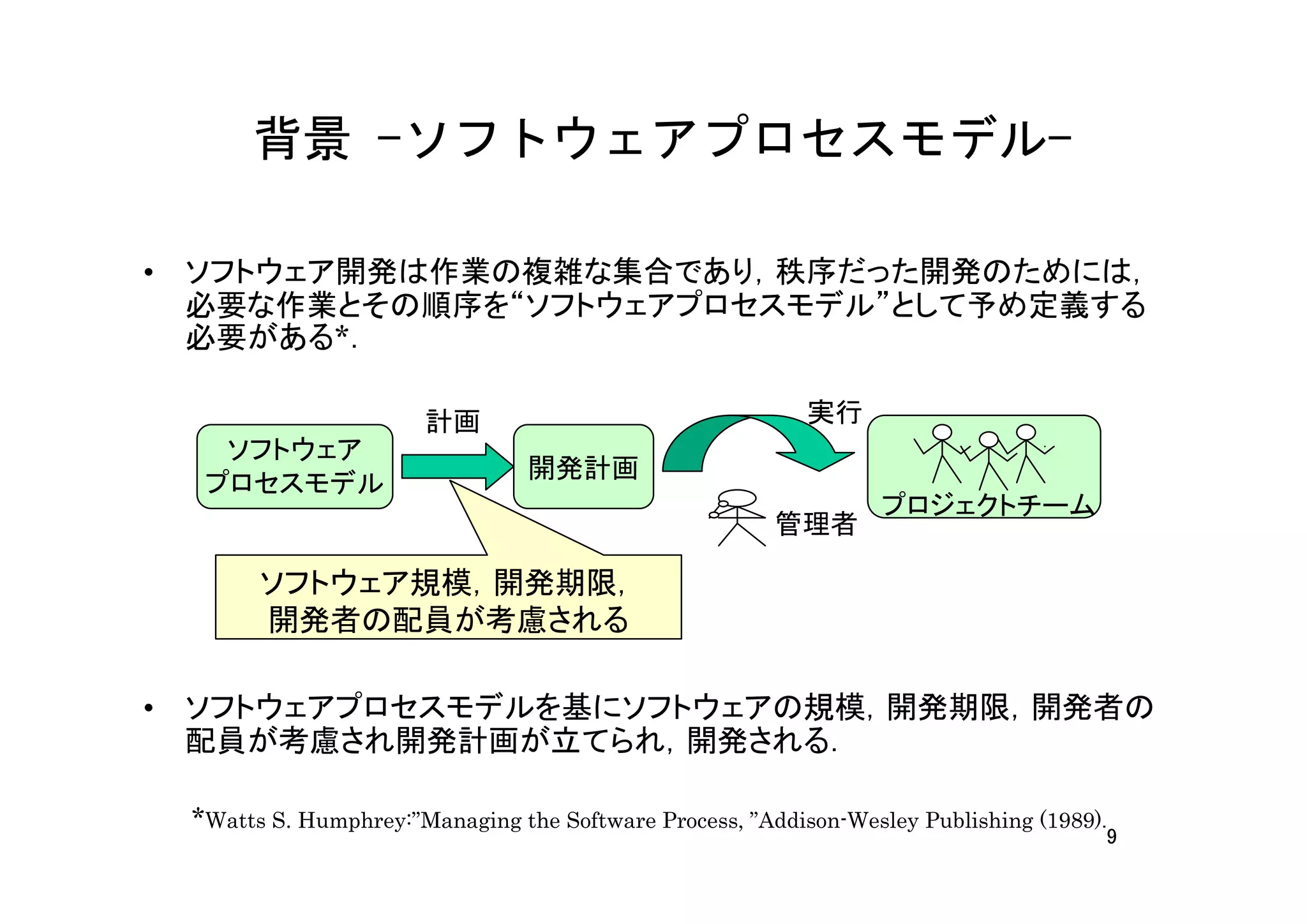
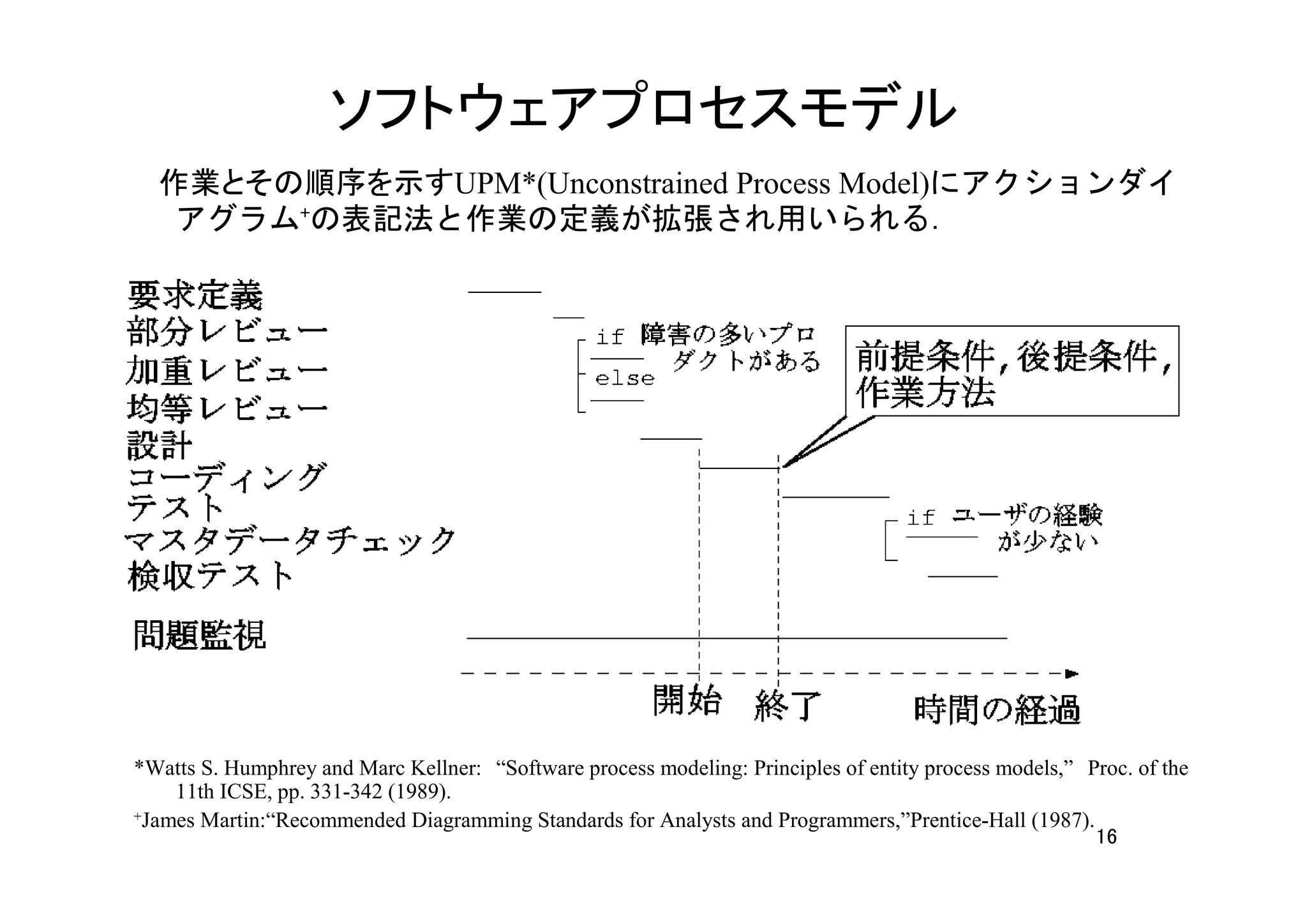
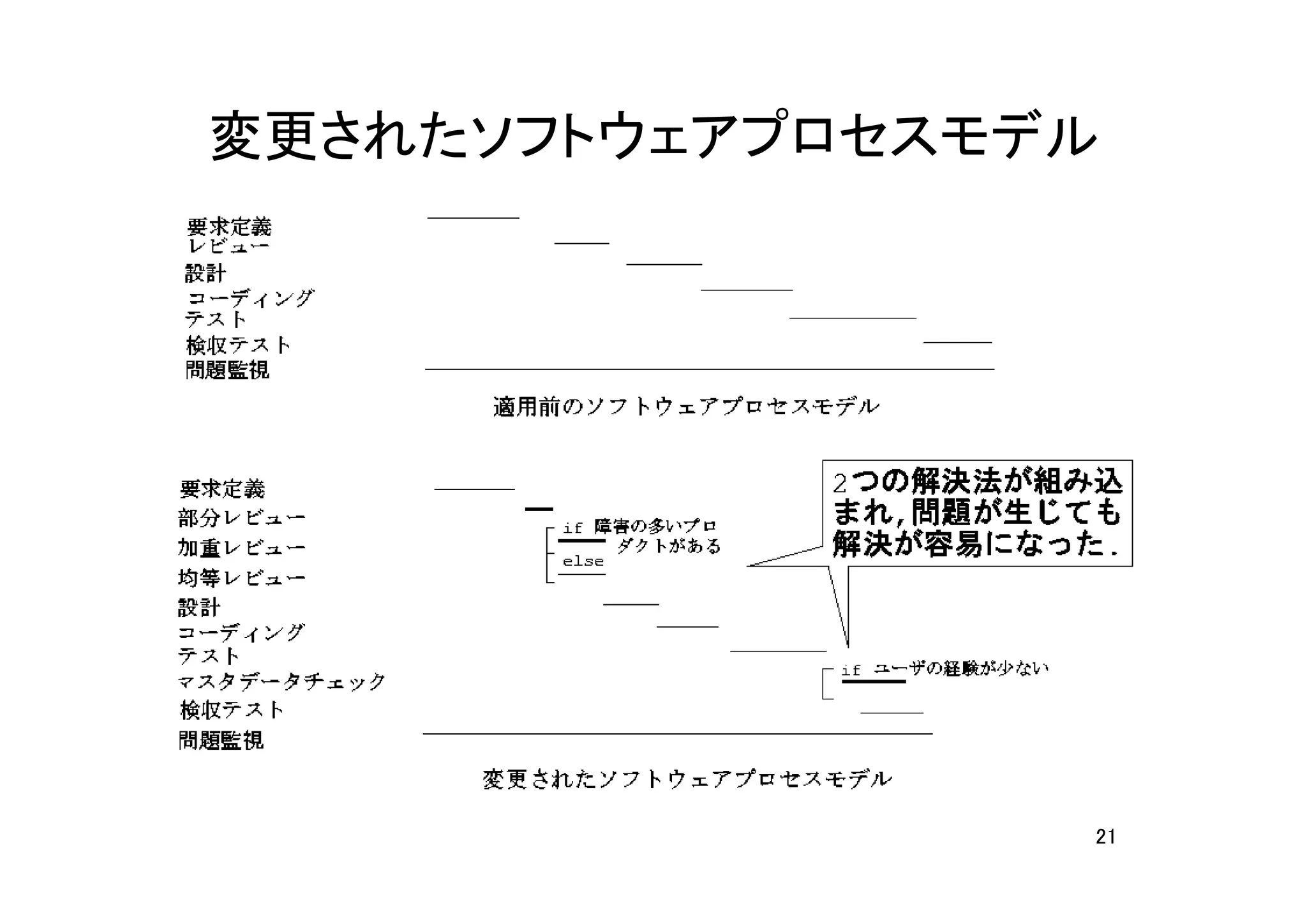
ソフトウェアプロセスモデル
