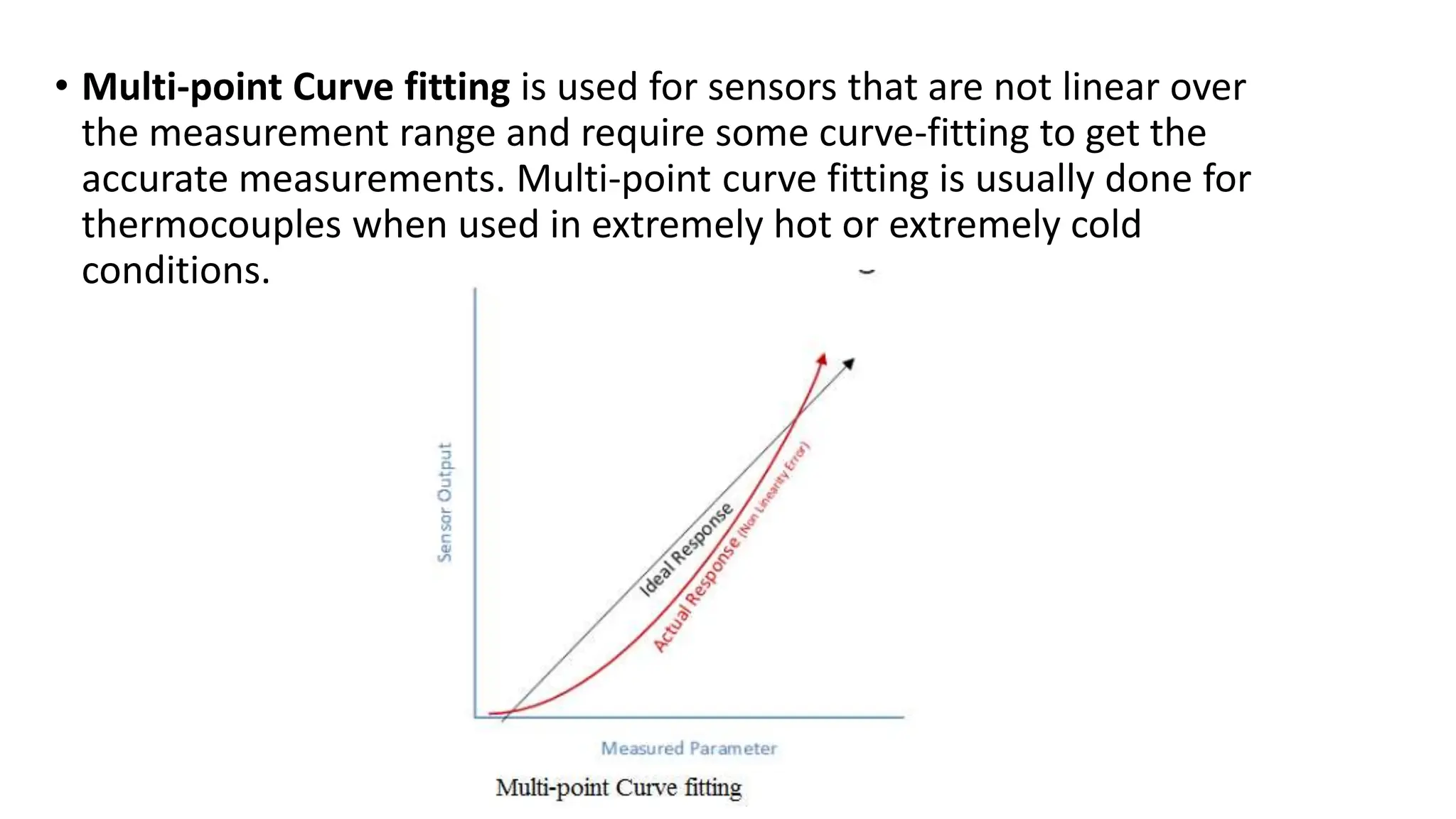
Sensors are electronic devices that measure physical parameters like temperature, pressure, and light intensity. They output either analog or digital electrical signals. Sensors require calibration to correct for errors from environmental changes by comparing their output to a standard reference. Common calibration methods include one-point, two-point, and multi-point curve fitting. Sensors produce different types of output signals such as analog voltages/currents, digital values, pulses, and serial communications.