototype • Document system design and construction Project Support - EPRI Supporters: Rob Austin & Stephen Lopez & Faculty Mentors: Dr. James Conrad & Dr. Nabila A. BouSaba Severe Accident Mobile Investigator (SAMI) Mission Statement: The mission of this project is to create a robotic system that can assist during power plant accident scenarios by providing real-time situational information (e.g., video, temperature, pressure, radiation level, etc.) to an offsite operator for assessment and decision making purposes. Project Features: • Autonomous flight capable system • Landing pad automatically charges quadcopter • Reliable precision landing and target tracking and recognition in any lighting condition • Base station switch operated motor control system • Temperature, pressure, humidity and radiation sensing on base station • Base station communicates, charges, stores and protects quadcopter Base Station Electrical Design: • Designed charging pad that will charge 6s 6000mAh battery in 20 minutes • Designed motor control system to open bay doors on Base Station • Designed beacon system w/ 15+ meter detection range for precision landing • Integrated an uninterruptible Power Supply System for 6-12 hours of unplugged Base Station operation Communication System Design: • Wireless communication via Wifi • SSH server between base station and quadcopter • Raspberry Pi UDP video server • Communication from control station to base station via fiber optic cable Base Station Design: • 110 lbs. • 1018 steel frame material • 4’ by 4’ base station footprint • Open doors via sprocket motor mechanism • Maintenance door access to internals Future Work: • Upgrade LidarLite to 360 Lidar for Object Avoidance • Change copper tape to permanent copper tiles on landing pad • Replace .5” hollow steel square tubes with 1” hollow steel square tubes • All internal electronics move from breadboard to PCB board • With the motor controller, implement use of an Arduino to control motors to open/close remotely • Equip quadcopter companion computer with vision processing for intelligent decision making during flight autonomously Design Requirements: • Base Station shall communicate with remote location via fiber optic cable • Base Station shall charge and store quadcopter • Base Station shall collect temperature, pressure, humidity and radiation data from the environment • Quadcopter shall collect temperature, and video data from the environment • All system software shall originate from non- proprietary sources • The duration of deployment shall be a minimum of 30 days following a loss of site power • The system shall be able to be deployed and operated following a beyond design basis event or severe accident Operation Station Controller Base Station Quadcopter Nuclear Power Plant ContainmentRemote Location Fiber Optics Wireless Concept of Operations:
Editor's Notes
- At the control station – command doors to open via ssh – quadcopter flies out. Senses center of the pad