作業とその順序を示すUPM*(Unconstrained Process Model)にアクションダイ
アグラム+の表記法と作業の定義が拡張され用いられる.
*Watts S. Humphrey and Marc Kellner: “Software process modeling: Principles of entity process models,” Proc. of the
11th ICSE, pp. 331-342 (1989).
+James Martin:“Recommended Diagramming Standards for Analysts and Programmers,”Prentice-Hall (1987).
16
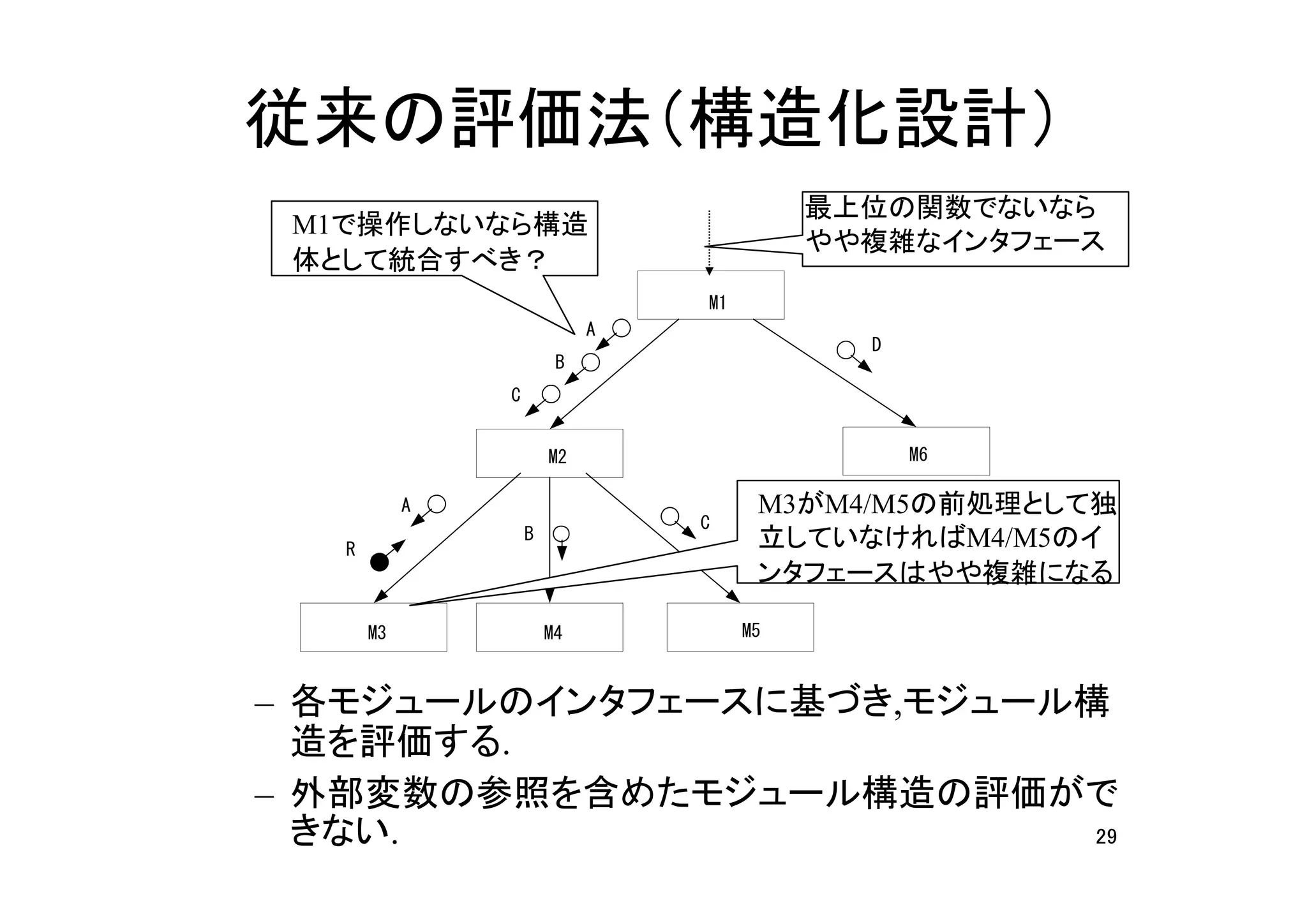
従来の評価法(構造化設計)
最上位の関数でないなら
M1で操作しないなら構造
やや複雑なインタフェース
体として統合すべき?
M1
A
D
B
C
M2 M6
A M3がM4/M5の前処理として独
C
R
B 立していなければM4/M5のイ
ンタフェースはやや複雑になる
M3 M4 M5
– 各モジュールのインタフェースに基づき,モジュール構
造を評価する.
– 外部変数の参照を含めたモジュール構造の評価がで
きない. 29
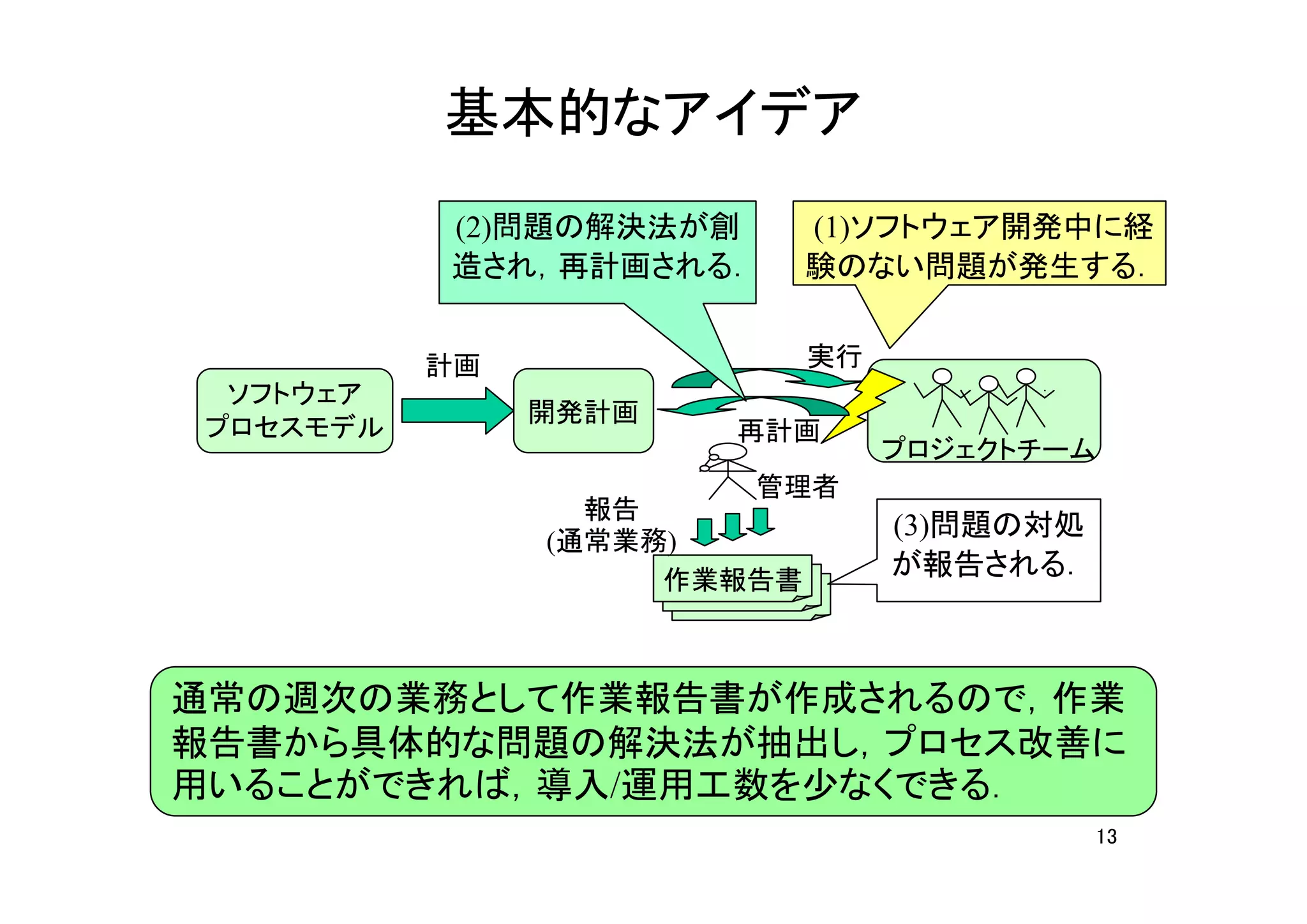
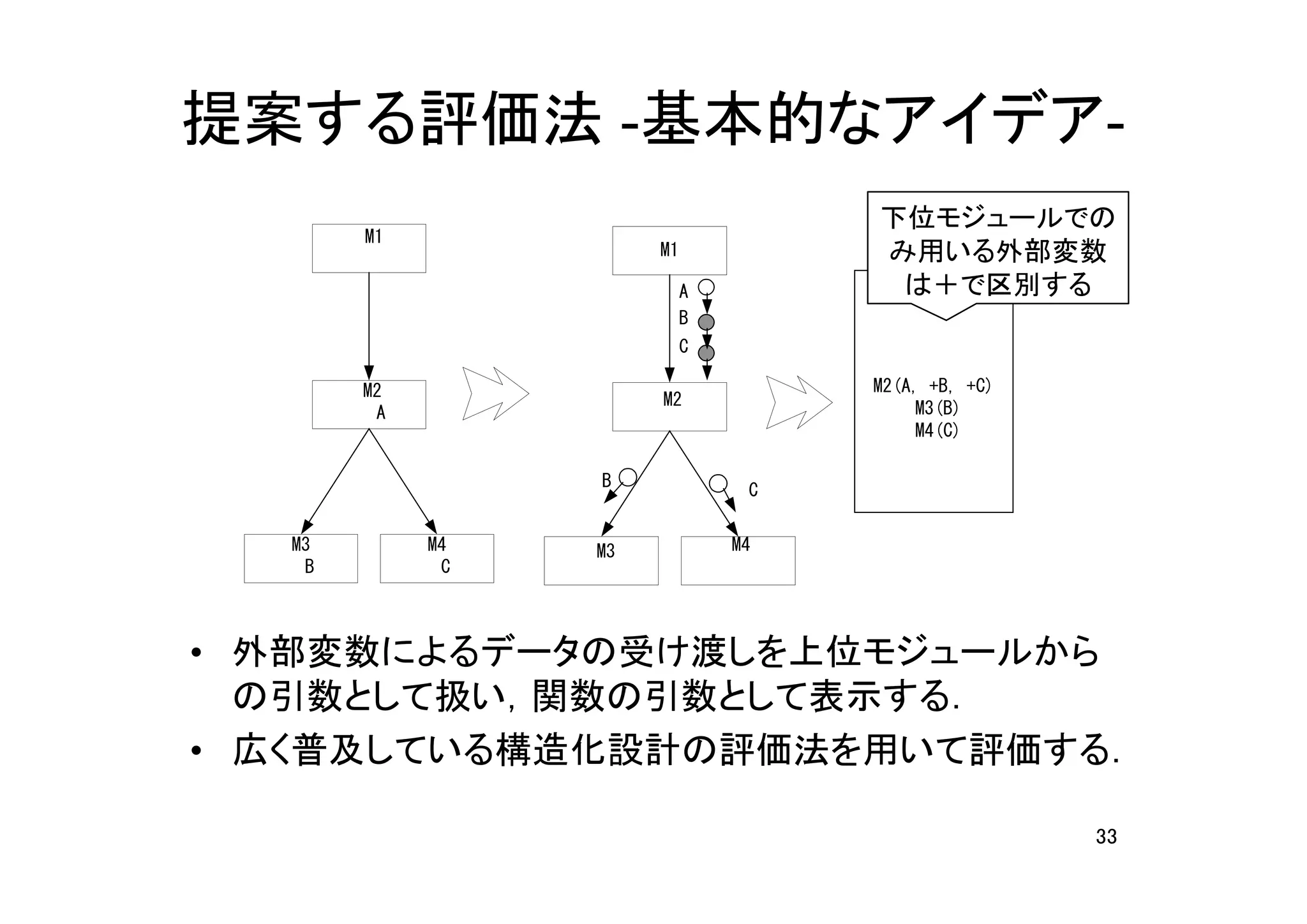
提案する評価法 -基本的なアイデア-
下位モジュールでの
M1
M1 み用いる外部変数
A は+で区別する
B
C
M2 M2(A, +B, +C)
M2 M3(B)
A
M4(C)
B C
M3 M4 M3 M4
B C
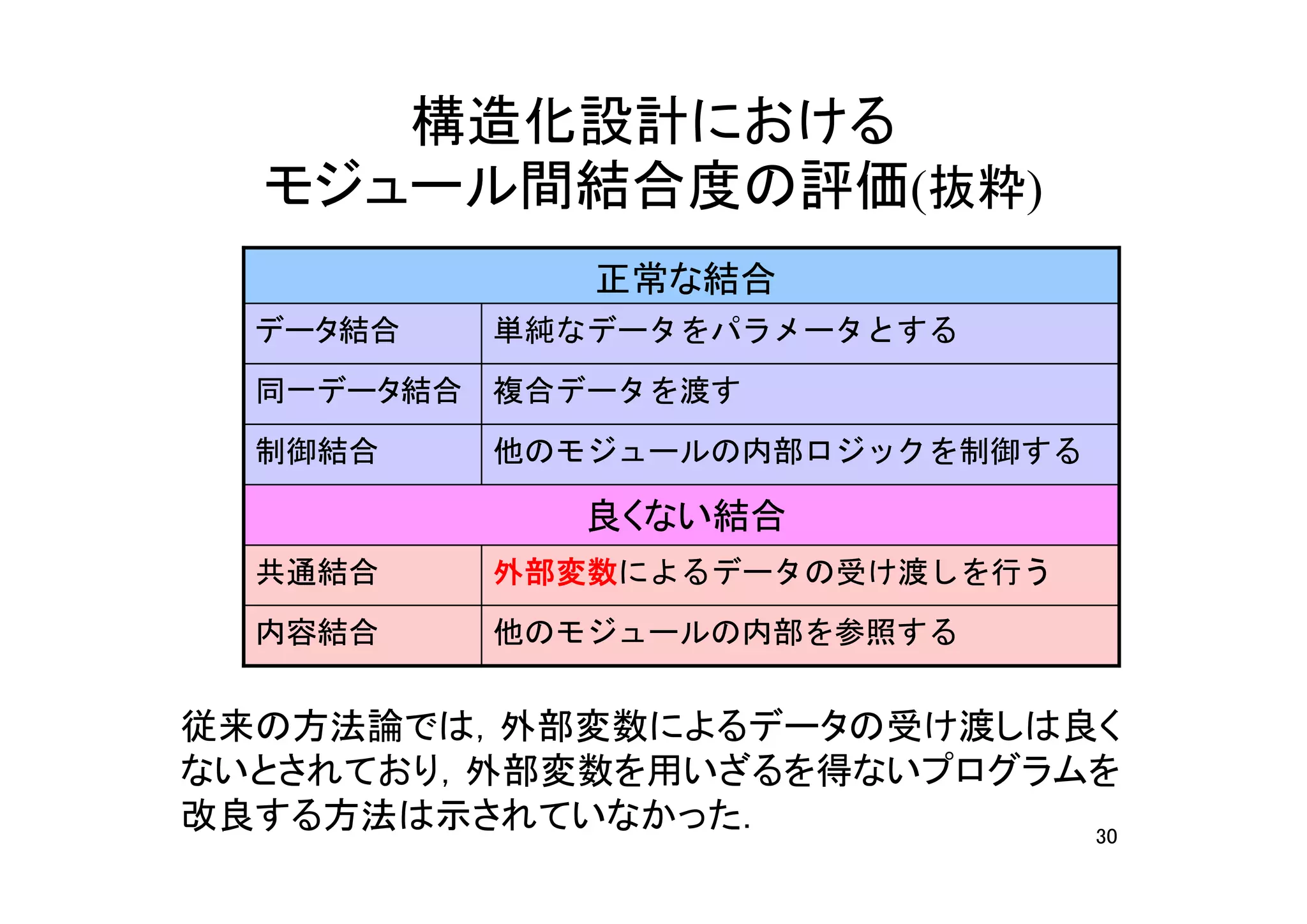
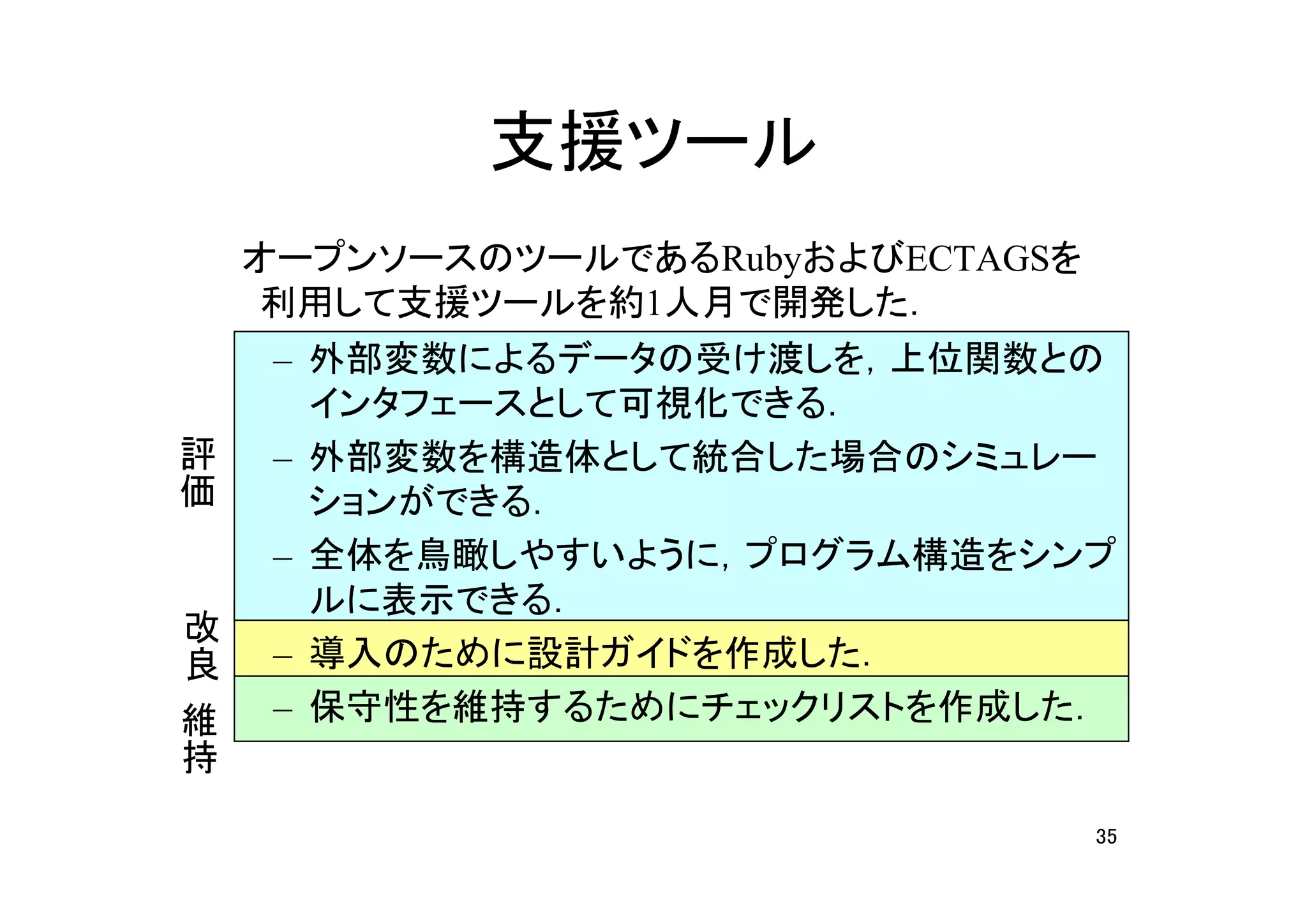
• 外部変数によるデータの受け渡しを上位モジュールから
の引数として扱い,関数の引数として表示する.
• 広く普及している構造化設計の評価法を用いて評価する.
33
34.
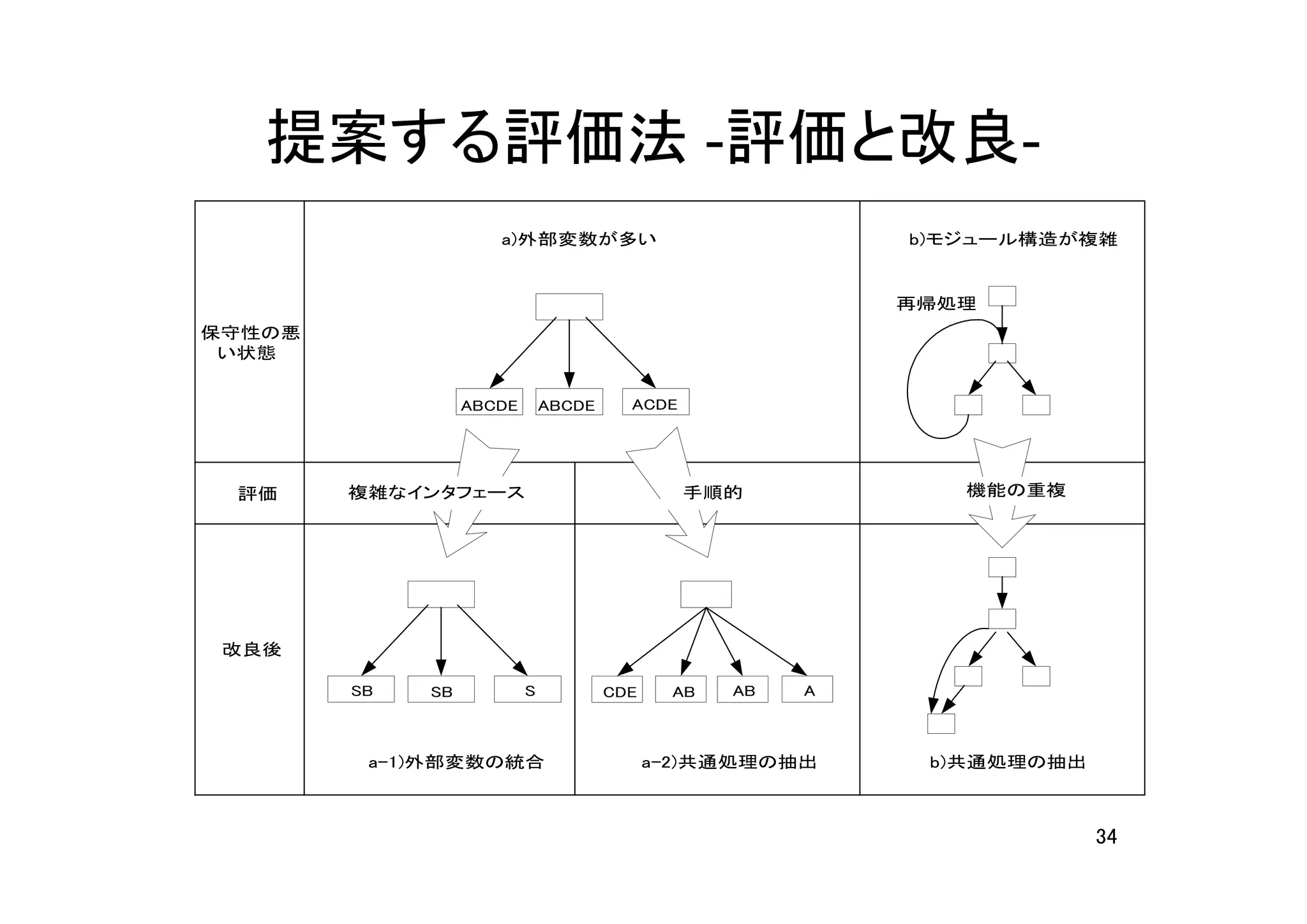
提案する評価法 -評価と改良-
a)外部変数が多い b)モジュール構造が複雑
再帰処理
保守性の悪
い状態
ABCDE ABCDE ACDE
評価 複雑なインタフェース 手順的 機能の重複
改良後
SB SB S CDE AB AB A
a-1)外部変数の統合 a-2)共通処理の抽出 b)共通処理の抽出
34


![ツールの構造
関数および
ソースファイル 外部変数参照情報 ツール
Ruby
関数定義情報
ECTAGS 出力
test_1st(+DXpass, +TLsrams, TLzensrams)
test_2nd(+DXpass, TLsrams, +TLzensrams)
test_3rd(DXpass, +TLzensrams)
[再]test_1st(DXpass, TLsrams, TLzensrams)
外部変数分類定義 test_B(+DXpass, +TLsrams, TLzensrams)
[既]test_2nd(+DXpass, TLsrams, +TLzensrams)
外部変数をどのように構造 再帰処理には[再],既に展開され
図 1 ツールの構造
体として統合するかを示す たツリーには[既]が表示される
36](https://image.slidesharecdn.com/dthesisohp-101002073905-phpapp01/75/slide-36-2048.jpg)


















![[ESM_CM セミナー]小さく作って大いに役立つスマートフォンアプリ(CYCLONE)公開用](https://cdn.slidesharecdn.com/ss_thumbnails/withesmsmartphoneapplicationandcyclonecodename1000-111207215903-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)

















![[Node-RED] ファンクションノードのデバッグどうしてる?](https://cdn.slidesharecdn.com/ss_thumbnails/debugstyleoffunctionnode-190530142737-thumbnail.jpg?width=640&height=640&fit=bounds)
















